当前位置: 首页 > news >正文 商用车的智慧眼车规级激光雷达 news 2025/9/16 1:49:52 1、商用车×自动驾驶技术:巨大的降本增效空间 2、感知是第一步:看懂环境路况才能安全的自动驾驶 3、多传感器融合,感知信息冗余,保障自动驾驶安全 4、商用车需要什么样的激光雷达 5、车规级激光雷达的软硬件成熟度及延展性 (1)需要更强的硬件性能 (2)更耐用,更可靠 (3)生命周期内成本可控 查看全文 http://www.lryc.cn/news/246894.html 相关文章: 【NI-RIO入门】为CompactRIO供电 【数据结构/C++】栈和队列_链队列 C#,《小白学程序》第二十一课:大数的减法(BigInteger Subtract) HarmonyOS ArkTS Video组件的使用(七) 【深度学习实验】注意力机制(四):点积注意力与缩放点积注意力之比较 用于图像分类任务的经典神经网络综述 Linux如何查找某个路径下大于1G的文件 Java二级医院区域HIS信息管理系统源码(SaaS服务) 自制编程语言(第三弹)定义Token linux下的工具---yum java全局异常处理(springboot) JAVA将PDF转图片 合并区间[中等] MYSQL基础知识之【LIKE子句的使用 ,NULL值的处理,空值的处理】 线索二叉树:C++实现 C++——vector互换容器与预留空间 Unity 自带的一些可以操控时间的属性或方法。 vue 项目中使用 mqtt linux shell操作 - 05 进程 与 IO 模型 让SOME/IP运转起来——SOME/IP系统设计(下)之数据库开发 Mybatis反射工厂类DefaultReflectorFactory antDesignPro a-table样式二次封装 找免费4K高清图片素材,就上这6个网站 代码随想录算法训练营第35天| 860.柠檬水找零 406.根据身高重建队列 452. 用最少数量的箭引爆气球 成为AI产品经理——TPR、FPR、ROC、AUC java: Internal error in the mapping processor: java.lang.NullPointerException TCP知识点 大语言模型(LLMs)在 Amazon SageMaker 上的动手实践(一) 顶级数据恢复工具—— 最全的15个数据恢复软件榜单 【图像分类】【深度学习】【Pytorch版本】Inception-ResNet模型算法详解
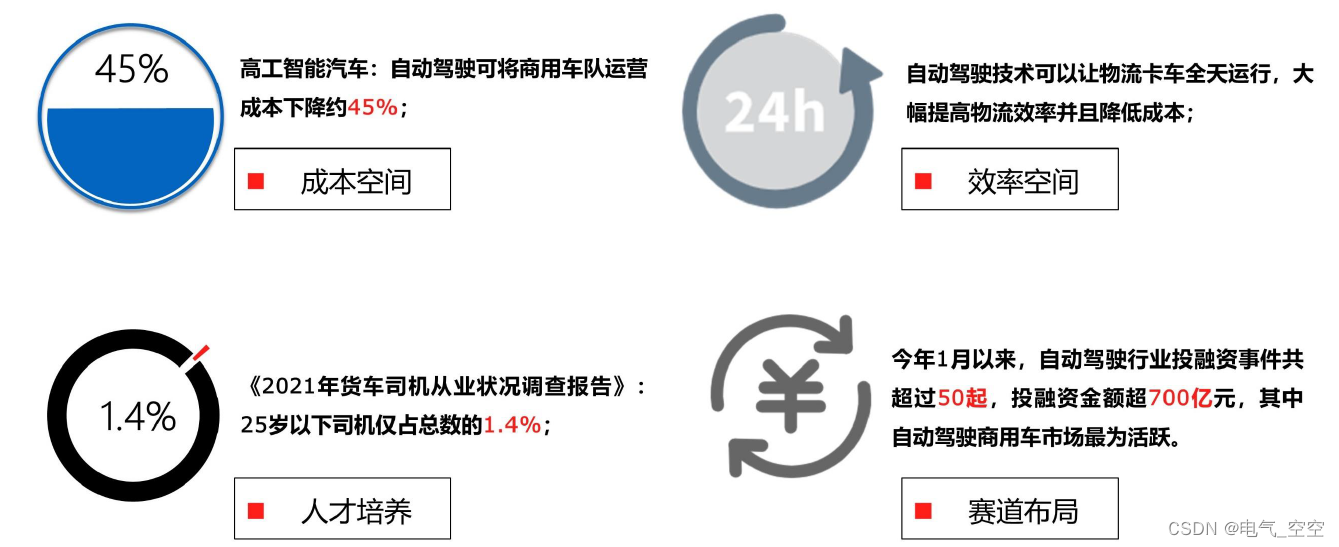
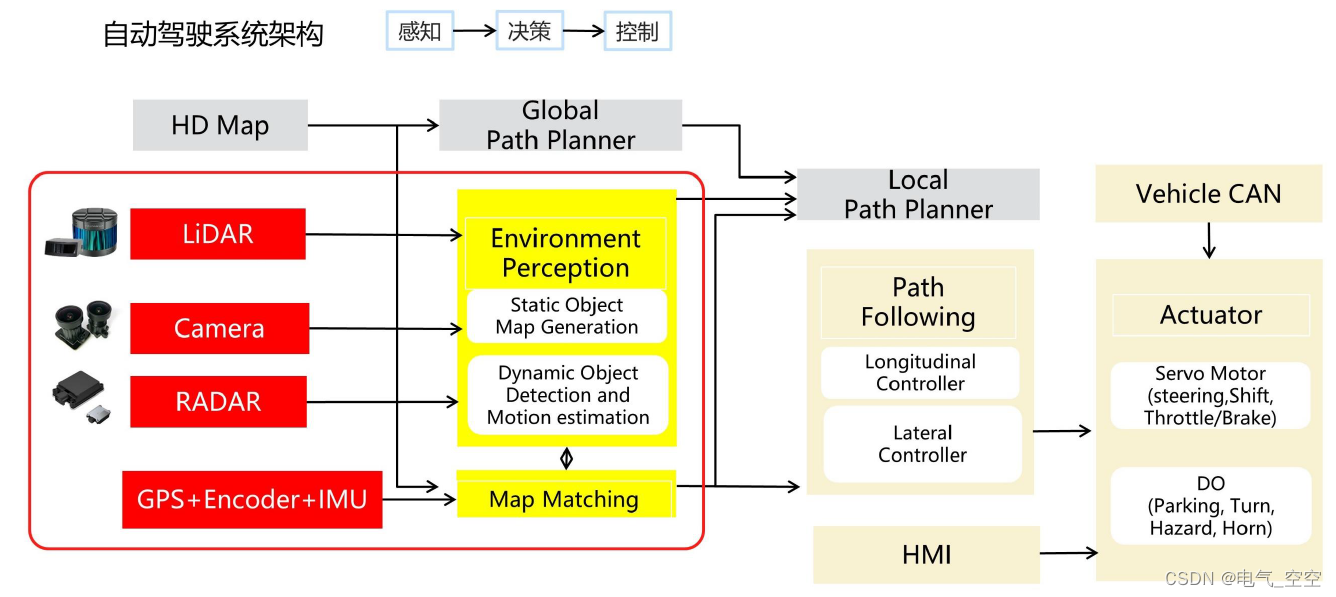
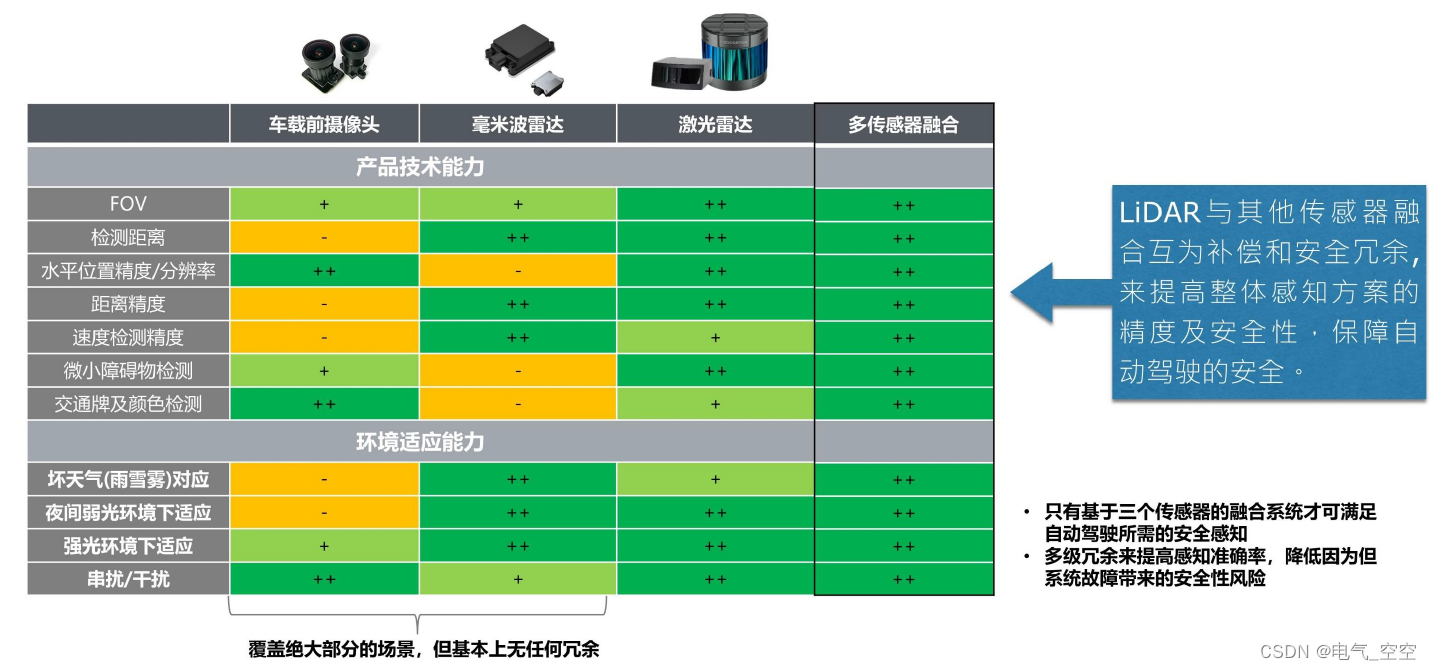
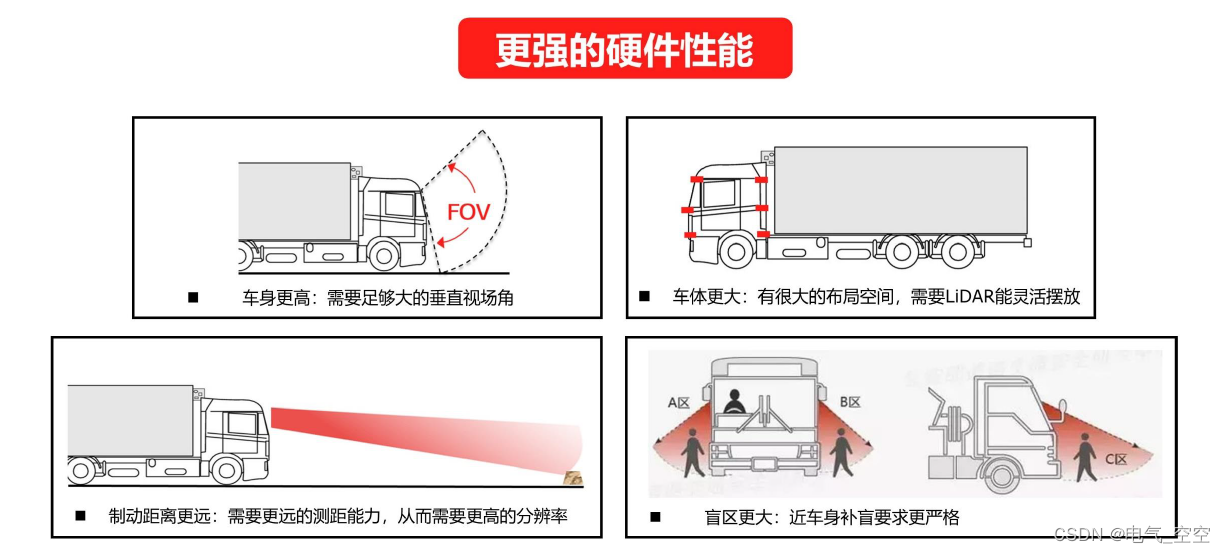
1、商用车×自动驾驶技术:巨大的降本增效空间 2、感知是第一步:看懂环境路况才能安全的自动驾驶 3、多传感器融合,感知信息冗余,保障自动驾驶安全 4、商用车需要什么样的激光雷达 5、车规级激光雷达的软硬件成熟度及延展性 (1)需要更强的硬件性能 (2)更耐用,更可靠 (3)生命周期内成本可控 查看全文 http://www.lryc.cn/news/246894.html 相关文章: 【NI-RIO入门】为CompactRIO供电 【数据结构/C++】栈和队列_链队列 C#,《小白学程序》第二十一课:大数的减法(BigInteger Subtract) HarmonyOS ArkTS Video组件的使用(七) 【深度学习实验】注意力机制(四):点积注意力与缩放点积注意力之比较 用于图像分类任务的经典神经网络综述 Linux如何查找某个路径下大于1G的文件 Java二级医院区域HIS信息管理系统源码(SaaS服务) 自制编程语言(第三弹)定义Token linux下的工具---yum java全局异常处理(springboot) JAVA将PDF转图片 合并区间[中等] MYSQL基础知识之【LIKE子句的使用 ,NULL值的处理,空值的处理】 线索二叉树:C++实现 C++——vector互换容器与预留空间 Unity 自带的一些可以操控时间的属性或方法。 vue 项目中使用 mqtt linux shell操作 - 05 进程 与 IO 模型 让SOME/IP运转起来——SOME/IP系统设计(下)之数据库开发 Mybatis反射工厂类DefaultReflectorFactory antDesignPro a-table样式二次封装 找免费4K高清图片素材,就上这6个网站 代码随想录算法训练营第35天| 860.柠檬水找零 406.根据身高重建队列 452. 用最少数量的箭引爆气球 成为AI产品经理——TPR、FPR、ROC、AUC java: Internal error in the mapping processor: java.lang.NullPointerException TCP知识点 大语言模型(LLMs)在 Amazon SageMaker 上的动手实践(一) 顶级数据恢复工具—— 最全的15个数据恢复软件榜单 【图像分类】【深度学习】【Pytorch版本】Inception-ResNet模型算法详解