python基于GCN(图卷积神经网络模型)和LSTM(长短期记忆神经网络模型)开发构建污染物时间序列预测模型
在以往的时间序列预测建模中广泛使用的是回归类算法模型和RNN类的算法模型,相对来说技术栈会更稳定一些,最近有一个实际业务场景的需求,在建模的过程中要综合考虑其余点位的影响依赖,这时候我想到了之前做过的交通流量和速度预测相关的项目,在那里采用的就是图相关的算法模型,所以这里也想对标来开发。
GCN(Graph Convolutional Network)是一种用于处理图结构数据的卷积神经网络模型。它的构建原理是基于图卷积操作,通过在图上进行局部的卷积运算来提取节点的特征表示。
具体来说,GCN通过邻居节点的信息聚合来更新每个节点的表示。GCN的每一层都可以表示为以下的公式:
H^{(l+1)} = σ(D^{-0.5}AD^{-0.5}H^{(l)}W^{(l)})
其中,H^{(l)}表示第l层的节点表示矩阵,A表示节点之间的邻接矩阵,D是度矩阵,W^{(l)}表示第l层的权重矩阵,σ表示激活函数。
GCN的优点主要体现在以下几个方面:
- 考虑了节点的邻居信息:GCN通过聚合节点的邻居信息来更新节点的表示,能够捕捉到节点的局部结构信息,适用于处理图结构数据。
- 具有共享权重的卷积:GCN通过共享权重矩阵来进行卷积操作,减少了需要学习的参数数量,降低了模型的复杂度。
- 良好的泛化能力:GCN能够将节点的特征向量传递给邻居节点,从而在整个图上进行信息传播,有助于节点的特征表示学习。
然而,GCN也存在一些缺点:
- 无法处理动态图:GCN对于静态图结构的处理效果较好,但对于动态图的处理存在一定的困难,因为动态图的结构会随着时间的推移而变化。
- 局部邻居信息的限制:GCN只考虑节点的一阶邻居信息,对于高阶邻居信息的利用能力有限。
- 对大规模图的计算开销较大:GCN的计算复杂度与图的规模相关,对于大规模图的处理需要较高的计算资源。
GCN作为一种处理图结构数据的卷积神经网络模型,具有考虑邻居信息、共享权重、泛化能力强等优点,但对动态图的处理存在限制,并且对大规模图的计算开销较大。
LSTM(Long Short-Term Memory)是一种用于处理序列数据的循环神经网络模型。它的构建原理是通过引入门控机制来解决传统RNN存在的梯度消失和梯度爆炸问题,从而能够更好地捕捉长期依赖关系。
具体来说,LSTM通过三个门控单元(输入门、遗忘门和输出门)来控制信息的流动和记忆的更新。它的计算过程可以表示为以下公式:
输入门:i_t = σ(W_{xi}x_t + W_{hi}h_{t-1} + b_i)
遗忘门:f_t = σ(W_{xf}x_t + W_{hf}h_{t-1} + b_f)
输出门:o_t = σ(W_{xo}x_t + W_{ho}h_{t-1} + b_o)
新的记忆:\tilde{c}t = tanh(W{xc}x_t + W_{hc}h_{t-1} + b_c)
细胞状态更新:c_t = f_t \odot c_{t-1} + i_t \odot \tilde{c}_t
隐藏状态更新:h_t = o_t \odot tanh(c_t)
其中,i_t、f_t和o_t分别表示输入门、遗忘门和输出门的输出,\tilde{c}_t表示新的记忆,c_t表示细胞状态,h_t表示隐藏状态,x_t表示当前时刻的输入。
LSTM的优点主要体现在以下几个方面:
- 解决了梯度消失和梯度爆炸问题:通过门控机制,LSTM能够有效地捕捉长期依赖关系,解决了传统RNN在处理长序列时产生的梯度问题。
- 长期记忆能力强:LSTM能够在细胞状态中长期存储信息,有助于模型记住对当前任务有用的信息。
- 能够处理不定长的序列:LSTM可以处理不定长的序列数据,适用于多种应用场景,如自然语言处理、语音识别等。
然而,LSTM也存在一些缺点:
- 计算复杂度较高:LSTM中引入了多个门控单元和记忆单元,导致模型的计算复杂度较高,对计算资源要求较大。
- 可能存在过拟合:LSTM的参数数量较多,模型容易过拟合,需要采取一些正则化方法来缓解这个问题。
- 难以并行化:LSTM的计算过程涉及到门控单元的计算,导致模型难以进行有效的并行化,限制了其在大规模数据上的应用。
LSTM作为一种用于处理序列数据的循环神经网络模型,具有解决梯度问题、长期记忆能力强等优点,但计算复杂度较高、难以并行化等缺点。
这里本文的核心思想是想要基于GCN+LSTM来实现图网络和时序网络的融合,开发构建更加适合业务需求的时间序列预测模型。
首先是数据集加载,如下所示:
with open("distance.json") as f:route_distances = json.load(f)
with open("nodedata.json") as f:speeds_array = json.load(f)
route_distances = np.array(route_distances)
speeds_array = np.array(speeds_array)
print(f"route_distances shape={route_distances.shape}")
print(f"speeds_array shape={speeds_array.shape}")结果输出如下所示:
route_distances shape=(23, 23)
speeds_array shape=(1056, 23)共包含了23个节点。
之后是创建邻接矩阵,如下:
num_routes = route_distances.shape[0]
route_distances = route_distances / 10000
w2, w_mask = (route_distances * route_distances,np.ones([num_routes, num_routes]) - np.identity(num_routes),
)
adjacency_matrix = (np.exp(-w2 / sigma2) >= epsilon) * w_mask结果输出如下所示:
一个简单的GCN+LSTM实现如下所示:
def gcn_layer(adj_matrix, input_features, output_dim):# GCN层的实现adj_normalized = normalize_adj(adj_matrix) # 对邻接矩阵进行归一化处理output = Dense(output_dim)(adj_normalized @ input_features) # GCN的公式实现output = Activation('relu')(output)return output# 构建GCN+LSTM模型
def build_gcn_lstm_model(adj_matrix, input_dim, hidden_dim, output_dim):# 输入层inputs = Input(shape=(None, input_dim))# GCN层gcn_output = gcn_layer(adj_matrix, inputs, hidden_dim)# LSTM层lstm_output = LSTM(hidden_dim)(gcn_output)# 输出层outputs = Dense(output_dim, activation='softmax')(lstm_output)model = Model(inputs=inputs, outputs=outputs)model.compile(optimizer=Adam(lr=0.001), loss='categorical_crossentropy', metrics=['accuracy'])return model也可以自己定义新的layer都是可以的,如下:
class GCNLSTM(layers.Layer):def __init__(**kwargs):super().__init__(**kwargs)self.graph_conv = gcnLayer(in_feat, out_feat, graph_info, **graph_conv_params)self.lstm = layers.LSTM(lstm_units, activation="relu")self.dense = layers.Dense(output_seq_len)self.input_seq_len, self.output_seq_len = input_seq_len, output_seq_lendef get_config(self):config = super().get_config().copy()return configdef call(self, inputs):inputs = tf.transpose(inputs, [2, 0, 1, 3])gcn_out = self.graph_conv(inputs) shape = tf.shape(gcn_out)gcn_out = tf.reshape(gcn_out, (batch_size * num_nodes, input_seq_len, out_feat))lstm_out = self.lstm(gcn_out) dense_output = self.dense(lstm_out) output = tf.reshape(dense_output, (num_nodes, batch_size, self.output_seq_len))return tf.transpose(output, [1, 2, 0]) 之后就可以进行模型的训练了如下:
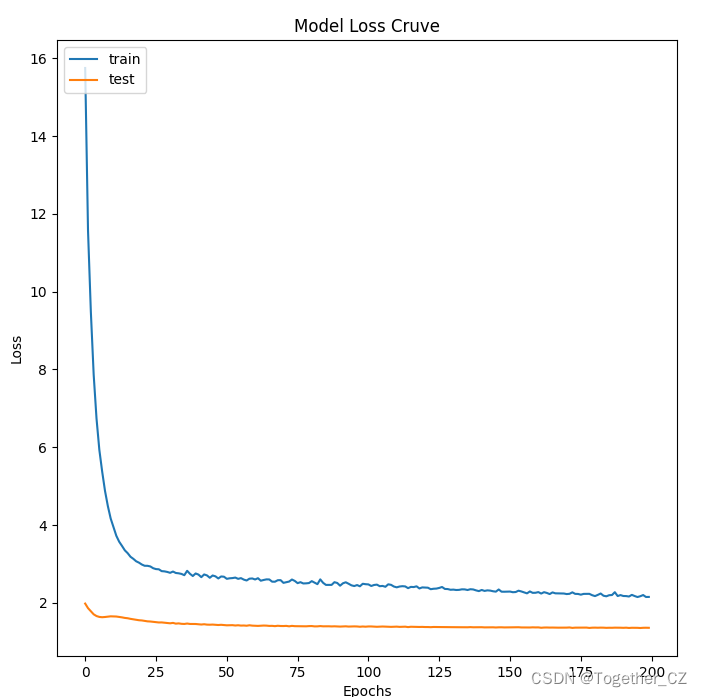
history=model.fit(X_train,y_train,validation_data=(X_test,y_test),epochs=200)
model.save("model.h5")
plotLoss(history.history["loss"],history.history["val_loss"],"loss.png")loss可视化如下所示:
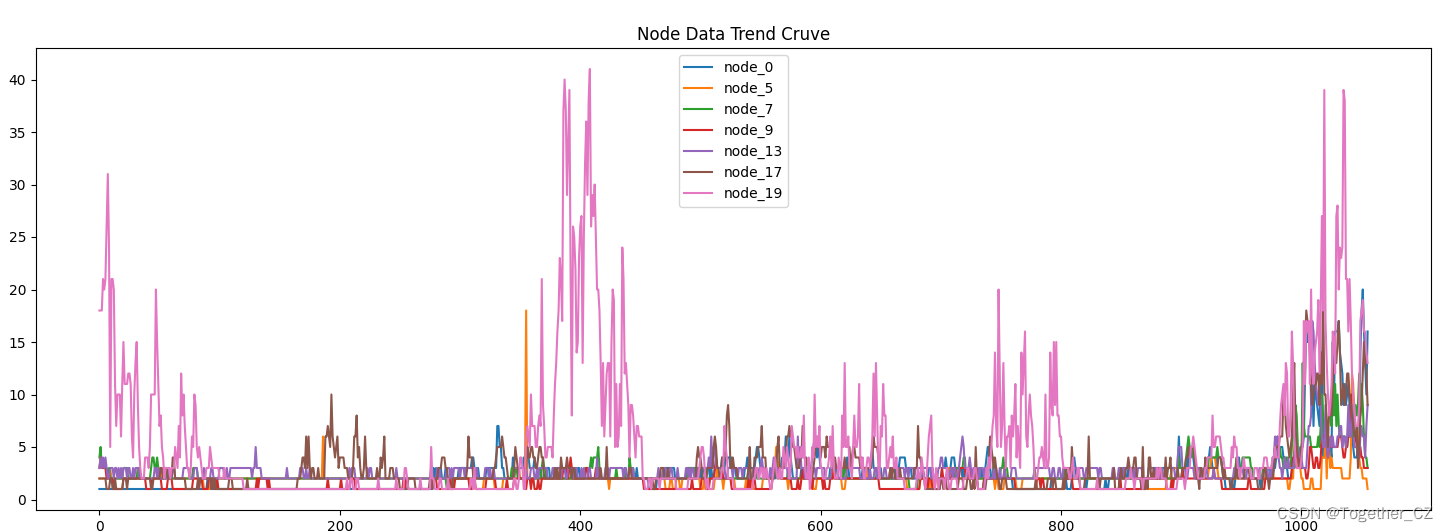
这里我们随机选取了几个node对其数据进行可视化,如下所示:
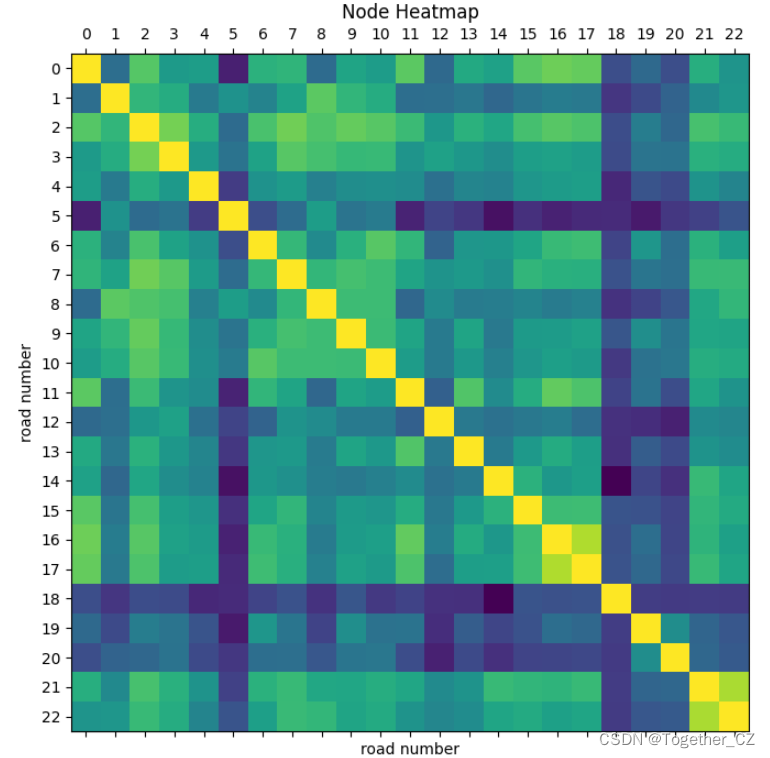
node之间的热力图如下所示:
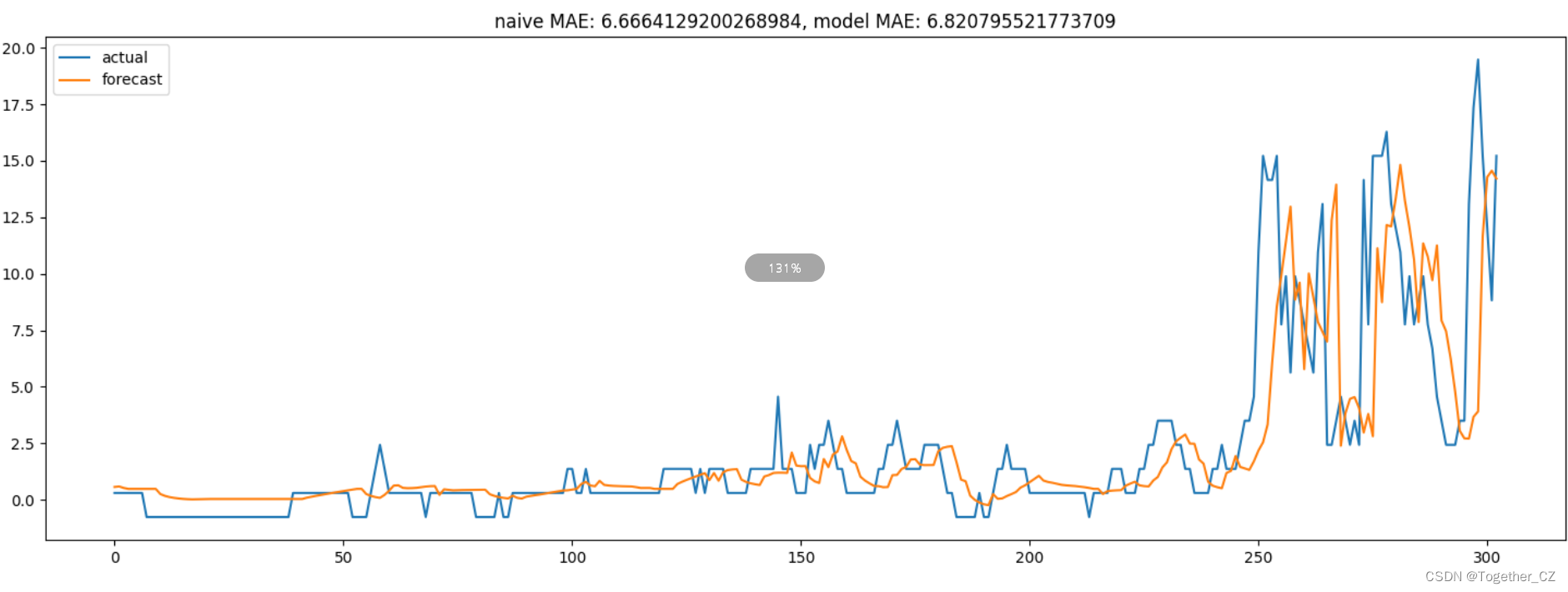
对测试集进行测试评估,对比曲线可视化结果如下所示:
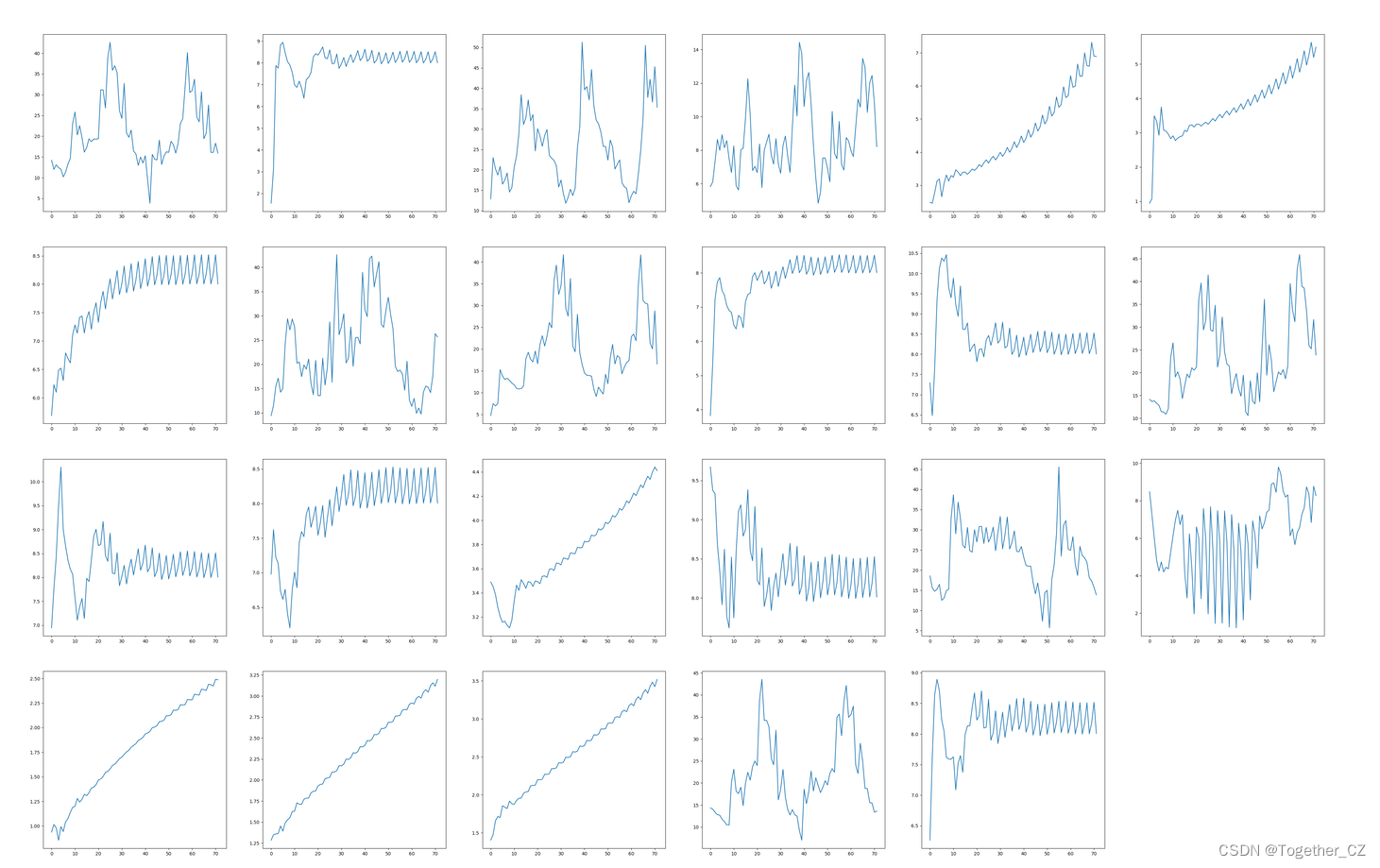
这里对不同node未来时刻进行持续预测,分别展示,如下所示:
这是一种比较新的建模方式,在实际应用中可以更多捕捉到不同节点的依赖性,这个是比较有用的一点,后续会在实际应用过程中继续挖掘。