STM32_3(GPIO)
GPIO简介
- GPIO(General Purpose Input Output)通用输入输出口
- 8种输入输出模式
- 输出模式可控制端口输出高电平,驱动LED、蜂鸣器、模拟通信协议输出时许等
- 输入模式可读取端口的高低电平或电压,用于读取按键输入、外接模块电平信号输入、ADC电压采集、模拟通信协议接收数据等
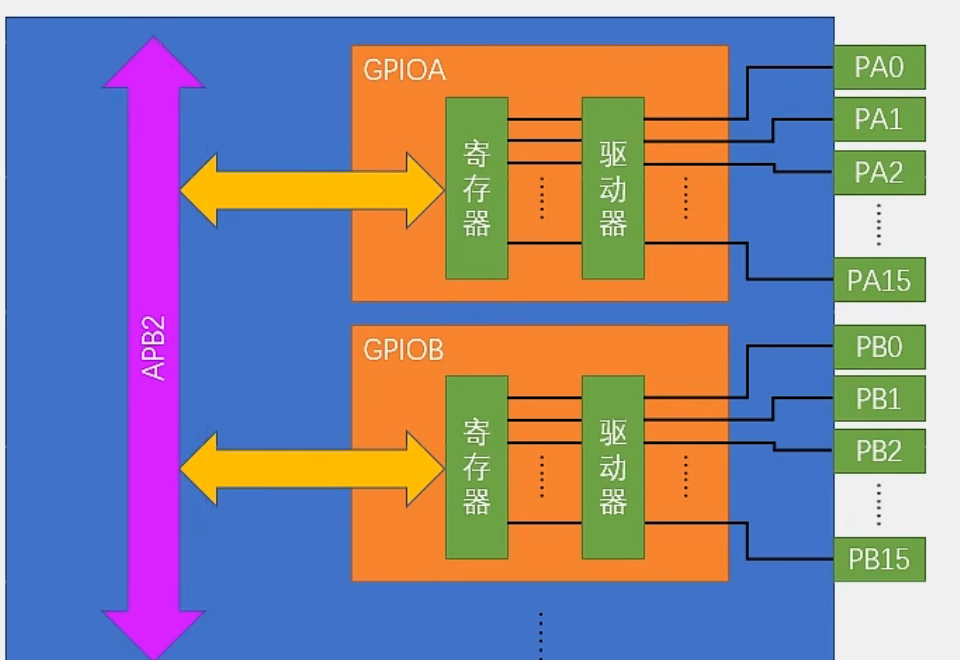
GPIO基本结构
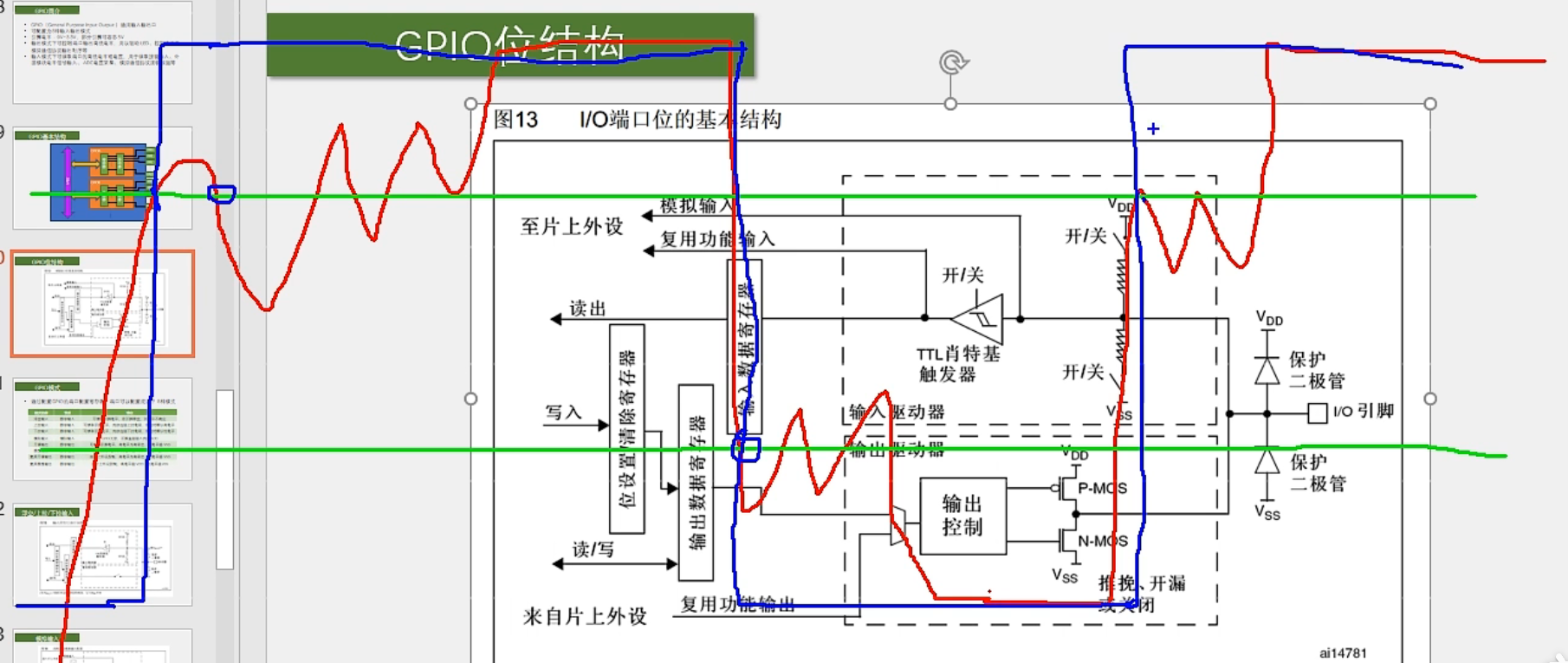
GPIO位结构
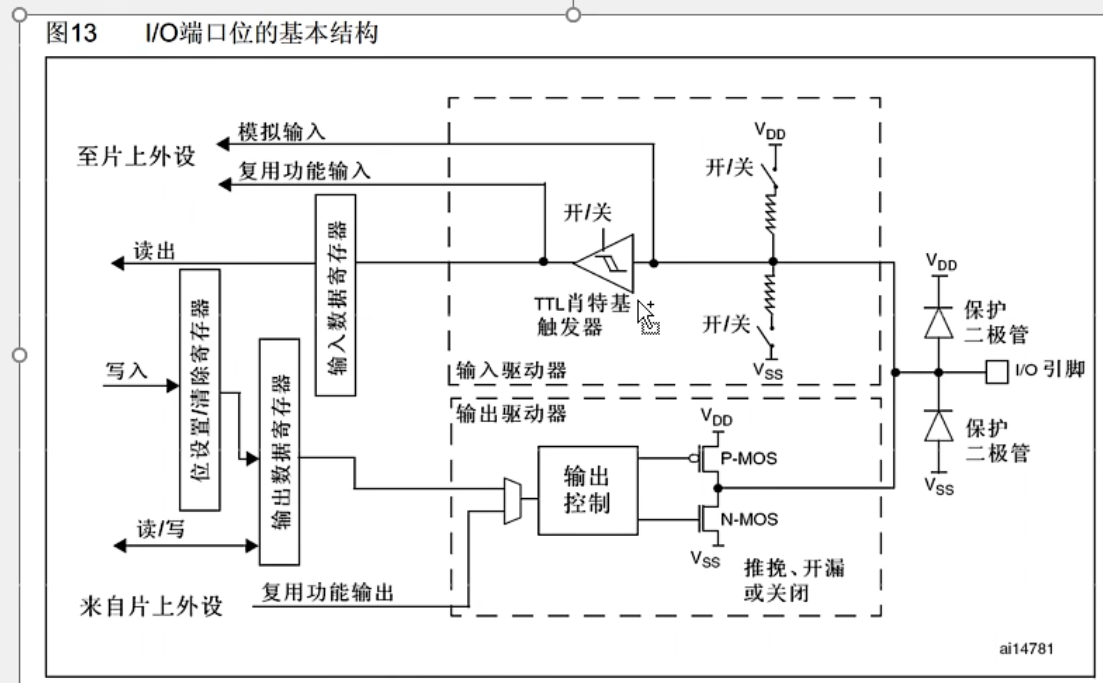
最左边是寄存器,中间是驱动器,右边是引脚。
上面是输入,下面是输出。
先说上面,VDD为上拉电阻,VSS为下拉电阻。
上拉电阻:默认为高电平输入模式。
下拉电阻:默认为低电平输入模式。
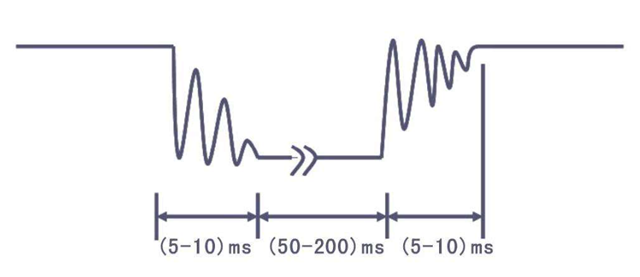
施密特触发器:只有高于上限或低于下限,输出才发生变化,类似于下图。
通过设置位设置和位清除寄存器,如果对某一位置1操作,在设置寄存器的对应位写1即可,剩下不需要设置的置0。
推挽输出模式下,P-MOS和N-MOS均有效,数据寄存器为1时,上管导通,下管断开,输出直接接到VDD,就是输出高电平。数据寄存器为0时,上管断开,下管导通,输出直接接到VSS,就是输出低电平。
开漏输出模式下,P-MOS无效,只有N-MOS在工作,数据寄存器为1时,下管断开,输出相当于断开,也就是高阻模式,数据寄存器为0时,下管导通,输出直接接到VSS,输出低电平。开漏模式可以作为通信协议的驱动方式。
8种模式
- 浮空输入:可读取引脚电平,若引脚悬空,则电平不确定
- 上拉输入:可读取引脚电平,内部连接上拉电阻,悬空时默认为高电平
- 下拉输入:可读取引脚电平,内部连接下拉电阻,悬空时默认为低电平
- 模拟输入:GPIO无效,引脚直接接入内部ADC
- 开漏输出:可输出引脚电平,高电平为高阻态,低电平接VSS
- 推挽输出:可输出引脚电平,高电平为VDD,低电平接VSS
- 复用开漏输出:由片上外设控制,可输出引脚电平,高电平为高阻态,低电平接VSS
- 复用推挽输出:由片上外设控制,可输出引脚电平,高电平为VDD,低电平接VSS
按键简介
按键抖动:由于按键内部使用的是机械式弹簧片来进行通断的,所以在按下和松手的瞬间会伴随有一连串的抖动。
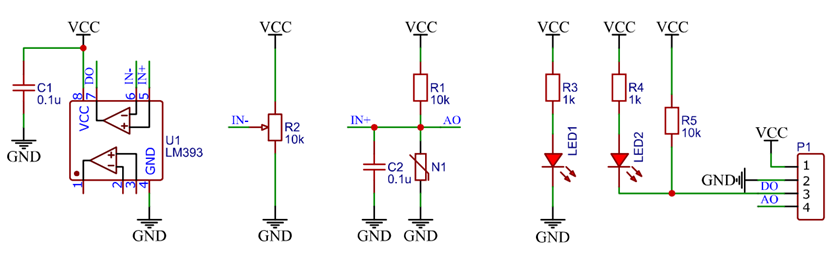
传感器模块介绍
传感器模块:传感器元件(光敏电阻/热敏电阻/红外接收管等)的电阻会随外界模拟量的变化而变化,通过与定值电阻分压即可得到模拟电压输出,再通过电压比较器进行二值化即可得到数字电压输出。
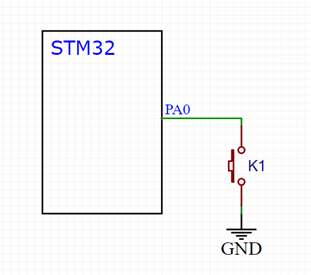
为什要接上拉,如果PA0没有接上拉,就会变成浮空,所以必须要接上拉。
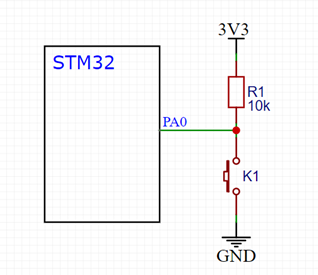
这个既可以接上拉也可也接浮空,上拉就是双电阻,更稳定,相应的损耗也大一些。
复习C语言
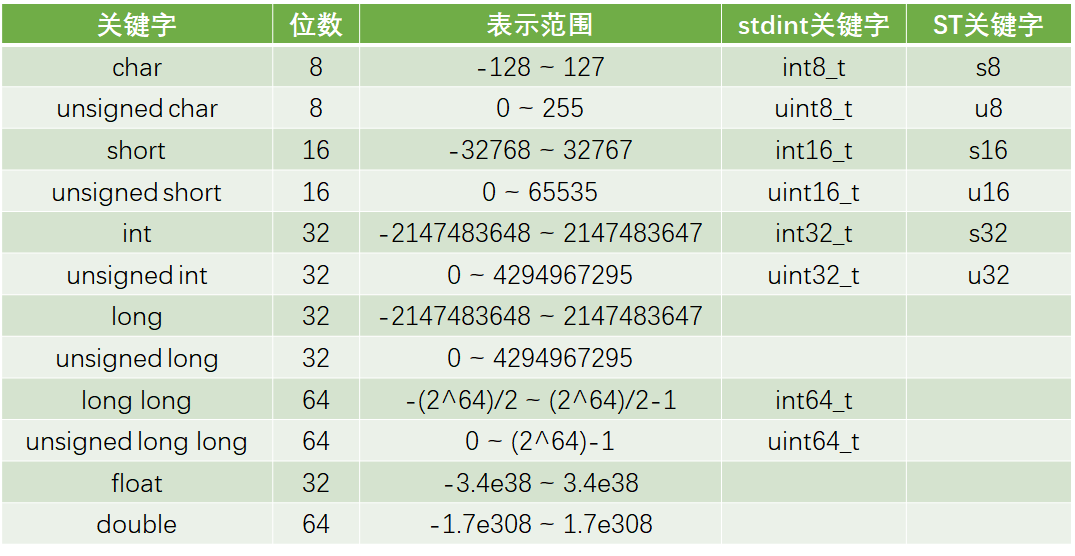
C语言数据类型
C语言宏定义
关键字:#define
用途:用一个字符串代替一个数字,便于理解,防止出错;提取程序中经常出现的参数,便于快速修改
定义宏定义:
#define ABC 12345
引用宏定义:
int a = ABC; //等效于int a = 12345;
C语言typedef
关键字:typedef
用途:将一个比较长的变量类型名换个名字,便于使用
定义typedef:
typedef unsigned char uint8_t;
引用typedef:
uint8_t a; //等效于unsigned char a;
C语言结构体
关键字:struct
用途:数据打包,不同类型变量的集合
因为结构体变量类型较长,所以通常用typedef更改变量类型名引用结构体成员:
typedef struct{
char x;
int y;
float z;
} StructName_t;
C语言枚举
关键字:enum
用途:定义一个取值受限制的整型变量,用于限制变量取值范围;宏定义的集合
定义枚举变量:
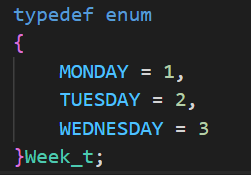
因为枚举变量类型较长,所以通常用typedef更改变量类型名引用枚举成员:

代码部分
配置流程
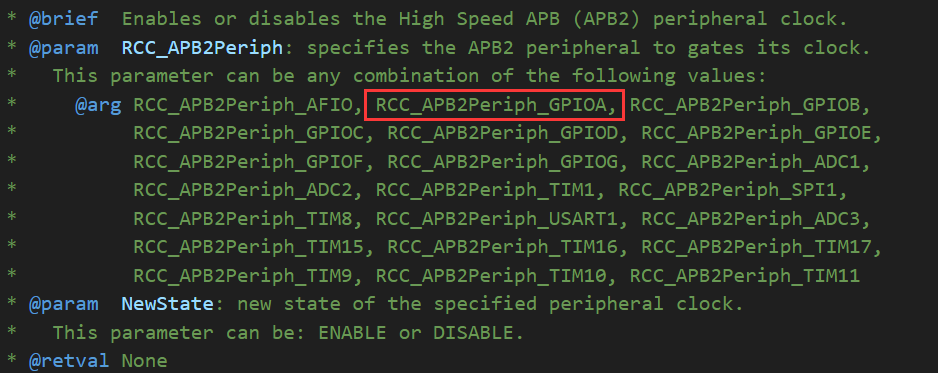
1、时钟开启;
2、配置端口。
GPIO配置部分
1 // 时钟开启
2 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
3
4 // 配置端口
5 GPIO_InitTypeDef GPIO_InitStruct;
6 GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出
7 GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
8 GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
9 GPIO_Init(GPIOA, &GPIO_InitStruct);为什么要用APB2,可以点击RCC_APB2PeriphClockCmd查看定义,可以看到,所以用APB2。