Three.js相机模拟
有没有想过如何在 3D Web 应用程序中模拟物理相机? 在这篇博文中,我将向你展示如何使用 Three.js和 OpenCV 来完成此操作。 我们将从模拟针孔相机模型开始,然后添加真实的镜头畸变。 具体来说,我们将仔细研究 OpenCV 的两个失真模型,并使用后处理着色器复制它们。
拥有逼真的模拟相机可以让你在真实相机捕获的图像上渲染 3D 场景。 例如,这可以用于增强现实,也可以用于机器人和自动驾驶车辆。 这是因为机器人和自动驾驶汽车通常结合了 3D 传感器(如激光雷达)和摄像头,在摄像头图像上可视化 3D 数据对于验证传感器校准非常重要。 在创建和检查 3D 标注时它也非常有帮助,这就是我在 Segments.ai 上解决这个问题的原因。
为了测试我们的相机模拟,我们将使用 nuScenes 数据集中的帧,将激光雷达捕获的 3D 点云放置在相机图像的顶部。 无论你是从事机器人/AV 工作、开发可视化工具、开发 AR 应用程序,还是只是对计算机视觉和 3D 图形感兴趣,本指南都希望能教会你一些新知识。 那么让我们开始吧!
1、针孔相机模型
为了以 3D 方式复制相机,我们首先需要一种以数学方式表示相机的方法,即相机模型。 从根本上来说,相机将 3D 世界点映射到 2D 图像平面。 因此,我们寻找一个输入3D 点 [x y z] 输出2D点 [u v]的函数(通常以像素坐标定义)。
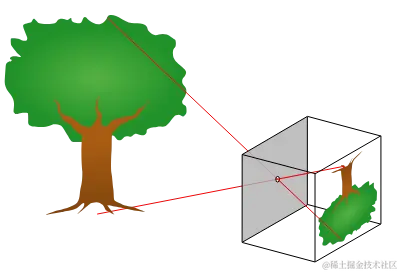
最简单的相机模型是针孔相机模型。 针孔相机没有镜头; 光只是通过一个点