世界坐标系,相机坐标系,像素坐标系转换 详细说明(附代码)
几个坐标系介绍,相机内外参的回顾参考此文。
本文主要说明如何在几个坐标系之间转换。
本文涉及:
- 使用相机内参 在 像素坐标系 和 相机坐标系 之间转换。
- 使用相机外参(位姿)在相机坐标系 和 世界坐标系 之间转换。
- (qw,qx,qy,qz,tx,ty,tz)形式的外参如何使用。
- 以具体情景为例,每一步详细说明,并结合代码进一步理解每个步骤。
以下面的情景为例。
假设 I1 (img1) 上有一点p1,现在要通过相机1,相机2的内外参把p1映射到 I2 (img2)上的对应点p2.
还需要知道p1的深度,假设有img1的深度图,可以读取p1处的深度。
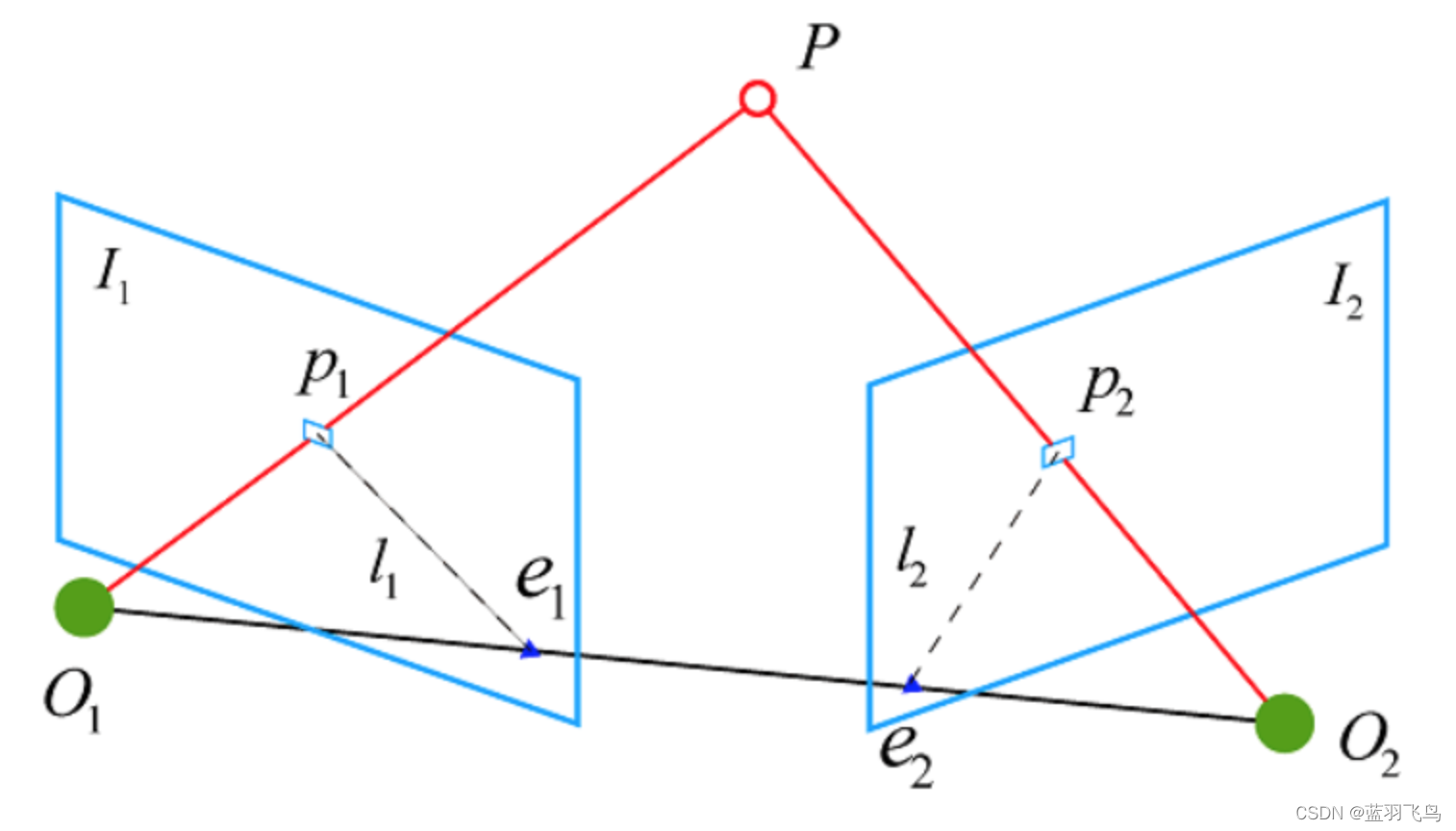
整体思路:
p1在图片 I1 上,是像素坐标系,根据camera1的内参把它转到camera1的相机坐标系,得到(xc1, yc1, zc1),
根据camera1的外参把 (xc1, yc1, zc1) 转到 世界坐标系,得到上图中的P点坐标(xw1, yw1, zw1),
根据camera2的外参把P点 (xw1, yw1, zw1) 转到camera2的相机坐标系,得到 (xc2, yc2, zc2).
最后根据camera2的内参 把 (xc2, yc2, zc2) 转到像素坐标系,得到图像 I2 上的 p2 点坐标(x2, y2).
整个坐标系的转换关系:像素1 -> 相机1 -> 世界 -> 相机2 -> 像素2
其中,像素坐标系为2D,其他都是3D。
相机外参 也 称为 位姿 (pose).
具体步骤:
(1). p1 像素坐标 --> 相机1 坐标
这两个坐标系的关系由相机内参决定,
相机内参(fx, fy, cx, cy)
假设像素坐标为(x1, y1), 相机1坐标为(xc1, yc1, zc1), 其中zc1为 I1 的深度图 (xc1, yc1)处的值,那么
x 1 = f x x c 1 z c 1 + c x x_{1} = f_{x}\frac{x_{c1}}{z_{c1}} + c_{x} x1=fxzc1xc1+cx, y 1 = f y y c 1 z c 1 + c y y_{1} = f_{y}\frac{y_{c1}}{z_{c1}} + c_{y} y1=fyzc1yc1+cy (1)
现在要求 xc1 和 yc1, 由(1)得到
x c 1 = ( x 1 − c x ) ∗ z c 1 / f x x_{c1} = (x_{1}- c_{x}) * z_{c1} / f_{x} xc1=(x1−cx)∗zc1/fx y c 1 = ( y 1 − c y ) ∗ z c 1 / f y y_{c1} = (y_{1}- c_{y}) * z_{c1} / f_{y} yc1=(y1−cy)∗zc1/fy
代码:
depth1_ori = cv2.imread("depth1.png", -1) #uint16型
depth1 = cv2.split(depth1_ori)[0]
#p1点对应的相机坐标
zc1 = depth1[y1, x1] / 1000.0 #这里深度单位是mm
xc1 = (x1 - cx) * zc1 / fx
yc1 = (y1 - cy) * zc1 / fy
(2). p1 的相机1 坐标 --> 世界坐标
转换关系: 相机坐标 = T * 世界坐标, 世界坐标 = T-1 * 相机坐标
其中 T 为world -> camera的转换矩阵。
如何求得转换矩阵 T ?先从概念介绍开始,
旋转矩阵R :3 * 3矩阵
平移向量 t : 3 * 1矩阵
把R 和 t 拼成转换矩阵 T :4 * 4矩阵,
T = [ R t 0 T 1 ] T = \begin{bmatrix} R & t\\ 0^{T}&1 \end{bmatrix} T=[R0Tt1]
顺便提一下李群李代数,T是SE(3), R是SO(3).
话题回到坐标,(xc1, yc1, zc1)为相机1坐标,(xw, yw, zw) 为世界坐标,那么世界坐标转相机坐标为:
[ x c 1 y c 1 z c 1 1 ] = T ⋅ [ x w y w z w 1 ] \begin{bmatrix} x_{c1} \\ y_{c1}\\ z_{c1}\\ 1 \end{bmatrix} = T \cdot \begin{bmatrix} x_{w} \\ y_{w}\\ z_{w}\\ 1 \end{bmatrix} xc1yc1zc11 =T⋅ xwywzw1
你肯定很好奇,为什么要加一维呢?
如果 T T T 不加最后一行的 [ 0 T 1 ] \begin{bmatrix} 0^{T}&1 \end{bmatrix} [0T1],坐标也不加最后一维的1,直接 T = [ R t ] T = \begin{bmatrix} R & t \end{bmatrix} T=[Rt] 也能计算,为什么一定要加一维?
[ x c y c z c ] = T ⋅ [ x w y w z w ] \begin{bmatrix} x_{c} \\ y_{c}\\ z_{c} \end{bmatrix} = T \cdot \begin{bmatrix} x_{w} \\ y_{w}\\ z_{w} \end{bmatrix} xcyczc =T⋅ xwywzw , 这里 T = [ R t ] T = \begin{bmatrix}R & t\end{bmatrix} T=[Rt]
是这样的,现在是从 世界坐标 转 相机1坐标 ,如果要把 相机1坐标 转 世界坐标 呢?
(我们现在要做的就是把 p1的 相机1坐标 转到 世界坐标。)
那就需要这么计算了,
[ x w y w z w ] = T − 1 ⋅ [ x c y c z c ] \begin{bmatrix} x_{w} \\ y_{w}\\ z_{w} \end{bmatrix} = T^{-1}\cdot \begin{bmatrix} x_{c} \\ y_{c}\\ z_{c} \end{bmatrix} xwywzw =T−1⋅ xcyczc ,这里 T = [ R t ] T = \begin{bmatrix}R & t\end{bmatrix} T=[Rt],无法求逆矩阵
求 T 的逆矩阵,T 必须是square(行数 = 列数)的,不能是3 * 4, 必须是4 * 4的。
所以加上一行,凑成 4 * 4 矩阵
T = [ R t 0 T 1 ] T = \begin{bmatrix} R & t\\ 0^{T}&1 \end{bmatrix} T=[R0Tt1]
那么 相机坐标 --> 世界坐标 就变为:
[ x w y w z w 1 ] = T − 1 ⋅ [ x c y c z c 1 ] \begin{bmatrix} x_{w} \\ y_{w}\\ z_{w}\\ 1 \end{bmatrix} = T^{-1} \cdot \begin{bmatrix} x_{c} \\ y_{c}\\ z_{c}\\ 1 \end{bmatrix} xwywzw1 =T−1⋅ xcyczc1
有的程序中会使用Twc, Tcw这样的称呼,这里w指world, 是世界坐标,c指camera, 是相机坐标。
T表示转换矩阵,至于Twc 是world转camera 还是camera转world, 需要根据实际情况而定(每个开发者习惯不一样)。
实际中,到了这里估计还是不知如何计算 T,问题在哪呢?
我们拿到的 相机外参 一般会是一个四元数+平移向量的形式,其中并没有R矩阵。
相机外参:(qw, qx, qy, qz, tx, ty, tz), (这个顺序要根据实际情况而定,有的相机顺序并不是这样)。
这里用四元数 q = (qw, qx, qy, qz) 代替了R矩阵,
原因在于R是3 * 3矩阵,有9个量,而一次旋转只有3个自由度,这种表达方式是冗余的,四元数的表达更紧凑。
上面是涉及到的相关概念,现在开始计算T。
计算转换矩阵 T
现在要先把 q 转为 R,再由R, t 得到T。
q = (qw, qx, qy, qz), (一定是qw, qx, qy ,qz的顺序,不是的先调整到这个顺序)
t = (tx, ty, tz), 这里要注意t 的单位,如果是mm, 需要 / 1000.0.
如果用Eigen库,可以这么得到T,
Isometry3d是4 * 4 欧式变换矩阵,就是T的格式(参考)
Eigen::Quaterniond q(qw, qx, qy, qz);
Eigen::Isometry3d T(q);
//先设置的旋转矩阵,下面平移要在旋转前的坐标系上平移,所以是pretranslate
T.pretranslate(Eigen::Vector3d(tx, ty, tz));
如果用Sophus::SE3d
SE3d T = SE3d(Quaterniond(qw, qx, qy, qz),Vector3d(tx, ty, tz)));
直接计算的话,由四元数 q 到旋转矩阵 R 的公式为(转此处的图):
这里q0, q1, q2, q3分别对应 qw, qx, qy, qz.
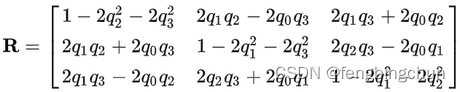
结合 (tx, ty, tz), 下面再加一行 [ 0 T 1 ] \begin{bmatrix} 0^{T}&1 \end{bmatrix} [0T1],得到T1 (由相机1的外参得到)。
T1 = np.array([[1 - 2 * q2 ** 2 - 2 * q3 ** 2,2 * q1 * q2 - 2 * q0 * q3,2 * q1 * q3 + 2 * q0 * q2,tx, #注意单位,如果是mm,要/1000.0],[2 * q1 * q2 + 2 * q0 * q3,1 - 2 * q1 ** 2 - 2 * q3 ** 2,2 * q2 * q3 - 2 * q0 * q1,ty, #注意单位,如果是mm,要/1000.0],[2 * q1 * q3 - 2 * q0 * q2,2 * q2 * q3 + 2 * q0 * q1,1 - 2 * q1 ** 2 - 2 * q2 ** 2,tz, #注意单位,如果是mm,要/1000.0],[0,0,0,1],])
已经得到了T1,下面可把相机坐标转为世界坐标
[ x w y w z w 1 ] = T 1 − 1 ⋅ [ x c 1 y c 1 z c 1 1 ] \begin{bmatrix} x_{w} \\ y_{w}\\ z_{w}\\ 1 \end{bmatrix} = T_{1}^{-1} \cdot \begin{bmatrix} x_{c1} \\ y_{c1}\\ z_{c1}\\ 1 \end{bmatrix} xwywzw1 =T1−1⋅ xc1yc1zc11
代码:
p1_c = np.array([xc1, yc1, zc1, 1])
p_w = np.matmul(np.linalg.inv(T1), np.expand_dims(p1_c,1))
(3). 世界坐标 --> 相机2坐标
上面已经说明了如何由 世界坐标 转 相机坐标。
注意上面求的T1 是由相机1的外参得到,
这里要用到相机2的外参,camera2: (qw2, qx2, qy2, qz2, tx2, ty2, tz2),
求得T2 后,由下式得到 P 的相机2坐标
[ x c 2 y c 2 z c 2 1 ] = T 2 ⋅ [ x w y w z w 1 ] \begin{bmatrix} x_{c2} \\ y_{c2}\\ z_{c2}\\ 1 \end{bmatrix} = T_{2} \cdot \begin{bmatrix} x_{w} \\ y_{w}\\ z_{w}\\ 1 \end{bmatrix} xc2yc2zc21 =T2⋅ xwywzw1
p2_c = np.matmul(T2, p_w)
(4) 相机2坐标 --> 像素坐标2
相机内参(fx, fy, cx, cy)
x 2 = f x x c 2 z c 2 + c x x_{2} = f_{x}\frac{x_{c2}}{z_{c2}} + c_{x} x2=fxzc2xc2+cx, y 2 = f y y c 2 z c 2 + c y y_{2} = f_{y}\frac{y_{c2}}{z_{c2}} + c_{y} y2=fyzc2yc2+cy
xc2 = p2_c[0]
yc2 = p2_c[1]
zc2 = p2_c[2]
x2 = xc2 * fx / zc2 + cx
y2 = yc2 * fy / zc2 + cy
这样就得到了图像 I2 上的映射点 p2的坐标。