【Proteus仿真】【51单片机】公交车报站系统
文章目录
- 一、功能简介
- 二、软件设计
- 三、实验现象
- 联系作者
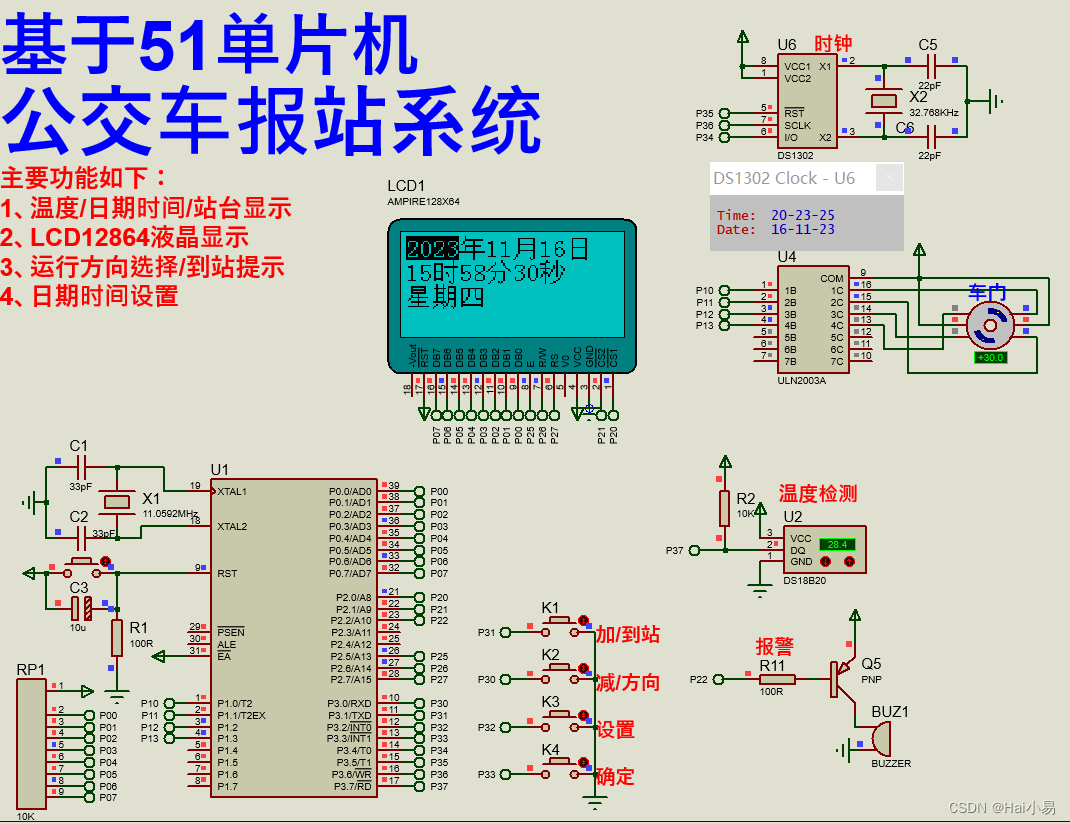
一、功能简介
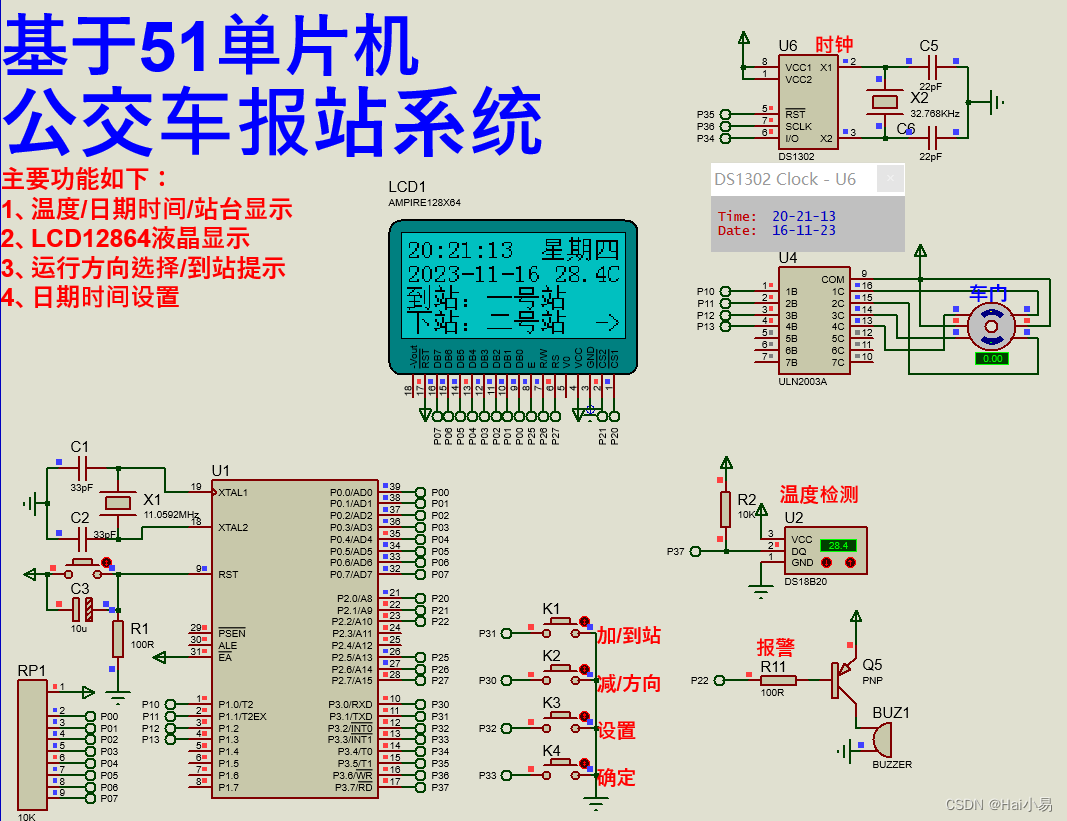
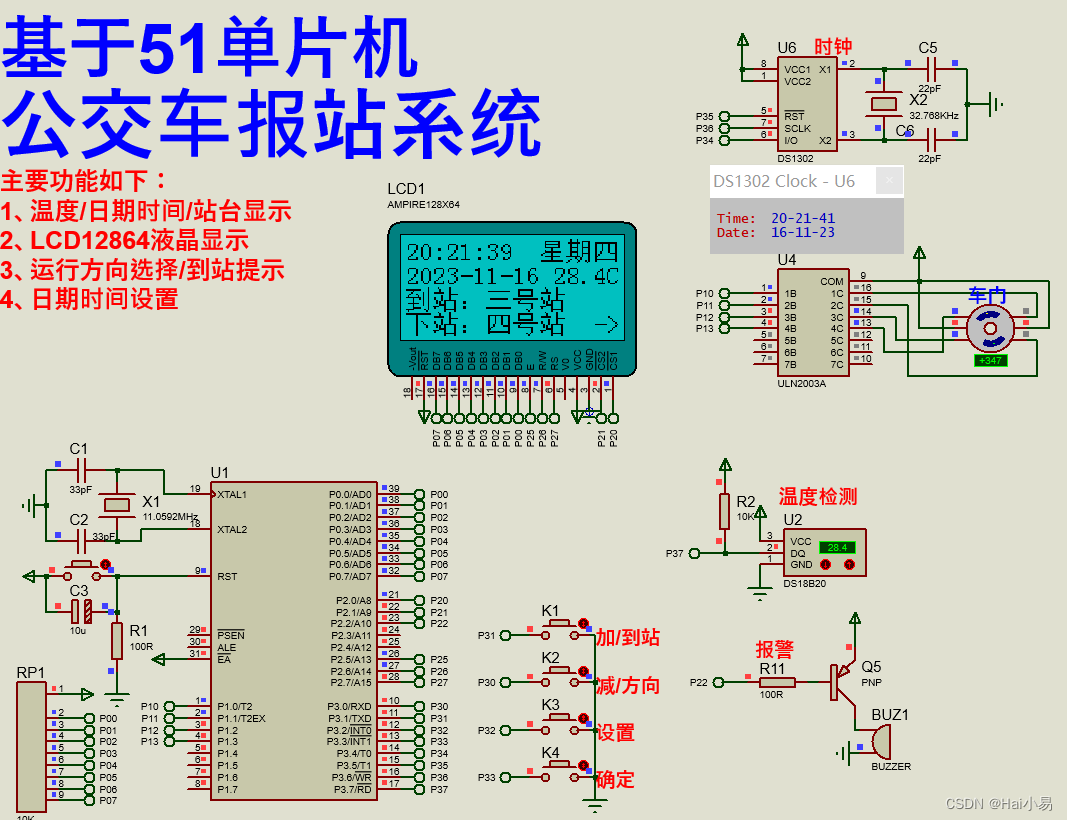
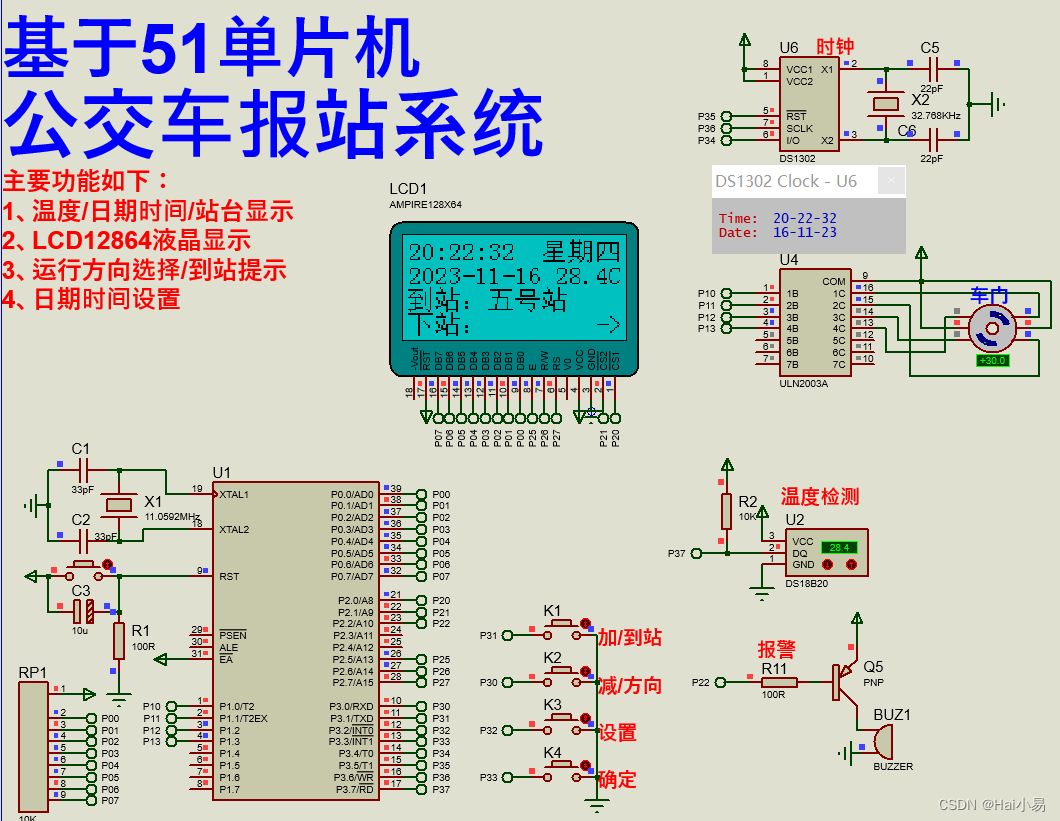
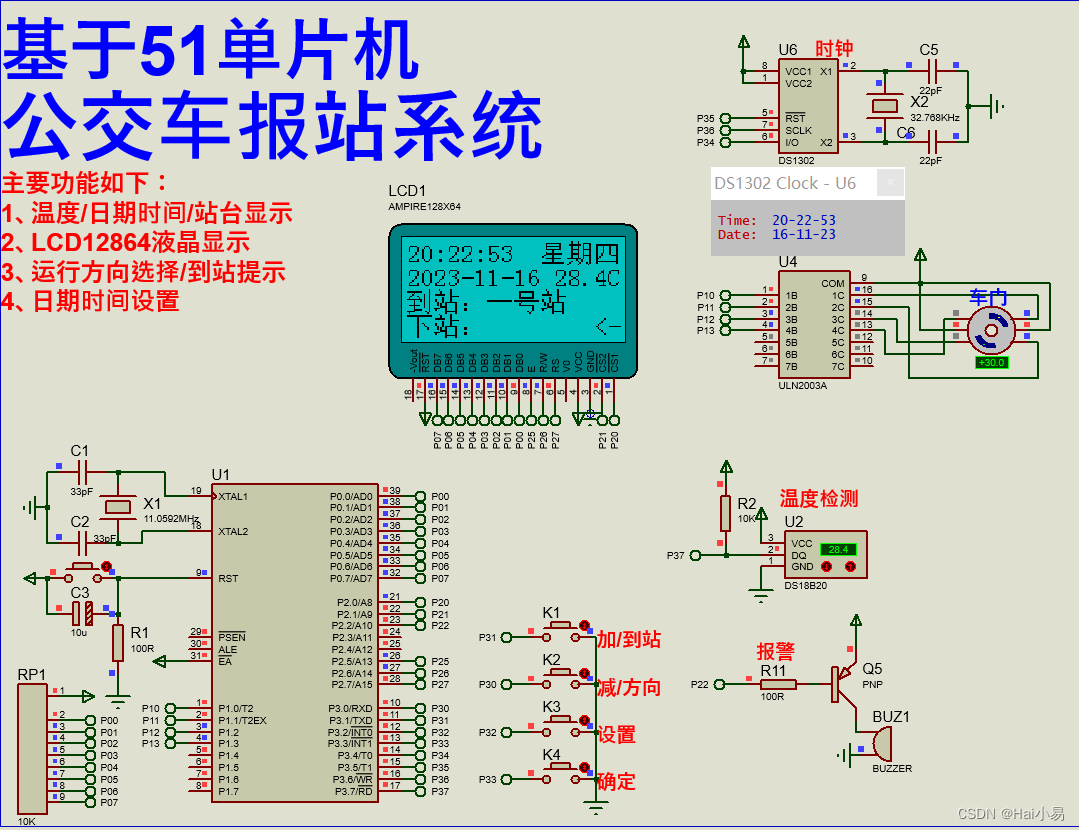
本项目使用Proteus8仿真51单片机控制器,使用LCD12864显示模块、DS18B20温度传感器、DS1302时钟模块、按键、LED蜂鸣器、ULN2003、28BYJ48步进电机模块等。
主要功能:
系统运行后,LCD12864液晶显示检测温度、日期时间、站台信息和运行方向;可按下K3键进入设置模式,默认调节年份,可再次按下K3键选择年月日时分秒星期,选择后可按下K1和K2键调节,按下K4键可保存时间并返回主界面。当到站后可按下K1键报站,显示屏显示当前站和下一站信息,并且蜂鸣器发出提示音,步进电机正反转控制门开关。可按下K2键切换运行方向,系统默认为下行。
二、软件设计
/*
作者:嗨小易(QQ:3443792007)*///系统数据显示
void sys_data_show(void)
{u8 buf[11];while(1){//正常模式显示if(sys_ctrl.mode==0){//日期显示buf[0]='2';buf[1]='0';buf[2]=gDS1302_TIME[6]/16+0x30;buf[3]=gDS1302_TIME[6]%16+0x30;buf[4]='-';buf[5]=gDS1302_TIME[4]/16+0x30;buf[6]=gDS1302_TIME[4]%16+0x30;buf[7]='-';buf[8]=gDS1302_TIME[3]/16+0x30;buf[9]=gDS1302_TIME[3]%16+0x30;buf[10]='\0';lcd12864_show_string(0,1,buf,0);//时间显示buf[0]=gDS1302_TIME[2]/16+0x30;buf[1]=gDS1302_TIME[2]%16+0x30;buf[2]=':';buf[3]=gDS1302_TIME[1]/16+0x30;buf[4]=gDS1302_TIME[1]%16+0x30;buf[5]=':';buf[6]=gDS1302_TIME[0]/16+0x30;buf[7]=gDS1302_TIME[0]%16+0x30;buf[8]='\0';lcd12864_show_string(0,0,buf,0);//星期显示lcd12864_show_hz(14,0,gDS1302_TIME[5]+1);//温度显示buf[0]=sys_ctrl.temp/100+0x30;buf[1]=sys_ctrl.temp%100/10+0x30;buf[2]='.';buf[3]=sys_ctrl.temp%100%10+0x30;buf[4]='\0';lcd12864_show_string(11,1,buf,0);//运行方向if(sys_ctrl.dir==0)lcd12864_show_string(14,3,"->",0);else lcd12864_show_string(14,3,"<-",0);//站点显示//下行if(sys_ctrl.dir==0){switch(sys_ctrl.num){case 0:lcd12864_show_hz(8,3,17,0);//重新显示之前清屏的那块字lcd12864_show_hz(10,3,15,0);lcd12864_show_hz(6,2,3,0);//一号站lcd12864_show_hz(6,3,4,0);//二号站break;case 1:lcd12864_show_hz(6,2,4,0);//二号站lcd12864_show_hz(6,3,5,0);//三号站break;case 2:lcd12864_show_hz(6,2,5,0);//三号站lcd12864_show_hz(6,3,6,0);//四号站break;case 3:lcd12864_show_hz(6,2,6,0);//四号站lcd12864_show_hz(6,3,7,0);//五号站break;case 4:lcd12864_show_hz(6,2,7,0);//五号站lcd12864_show_string(6,3," ",0);break;} }//上行else{switch(sys_ctrl.num){case 0:lcd12864_show_hz(8,3,17,0);//重新显示之前清屏的那块字lcd12864_show_hz(10,3,15,0);lcd12864_show_hz(6,2,7,0);//五号站lcd12864_show_hz(6,3,6,0);//四号站break;case 1:lcd12864_show_hz(6,2,6,0);//四号站lcd12864_show_hz(6,3,5,0);//三号站break;case 2:lcd12864_show_hz(6,2,5,0);//三号站lcd12864_show_hz(6,3,4,0);//二号站break;case 3:lcd12864_show_hz(6,2,4,0);//二号站lcd12864_show_hz(6,3,3,0);//一号站break;case 4:lcd12864_show_hz(6,2,3,0);//一号站lcd12864_show_string(6,3," ",0);break;} }}//设置模式显示else{switch(sys_ctrl.mode){case 1://年lcd12864_show_hz(4,2,sys_ctrl.set_time[5]+1,0);buf[0]='2';buf[1]='0';buf[2]=sys_ctrl.set_time[6]/16+0x30;buf[3]=sys_ctrl.set_time[6]%16+0x30;buf[4]='\0';lcd12864_show_string(0,0,buf,1);break;case 2://月buf[0]='2';buf[1]='0';buf[2]=sys_ctrl.set_time[6]/16+0x30;buf[3]=sys_ctrl.set_time[6]%16+0x30;buf[4]='\0';lcd12864_show_string(0,0,buf,0);buf[0]=sys_ctrl.set_time[4]/16+0x30;buf[1]=sys_ctrl.set_time[4]%16+0x30;buf[2]='\0';lcd12864_show_string(6,0,buf,1);break;case 3://日buf[0]='2';buf[1]='0';buf[2]=sys_ctrl.set_time[6]/16+0x30;buf[3]=sys_ctrl.set_time[6]%16+0x30;buf[4]='\0';lcd12864_show_string(0,0,buf,0);buf[0]=sys_ctrl.set_time[4]/16+0x30;buf[1]=sys_ctrl.set_time[4]%16+0x30;buf[2]='\0';lcd12864_show_string(6,0,buf,0);buf[0]=sys_ctrl.set_time[3]/16+0x30;buf[1]=sys_ctrl.set_time[3]%16+0x30;buf[2]='\0';lcd12864_show_string(10,0,buf,1);break;case 4://时buf[0]='2';buf[1]='0';buf[2]=sys_ctrl.set_time[6]/16+0x30;buf[3]=sys_ctrl.set_time[6]%16+0x30;buf[4]='\0';lcd12864_show_string(0,0,buf,0);buf[0]=sys_ctrl.set_time[4]/16+0x30;buf[1]=sys_ctrl.set_time[4]%16+0x30;buf[2]='\0';lcd12864_show_string(6,0,buf,0);buf[0]=sys_ctrl.set_time[3]/16+0x30;buf[1]=sys_ctrl.set_time[3]%16+0x30;buf[2]='\0';lcd12864_show_string(10,0,buf,0);buf[0]=sys_ctrl.set_time[2]/16+0x30;buf[1]=sys_ctrl.set_time[2]%16+0x30;buf[2]='\0';lcd12864_show_string(0,1,buf,1);break;case 5://分buf[0]='2';buf[1]='0';buf[2]=sys_ctrl.set_time[6]/16+0x30;buf[3]=sys_ctrl.set_time[6]%16+0x30;buf[4]='\0';lcd12864_show_string(0,0,buf,0);buf[0]=sys_ctrl.set_time[4]/16+0x30;buf[1]=sys_ctrl.set_time[4]%16+0x30;buf[2]='\0';lcd12864_show_string(6,0,buf,0);buf[0]=sys_ctrl.set_time[3]/16+0x30;buf[1]=sys_ctrl.set_time[3]%16+0x30;buf[2]='\0';lcd12864_show_string(10,0,buf,0);buf[0]=sys_ctrl.set_time[2]/16+0x30;buf[1]=sys_ctrl.set_time[2]%16+0x30;buf[2]='\0';lcd12864_show_string(0,1,buf,0);buf[0]=sys_ctrl.set_time[1]/16+0x30;buf[1]=sys_ctrl.set_time[1]%16+0x30;buf[2]='\0';lcd12864_show_string(4,1,buf,1);break;case 6://秒buf[0]='2';buf[1]='0';buf[2]=sys_ctrl.set_time[6]/16+0x30;buf[3]=sys_ctrl.set_time[6]%16+0x30;buf[4]='\0';lcd12864_show_string(0,0,buf,0);buf[0]=sys_ctrl.set_time[4]/16+0x30;buf[1]=sys_ctrl.set_time[4]%16+0x30;buf[2]='\0';lcd12864_show_string(6,0,buf,0);buf[0]=sys_ctrl.set_time[3]/16+0x30;buf[1]=sys_ctrl.set_time[3]%16+0x30;buf[2]='\0';lcd12864_show_string(10,0,buf,0);buf[0]=sys_ctrl.set_time[2]/16+0x30;buf[1]=sys_ctrl.set_time[2]%16+0x30;buf[2]='\0';lcd12864_show_string(0,1,buf,0);buf[0]=sys_ctrl.set_time[1]/16+0x30;buf[1]=sys_ctrl.set_time[1]%16+0x30;buf[2]='\0';lcd12864_show_string(4,1,buf,0);buf[0]=sys_ctrl.set_time[0]/16+0x30;buf[1]=sys_ctrl.set_time[0]%16+0x30;buf[2]='\0';lcd12864_show_string(8,1,buf,1);break;case 7://星期buf[0]='2';buf[1]='0';buf[2]=sys_ctrl.set_time[6]/16+0x30;buf[3]=sys_ctrl.set_time[6]%16+0x30;buf[4]='\0';lcd12864_show_string(0,0,buf,0);buf[0]=sys_ctrl.set_time[4]/16+0x30;buf[1]=sys_ctrl.set_time[4]%16+0x30;buf[2]='\0';lcd12864_show_string(6,0,buf,0);buf[0]=sys_ctrl.set_time[3]/16+0x30;buf[1]=sys_ctrl.set_time[3]%16+0x30;buf[2]='\0';lcd12864_show_string(10,0,buf,0);buf[0]=sys_ctrl.set_time[2]/16+0x30;buf[1]=sys_ctrl.set_time[2]%16+0x30;buf[2]='\0';lcd12864_show_string(0,1,buf,0);buf[0]=sys_ctrl.set_time[1]/16+0x30;buf[1]=sys_ctrl.set_time[1]%16+0x30;buf[2]='\0';lcd12864_show_string(4,1,buf,0);buf[0]=sys_ctrl.set_time[0]/16+0x30;buf[1]=sys_ctrl.set_time[0]%16+0x30;buf[2]='\0';lcd12864_show_string(8,1,buf,0);lcd12864_show_hz(4,2,sys_ctrl.set_time[5]+1,1);break; } } break;}
}//门的开关动作
void _door_open_close(void)
{u8 i=3;while(i--){step_motor_28BYJ48_send_pulse(4,0,80,1,1);}delay_ms(1000);i=3;while(i--){step_motor_28BYJ48_send_pulse(4,1,80,1,1);}
}//应用控制系统
void appdemo_show(void)
{u8 i=10;sys_parm_init();//系统参数初始化lcd12864_init();
// ds1302_init();ds18b20_init();//间隔一段时间,等待数据稳定while(i--){//温度获取sys_ctrl.temp=ds18b20_read_temperture()*10;delay_ms(100); }sys_open_show();//系统开机界面显示 while(1){ sys_data_get();//系统数据获取sys_data_show();//系统数据显示sys_data_set();//系统数据设置sys_fun_ctrl();//系统功能控制}
}三、实验现象
B站演示视频:https://space.bilibili.com/444388619
联系作者
视频地址:https://space.bilibili.com/444388619/video
专注于51单片机、STM32、国产32、DSP、Proteus、arduino、ESP32、物联网软件开发,PCB设计,视频分享,技术交流。