【LeetCode】剑指 Offer(11)
目录
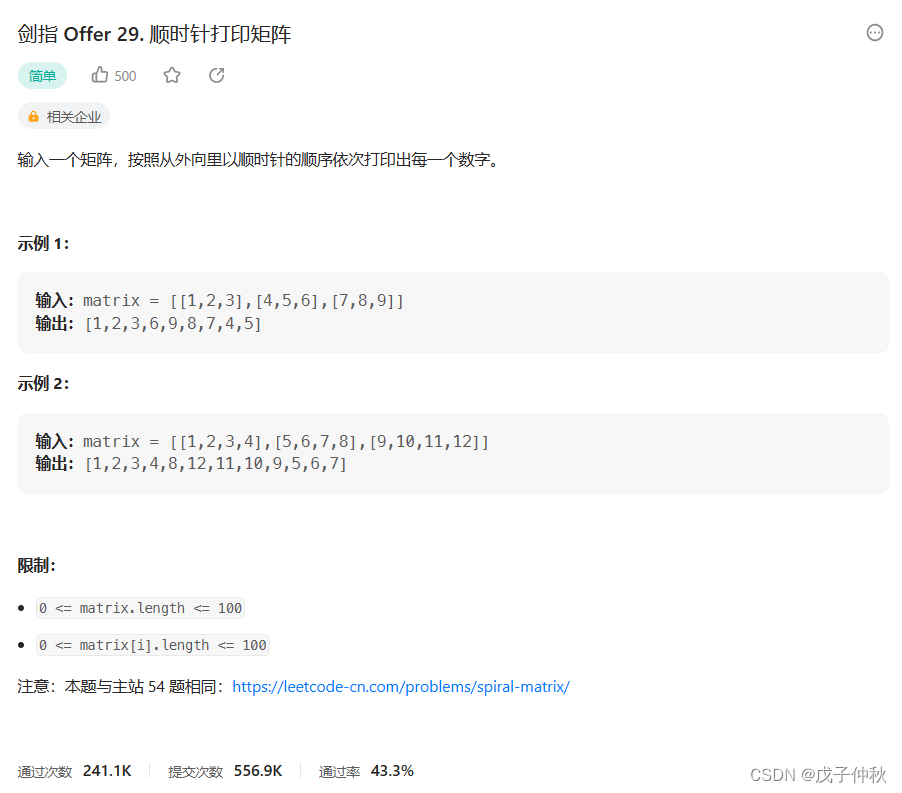
题目:剑指 Offer 29. 顺时针打印矩阵 - 力扣(Leetcode)
题目的接口:
解题思路:
代码:
过啦!!!
写在最后:
题目:剑指 Offer 29. 顺时针打印矩阵 - 力扣(Leetcode)
题目的接口:
class Solution {
public:vector<int> spiralOrder(vector<vector<int>>& matrix) {}
};解题思路:
这道题的思路也比较简单,
就是实现起来对边界的控制能力要求比较高,
根据题意顺时针打印矩阵,
先判断该矩阵是否为空;
然后,
我们通过控制上右下左四个边界打印。
(设置四个变量作为下标访问矩阵)
根据这个顺序循环:
打印上边界的值,然后更新上边界;
打印右边界的值,然后更新右边界;
打印下边界的值,然后更新下边界;
打印左边界的值,然后更新左边界;
每次打印完都判断矩阵是否已经打印完成,
如果矩阵已经打印完成,就跳出循环,
返回打印的值即可。
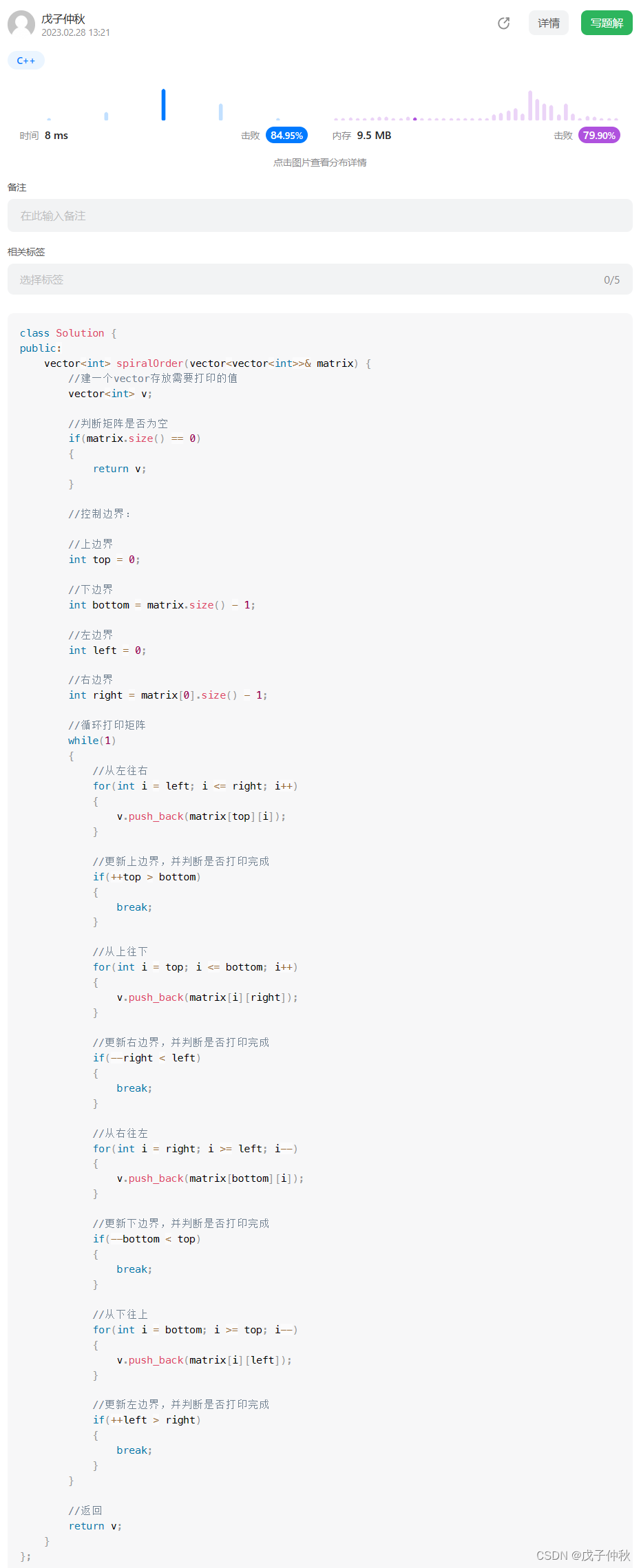
代码:
class Solution {
public:vector<int> spiralOrder(vector<vector<int>>& matrix) {//建一个vector存放需要打印的值vector<int> v;//判断矩阵是否为空if(matrix.size() == 0){return v;}//控制边界://上边界int top = 0;//下边界int bottom = matrix.size() - 1;//左边界int left = 0;//右边界int right = matrix[0].size() - 1;//循环打印矩阵while(1){//从左往右for(int i = left; i <= right; i++){v.push_back(matrix[top][i]);}//更新上边界,并判断是否打印完成if(++top > bottom){break;}//从上往下for(int i = top; i <= bottom; i++){v.push_back(matrix[i][right]);}//更新右边界,并判断是否打印完成if(--right < left){break;}//从右往左for(int i = right; i >= left; i--){v.push_back(matrix[bottom][i]);}//更新下边界,并判断是否打印完成if(--bottom < top){break;}//从下往上for(int i = bottom; i >= top; i--){v.push_back(matrix[i][left]);}//更新左边界,并判断是否打印完成if(++left > right){break;} }//返回return v;}
};过啦!!!
写在最后:
以上就是本篇文章的内容了,感谢你的阅读。
如果喜欢本文的话,欢迎点赞和评论,写下你的见解。
如果想和我一起学习编程,不妨点个关注,我们一起学习,一同成长。
之后我还会输出更多高质量内容,欢迎收看。