RT-Thread STM32F407 定时器
定时器简介
硬件定时器一般有 2 种工作模式,定时器模式和计数器模式。不管是工作在哪一种模式,实质都是通过内部计数器模块对脉冲信号进行计数。下面是定时器的一些重要概念。
计数器模式:对外部输入引脚的外部脉冲信号计数。
定时器模式:对内部脉冲信号计数。定时器常用作定时时钟,以实现定时检测,定时响应、定时控制。
计数器:计数器可以递增计数或者递减计数。16位计数器的最大计数值为65535,32位的最大值为4294967295。
计数频率:定时器模式时,计数器单位时间内的计数次数,由于系统时钟频率是定值,所以可以根据计数器的计数值计算出定时时间,定时时间 = 计数值 / 计数频率。例如计数频率为 1MHz,计数器计数一次的时间则为 1 / 1000000, 也就是每经过 1 微秒计数器加一(或减一),此时 16 位计数器的最大定时能力为 65535 微秒,即 65.535 毫秒。
- 第一步,首先在 RT-Thread Settings中进行配置

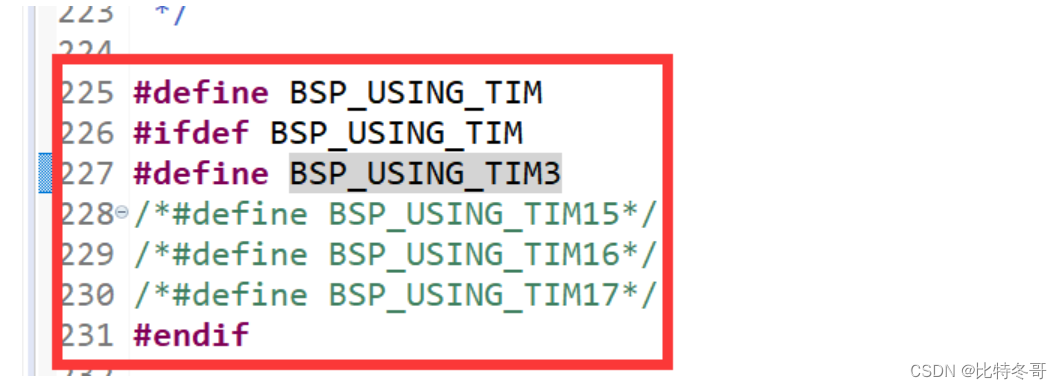
- 第二步,退出RT-Thread Settings,进入board.h,定义宏
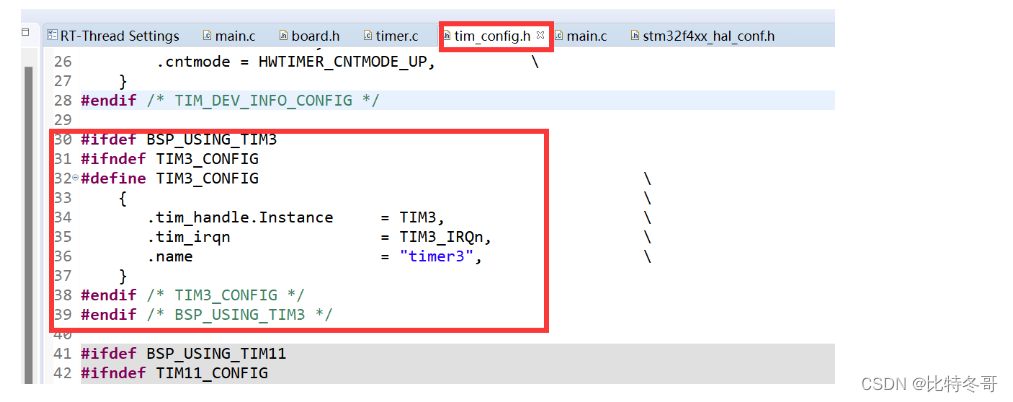
- 第三步,进入tim_config.h,增加或修改定时器相关宏
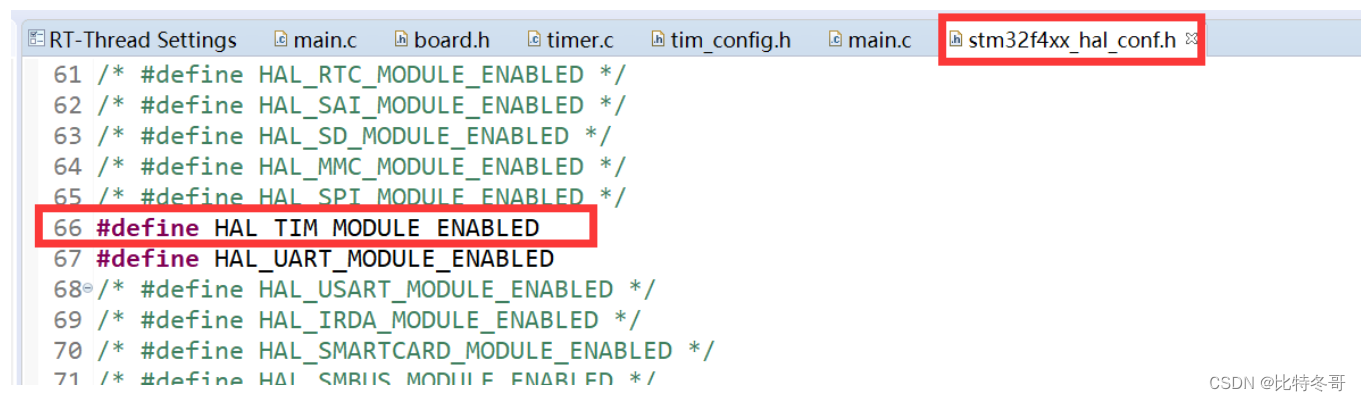
- 第四步,进入stm32f4xx_hal_conf.h 使能#define HAL_TIM_MODULE_ENABLED
- 第五步,回到main.c,使能定时器时钟,并找到 打开
__HAL_RCC_TIM3_CLK_ENABLE();
rt_device_t hw_dev = rt_device_find("timer3");
rt_err_t ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
- 第六步,设置超时回调函数、计数频率和计数模式、超时值并其开启定时器
rt_device_set_rx_indicate(hw_dev, timeout_cb); /* 设置超时回调函数 */ rt_device_control(hw_dev, HWTIMER_CTRL_FREQ_SET, &freq); /* 设置计数频率(若未设置该项,默认为1Mhz 或 支持的最小计数频率) */
mode = HWTIMER_MODE_PERIOD; /* 设置模式为周期性定时器(若未设置,默认是HWTIMER_MODE_ONESHOT)*/
ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
timeout_s.sec = 2; /* 秒 */
timeout_s.usec = 0; /* 微秒 */
rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s))
- 第七步,编写超时回调函数
static rt_err_t timeout_cb(rt_device_t dev, rt_size_t size)
{rt_kprintf("tick is :%d !\n", rt_tick_get()); //获取当前系统的滴答计数值rt_device_read(hw_dev, 0, &timeout_s, sizeof(timeout_s)); /* 读取定时器当前值 */rt_kprintf("Read: Sec = %d, Usec = %d\n", timeout_s.sec, timeout_s.usec);return 0;
}
综上,main.c
#include <rtthread.h>
#include <rtdbg.h>
#include <rtdevice.h>
#include <board.h>
#include "tim_config.h"#define DBG_TAG "main"
#define DBG_LVL DBG_LOG#define HWTIMER_DEV_NAME "timer3" /* 定时器名称 */rt_err_t ret = RT_EOK;
rt_hwtimerval_t timeout_s; /* 定时器超时值 */
rt_device_t hw_dev = RT_NULL; /* 定时器设备句柄 */
rt_hwtimer_mode_t mode; /* 定时器模式 */
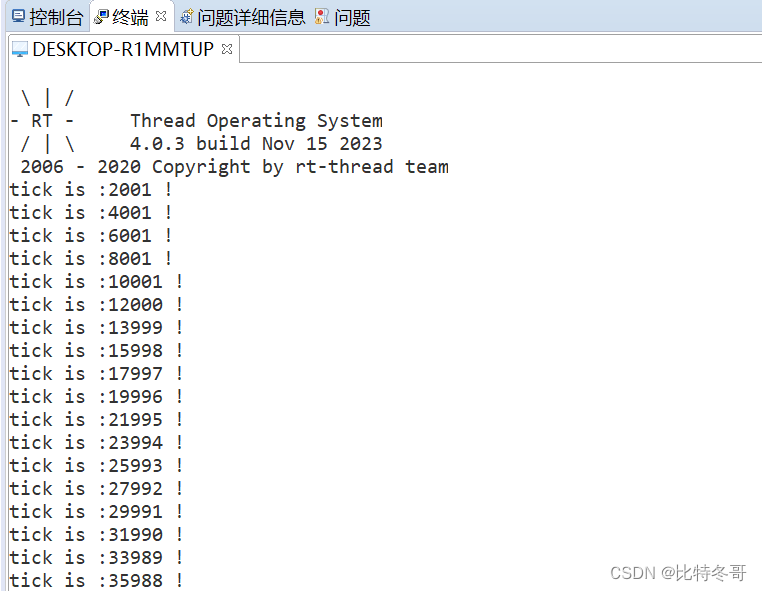
rt_uint32_t freq = 10000; /* 计数频率 *//* 定时器超时回调函数 */
static rt_err_t timeout_cb(rt_device_t dev, rt_size_t size)
{//rt_kprintf("this is hwtimer timeout callback fucntion!\n");rt_kprintf("tick is :%d !\n", rt_tick_get()); //获取当前系统的滴答计数值//rt_device_read(hw_dev, 0, &timeout_s, sizeof(timeout_s));//rt_kprintf("Read: Sec = %d, Usec = %d\n", timeout_s.sec, timeout_s.usec);return 0;
}int main(void)
{// 使用前必须先手动打开时钟__HAL_RCC_TIM3_CLK_ENABLE();/* 查找定时器设备 */hw_dev = rt_device_find(HWTIMER_DEV_NAME);if (hw_dev == RT_NULL){rt_kprintf("hwtimer sample run failed! can't find %s device!\n", HWTIMER_DEV_NAME);return RT_ERROR;}/* 以读写方式打开设备 */ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);if (ret != RT_EOK){rt_kprintf("open %s device failed!\n", HWTIMER_DEV_NAME);return ret;}/* 设置超时回调函数 */rt_device_set_rx_indicate(hw_dev, timeout_cb);/* 设置计数频率(若未设置该项,默认为1Mhz 或 支持的最小计数频率) */rt_device_control(hw_dev, HWTIMER_CTRL_FREQ_SET, &freq);/* 设置模式为周期性定时器(若未设置,默认是HWTIMER_MODE_ONESHOT)*/mode = HWTIMER_MODE_PERIOD;ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);if (ret != RT_EOK){rt_kprintf("set mode failed! ret is :%d\n", ret);return ret;}/* 设置定时器超时值为5s并启动定时器 */timeout_s.sec = 2; /* 秒 */timeout_s.usec = 0; /* 微秒 */if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s)){rt_kprintf("set timeout value failed\n");return RT_ERROR;}while(1){}return RT_EOK;
}