HDRP图形入门:HDRP渲染管线depth翻转
新项目开坑HDRP渲染管线,花了些时间把项目开发框架和图形工作流更新到最新版本,其间发现HDRP中深度信息和buildin渲染管线翻转了。
以前的buildin渲染管线,距离摄像机越近depth->0,越远depth->1,这也很好理解,离得越近距离越小,颜色值->(0,0,0,0)黑色,如下:
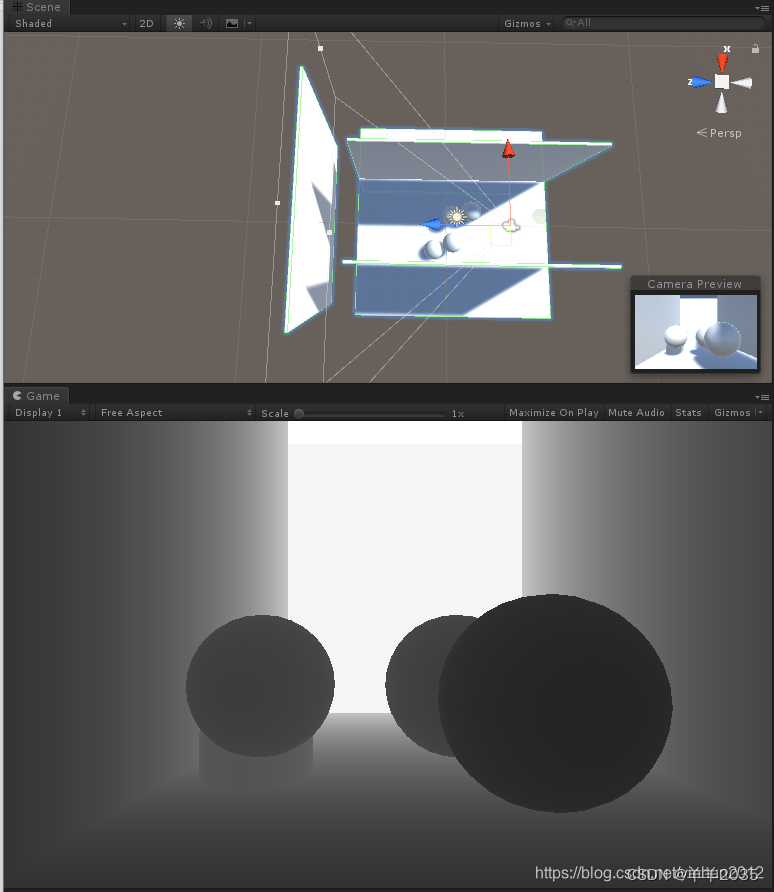
而新HDRP中,深度如下:
 可以看的出来是反过来的,也就是距离摄像机越近depth->1,越远depth->0。
可以看的出来是反过来的,也就是距离摄像机越近depth->1,越远depth->0。
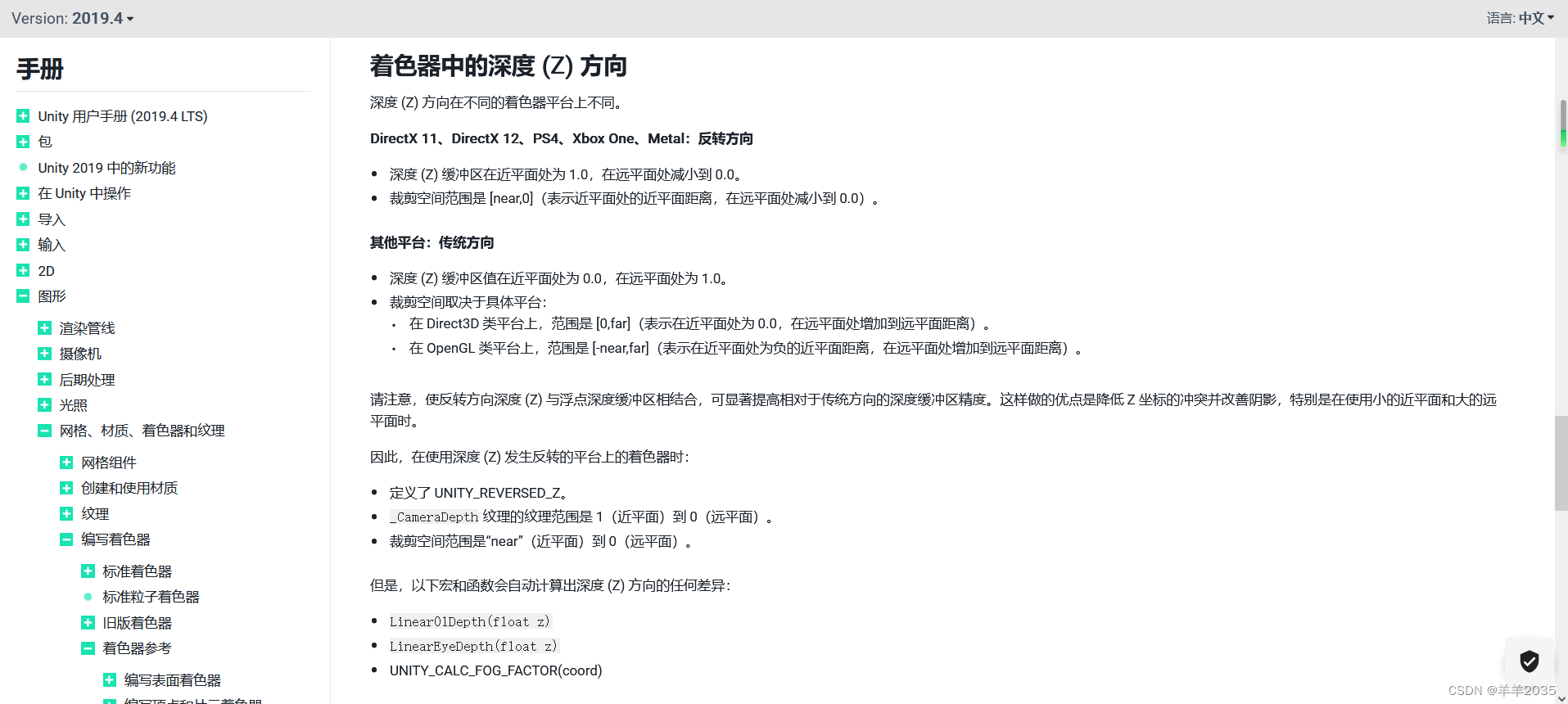
unity说是因为HDRP本身是为了支持高级图形硬件的图形语言比如hlsl设定的(比如dx和opengl的坐标系也是反的,同时uv也可能上下颠倒),当然这也不是什么大事,无非刚开始搞反了导致效果出问题,测试出来后改一改就好了。
接下来根据新的规范实现一个遮挡剔除和不剔除的外发光特效,因为以前写过外发光特效的原理,所以这里从简,只叙述一下大纲:
1.采样物体的轮廓纹理,进行纯色渲染。
2.高斯滤波进行后处理得到轮廓像素外扩的纯色渲染。
3.根据当前pixel片段所在的摄像机深度缓冲和物体轮廓纹理的深度相比较,如果片段轮廓纹理depth值更小,则代表距离摄像机更远,则被剔除渲染。
//滤波矩阵static float _GaussMatrix[9] = { 0.07511362, 0.1238414, 0.07511362, 0.1238414, 0.20418, 0.1238414, 0.07511362, 0.1238414, 0.07511362 };VaryingsEx VertBlur(AttributesEx input){VaryingsEx output;UNITY_SETUP_INSTANCE_ID(input);UNITY_INITIALIZE_VERTEX_OUTPUT_STEREO(output);//必须采样屏幕坐标output.positionCS = GetFullScreenTriangleVertexPosition(input.vertexID);//采样uv坐标,用于纹理采样output.uv = GetFullScreenTriangleTexCoord(input.vertexID);float c = 1;for(int x=0;x<3;x++){for(int y=0;y<3;y++){ output.uvs[x*3+y] = (output.uv+_CustomColorTexture_TexelSize.xy*float2((y-c)*_BlurSpread,(x-c)*_BlurSpread));}}return output;}float4 FragBlur(VaryingsEx input) : SV_Target{UNITY_SETUP_STEREO_EYE_INDEX_POST_VERTEX(input);float4 col = float4(0,0,0,0);for(int k=0;k<9;k++){col+=(CustomPassSampleCustomColor(input.uvs[k])*_GaussMatrix[k]);}col*=_Brightness;//采样上一个custompass纹理//如果纹理有颜色数据,则剔除掉,就可以显示最底层的模型渲染纹理float4 ocol = CustomPassSampleCustomColor(input.uv);if(ocol.a>0){discard;}return col;}
以上是进行高斯滤波和原始纹理裁剪得到轮廓外发光效果。
void GetSurfaceAndBuiltinData(FragInputs fragInputs, float3 viewDirection, inout PositionInputs posInput, out SurfaceData surfaceData, out BuiltinData builtinData){float2 colorMapUv = TRANSFORM_TEX(fragInputs.texCoord0.xy, _ColorMap);float4 result = SAMPLE_TEXTURE2D(_ColorMap, s_trilinear_clamp_sampler, colorMapUv);//hdrp摄像机深度值由近到远1->0深度图采样near=1,far=0//通过像素坐标xy值采样深度信息float camdepth = LoadCameraDepth(fragInputs.positionSS.xy);//当前像素深度信息由近到远//1->0float vertexdepth = posInput.deviceDepth;if(_OcclutionDiscard == 1){//如果当前像素的深度值<深度图深度值//则表示当前像素距离摄像机更远//则被剔除渲染if(vertexdepth<camdepth){discard;}}// Write back the data to the output structuresZERO_BUILTIN_INITIALIZE(builtinData); // No call to InitBuiltinData as we don't have any lightingZERO_INITIALIZE(SurfaceData, surfaceData);builtinData.opacity = result.a;builtinData.emissiveColor = float3(0, 0, 0);surfaceData.color = camdepth;}
以上是根据深度缓冲进行剔除和非剔除采样。

可以看到添加物体外发光和选择遮挡剔除完成需要的效果。
ps:因为现在更加倾向于自身健康和家庭生活,所以博客只会偶尔花最多半个小时对一些技术要点(或坑点)进行说明。