ros1 基础学习08- 实现Server端自定义四 Topic模式控制海龟运动
一、服务模型
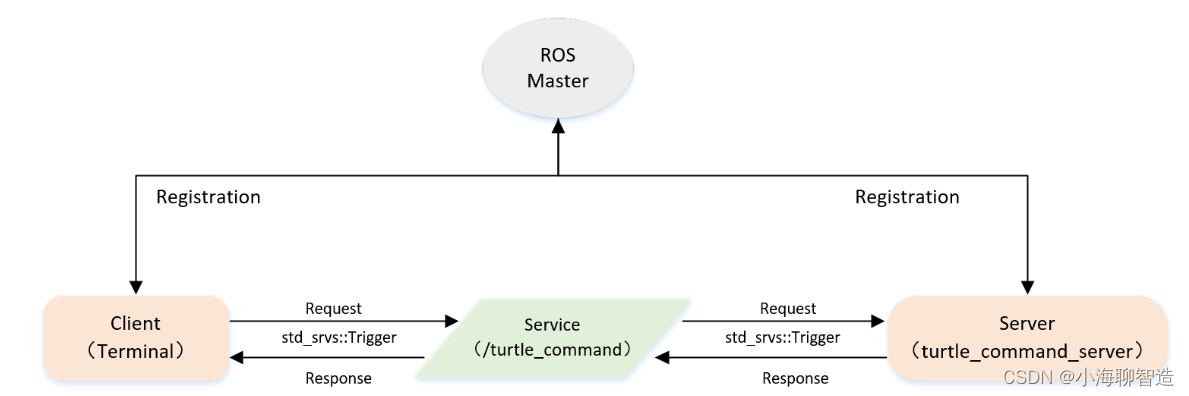
Server端本身是进行模拟海龟运动的命令端,它的实现是通过给海龟发送速度(Twist)的指令,来控制海龟运动(本身通过Topic实现)。
Client端相当于海龟运动的开关,其发布Request来控制Server端。
通过自定义名为 /turtle_command 的Service实现,中间传输消息的数据类型为std_srvs::Trigger(一种针对服务标准std_srvs下的数据定义)来通信。Trigger意为触发,通过Trigger信号来触发Server端的运动指令。
Server端接收这个Trigger信号后,可控制其是否要给海龟发送Twist指令,同时给Client发送Response反馈告诉它海龟的运动状态。
ROS Master负责管理节点。
参考:
https://blog.csdn.net/qq_27928443/article/details/131038371