立体相机标定
相机成像过程中涉及的4个坐标系:
1、世界坐标系:由用户定义的三维世界坐标系,描述物体和相机在真实世界中的位置,原点可以任意选择。
2、相机坐标系:以相机的光心为坐标原点,X轴和Y轴平行于图像坐标系的X轴和Y轴,Z轴为相机的光轴。
3、图像坐标系:与成像平面重合,以成像平面的中心(光轴与成像平面的交点)为坐标原点,X轴和Y轴分别平行于成像平面的两条边。
4、像素坐标系:与成像平面重合,以成像平面的左上角顶点和原点,X轴和Y轴分别平行于图像坐标系的X轴和Y轴。
相机成像过程:

(1)世界坐标系---相机坐标系

R表示旋转矩阵,T表示平移矩阵。
(2)相机坐标系---图像坐标系
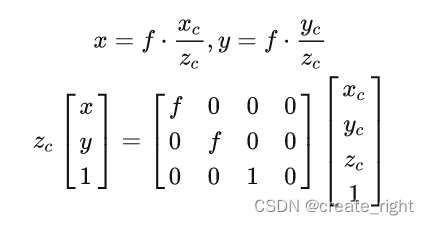
f表示焦距。
(3)图像坐标系---像素坐标系

综合上述,得
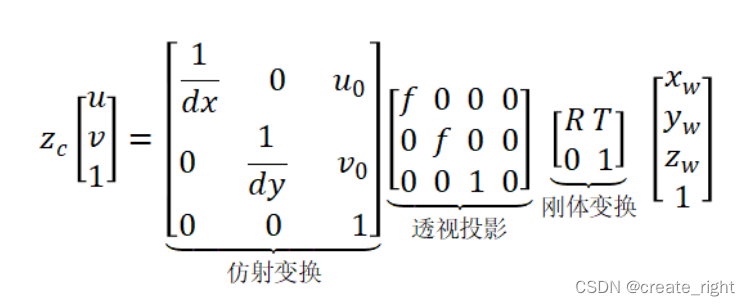
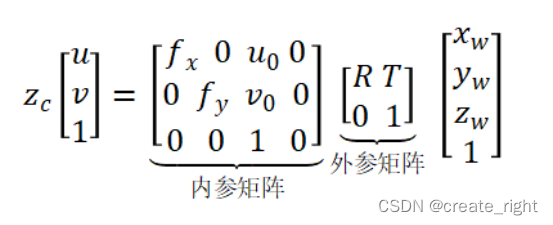
内参矩阵取决于相机内部参数,外参矩阵取决于相机坐标系和世界坐标系的位置。而相机标定,就可以帮我们求解出内参矩阵和外参矩阵。
相机标定的目的:计算出相机的内参数和畸变参数矩阵,通过畸变改正模型完成校正,进而输出无畸变的图像。
相机标定是一个估计相机模型参数的过程。

拍照的时候把空间物体信息通过相机变成了二维图像,这个过程本来是不可逆的,但如果我们可以找到一个相机的数学模型,就可以从二维图像和数学模型反推得到原来的三维信息。 这个逼近的过程就是相机标定的过程。