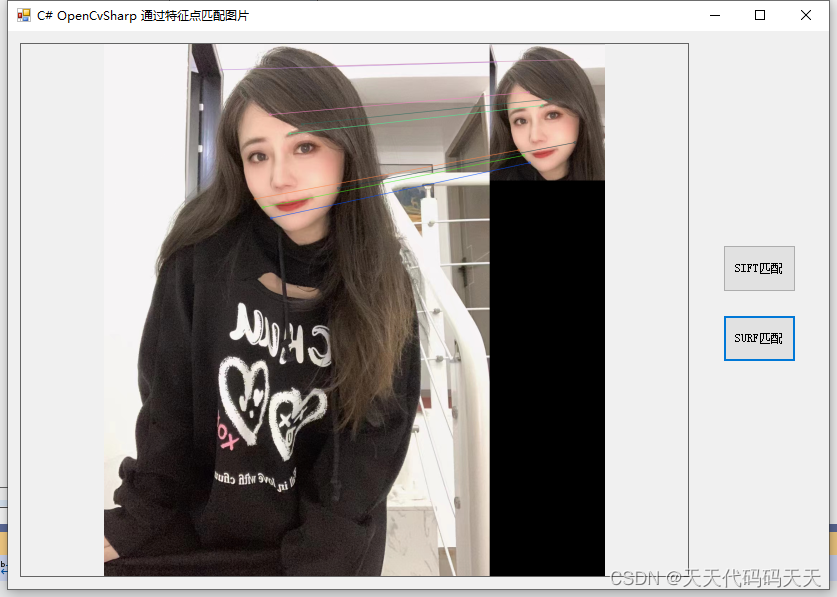
C# OpenCvSharp 通过特征点匹配图片
SIFT匹配

SURF匹配
项目
代码
using OpenCvSharp;
using OpenCvSharp.Extensions;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Linq;
using System.Text.RegularExpressions;
using System.Windows.Forms;
using static System.Net.Mime.MediaTypeNames;namespace OpenCvSharp_Demo
{public partial class frmMain : Form{public frmMain(){InitializeComponent();}private void Form1_Load(object sender, EventArgs e){}private void button2_Click(object sender, EventArgs e){Mat matSrc = new Mat("1.jpg");Mat matTo = new Mat("2.jpg");var outMat = MatchPicBySift(matSrc, matTo);pictureBox2.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(outMat);}private void button1_Click(object sender, EventArgs e){Mat matSrc = new Mat("1.jpg");Mat matTo = new Mat("2.jpg");var outMat = MatchPicBySurf(matSrc, matTo, 10);pictureBox2.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(outMat);}public Point2d Point2fToPoint2d(Point2f point) => new Point2d((double)point.X, (double)point.Y);public Mat MatchPicBySift(Mat matSrc, Mat matTo){using (Mat matSrcRet = new Mat())using (Mat matToRet = new Mat()){KeyPoint[] keyPointsSrc, keyPointsTo;using (var sift = OpenCvSharp.Features2D.SIFT.Create()){sift.DetectAndCompute(matSrc, null, out keyPointsSrc, matSrcRet);sift.DetectAndCompute(matTo, null, out keyPointsTo, matToRet);}using (var bfMatcher = new OpenCvSharp.BFMatcher()){var matches = bfMatcher.KnnMatch(matSrcRet, matToRet, k: 2);var pointsSrc = new List<Point2f>();var pointsDst = new List<Point2f>();var goodMatches = new List<DMatch>();foreach (DMatch[] items in matches.Where(x => x.Length > 1)){if (items[0].Distance < 0.5 * items[1].Distance){pointsSrc.Add(keyPointsSrc[items[0].QueryIdx].Pt);pointsDst.Add(keyPointsTo[items[0].TrainIdx].Pt);goodMatches.Add(items[0]);Console.WriteLine($"{keyPointsSrc[items[0].QueryIdx].Pt.X}, {keyPointsSrc[items[0].QueryIdx].Pt.Y}");}}var outMat = new Mat();// 算法RANSAC对匹配的结果做过滤var pSrc = pointsSrc.ConvertAll(Point2fToPoint2d);var pDst = pointsDst.ConvertAll(Point2fToPoint2d);var outMask = new Mat();// 如果原始的匹配结果为空, 则跳过过滤步骤if (pSrc.Count > 0 && pDst.Count > 0)Cv2.FindHomography(pSrc, pDst, HomographyMethods.Ransac, mask: outMask);// 如果通过RANSAC处理后的匹配点大于10个,才应用过滤. 否则使用原始的匹配点结果(匹配点过少的时候通过RANSAC处理后,可能会得到0个匹配点的结果).if (outMask.Rows > 10){byte[] maskBytes = new byte[outMask.Rows * outMask.Cols];outMask.GetArray(out maskBytes);Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, matchesMask: maskBytes, flags: DrawMatchesFlags.NotDrawSinglePoints);}elseCv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, flags: DrawMatchesFlags.NotDrawSinglePoints);return outMat;}}}public Mat MatchPicBySurf(Mat matSrc, Mat matTo, double threshold = 400){using (Mat matSrcRet = new Mat())using (Mat matToRet = new Mat()){KeyPoint[] keyPointsSrc, keyPointsTo;using (var surf = OpenCvSharp.XFeatures2D.SURF.Create(threshold, 4, 3, true, true)){surf.DetectAndCompute(matSrc, null, out keyPointsSrc, matSrcRet);surf.DetectAndCompute(matTo, null, out keyPointsTo, matToRet);}using (var flnMatcher = new OpenCvSharp.FlannBasedMatcher()){var matches = flnMatcher.Match(matSrcRet, matToRet);//求最小最大距离double minDistance = 1000;//反向逼近double maxDistance = 0;for (int i = 0; i < matSrcRet.Rows; i++){double distance = matches[i].Distance;if (distance > maxDistance){maxDistance = distance;}if (distance < minDistance){minDistance = distance;}}Console.WriteLine($"max distance : {maxDistance}");Console.WriteLine($"min distance : {minDistance}");var pointsSrc = new List<Point2f>();var pointsDst = new List<Point2f>();//筛选较好的匹配点var goodMatches = new List<DMatch>();for (int i = 0; i < matSrcRet.Rows; i++){double distance = matches[i].Distance;if (distance < Math.Max(minDistance * 2, 0.02)){pointsSrc.Add(keyPointsSrc[matches[i].QueryIdx].Pt);pointsDst.Add(keyPointsTo[matches[i].TrainIdx].Pt);//距离小于范围的压入新的DMatchgoodMatches.Add(matches[i]);}}var outMat = new Mat();// 算法RANSAC对匹配的结果做过滤var pSrc = pointsSrc.ConvertAll(Point2fToPoint2d);var pDst = pointsDst.ConvertAll(Point2fToPoint2d);var outMask = new Mat();// 如果原始的匹配结果为空, 则跳过过滤步骤if (pSrc.Count > 0 && pDst.Count > 0)Cv2.FindHomography(pSrc, pDst, HomographyMethods.Ransac, mask: outMask);// 如果通过RANSAC处理后的匹配点大于10个,才应用过滤. 否则使用原始的匹配点结果(匹配点过少的时候通过RANSAC处理后,可能会得到0个匹配点的结果).if (outMask.Rows > 10){byte[] maskBytes = new byte[outMask.Rows * outMask.Cols];outMask.GetArray(out maskBytes);Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, matchesMask: maskBytes, flags: DrawMatchesFlags.NotDrawSinglePoints);}elseCv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, flags: DrawMatchesFlags.NotDrawSinglePoints);return outMat;}}}}
}
下载
Demo下载