机器人伺服驱动控制环
伺服驱动器的控制环,包括:位置环、速度环、电流环这三种类型。
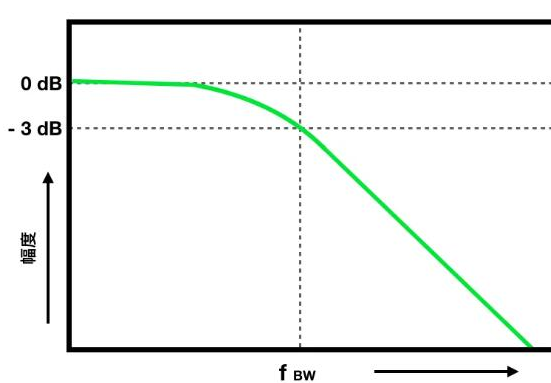
对于伺服的控制回路,内侧控制环的响应带宽一般会是外侧控制环的5到10倍。也就是说,电流环带宽大致是速度环的5到10倍,速度环带宽则约为位置环的5到10倍。
在任何级联系统中,内环的响应时间或带宽必须快于外环的响应时间。
参考文献:
【1】伺服驱动器-伺服驱动器的带宽-中国自动化网提到伺服驱动器的控制环,我们知道它通常包括:位置环、速度环、电流环这三种类型。![]() https://www.chuandong.com/news/news235217.html
https://www.chuandong.com/news/news235217.html
什么是伺服电机电流、速度和位置环路以及带宽 - e-motionsupply.cne-motionsupply.cn![]() https://www.e-motionsupply.cn/nd.jsp?id=168
https://www.e-motionsupply.cn/nd.jsp?id=168