OpenCV—自动驾驶实时道路车道检测(完整代码)
自动驾驶汽车是人工智能领域最具颠覆性的创新之一。在深度学习算法的推动下,它们不断推动我们的社会向前发展,并在移动领域创造新的机遇。自动驾驶汽车可以去传统汽车可以去的任何地方,并且可以完成经验丰富的人类驾驶员所做的一切。但正确地训练它是非常重要的。自动驾驶汽车训练过程中涉及的众多步骤之一是车道检测,这是第一步。今天,我们将学习如何使用视频进行车道检测。
道路车道检测涉及的简要步骤
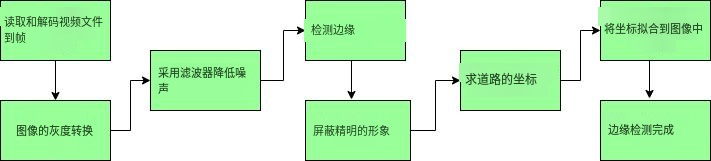
道路车道检测需要检测自动驾驶汽车的路径并避免进入其他车道的风险。车道识别算法通过分析视觉输入来可靠地识别车道的位置和边界。高级驾驶员辅助系统 (ADAS) 和自动驾驶车辆系统都严重依赖它们。今天我们将讨论其中一种车道检测算法。涉及的步骤是:
-
捕获和解码视频文件:我们将使用 VideoFileClip 对象捕获视频,并在初始化捕获后对每个视频帧进行解码(即转换为图像序列)。
-
图像的灰度转换:视频帧是RGB格式的,RGB转换为灰度是因为处理单通道图像比处理三通道彩色图像快。
-
减少噪声:噪声会产生虚假边缘,因此在进一步处理之前,必须执行图像平滑处理。高斯模糊用于执行此过程。高斯模糊是一种典型的图像滤波技术,用于降低噪声和增强图像特性。使用高斯分布选择权重,每个像素都经过考虑其周围像素的加权平均值。通过减少高频元素并提高整体图像质量,这种模糊技术可以创建更柔和、视觉上更