嵌入式 STM32 步进电机驱动,干货满满,建议收藏
目录
步进电机
1、步进电机驱动原理
2、步进电机驱动
3、步进电机应用
1、第一步:初始化IO口
2、设置行进方式
四、源码
步进电机
步进电机被广泛应用于ATM机、喷绘机、刻字机、写真机、喷涂设备、医疗仪器及设备、计算机外设及海量存储设备、精密仪器、工业控制系统、办公自动化、机器人等领域,特别适合要求运行平稳、低噪音、响应快、使用寿命长、高输出扭矩的应用场合。
步进电机的特点是保持转矩不高,频繁启动反应速度快、运转噪音低、运行平稳、控制性能好、整机成本低。
1、步进电机驱动原理
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
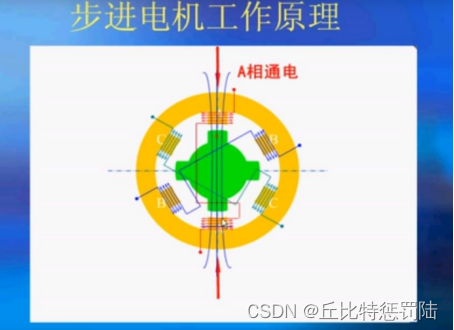
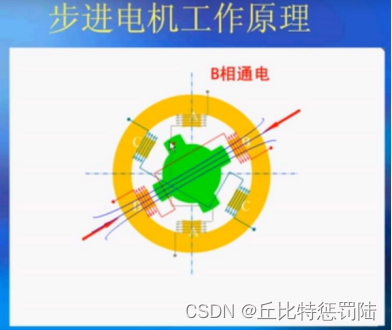
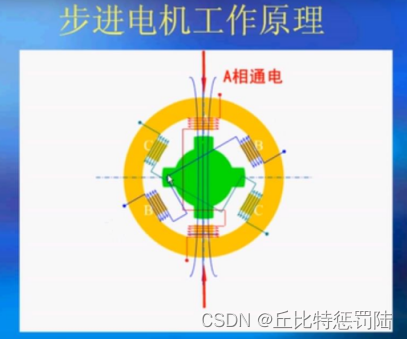
步进电机中间部分是转子,由一个永磁体组成,边上的是定子绕组。当定子的一个绕组通电时,将产生一个方向的电磁场,如果这个磁场的方向和转子磁场方向不在同一条直线上,那么定子和转子的磁场将产生一个扭力将定子扭转。依次改变绕组的磁场,就可以使步进电机正转或反转(比如通电次序为A->B->C->D正转,反之则反转)。而改变磁场切换的时间间隔,就可以控制步进电机的速度了,这就是步进电机的驱动原理。

2、步进电机驱动
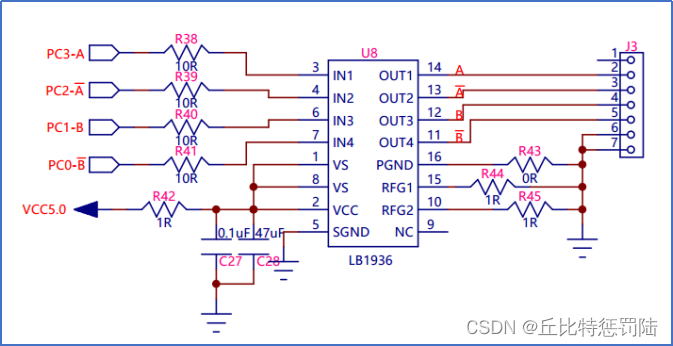
从原理图上可以看到,我们给PC0~PC3输出数据,数据就会进入到LB1936控制芯片,然后再通过OUT1~OUT4输出给步进电机。
原理图已经没有问题了,那我们接下来看看步进电机的时序,如下图所示:
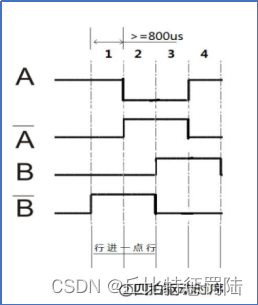
步进电机有四个引脚;
每四个节拍可以行进“一点”距离;
每一个节拍的电平状态必须保持800us以上的稳定状态才可以切换到下一个节拍;
每一个节拍都需要控制四个管脚的电平;
根据步进电机的驱动原理,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为步进角),它的旋转是以固定的角度一步一步运行的。
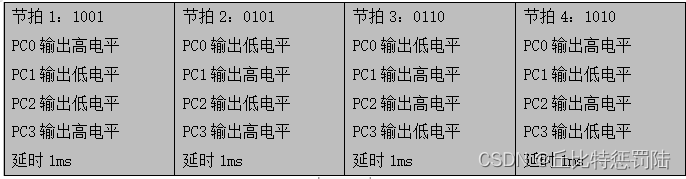
PC0~3根据时序节拍来输出高低电平。
3、步进电机应用
该分析的都分析完了,接下来我们就是写代码了!
1、第一步:初始化IO口
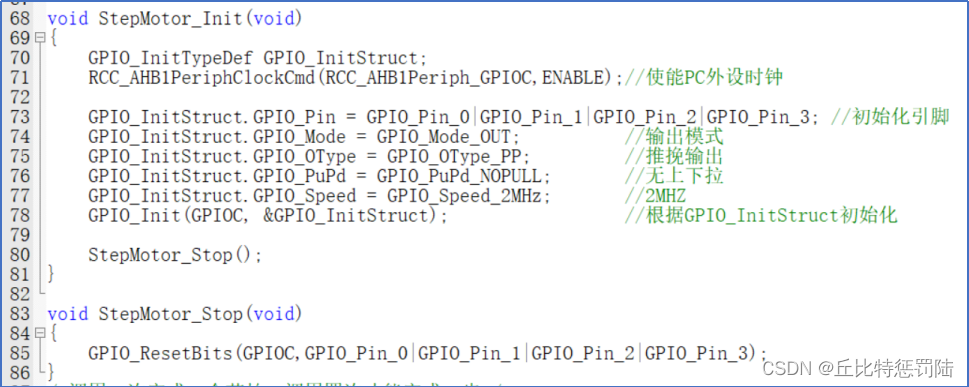
初始化完成之后先关系运行,不然你的步进电机可能会在乱动。
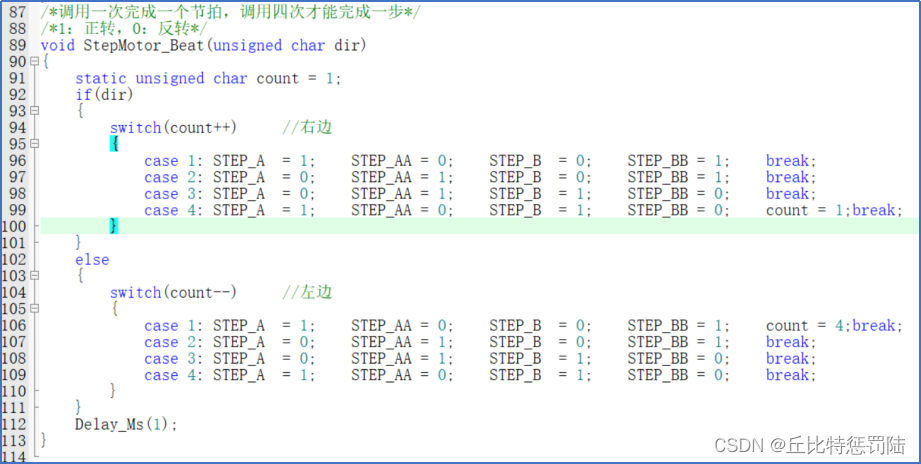
2、设置行进方式
根据之前分析的驱动模式去设置步进电机的行进方向和速度。
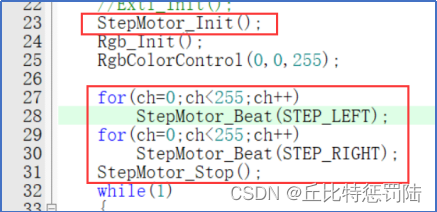
记得在主函数中去初始化和调用,否则写了也没用对吧。
四、源码
点击关注自动下载源码