STM智能小车——OLED实现测速小车
目录
1. 测速模块
2. 测试原理和单位换算
3. 定时器和中断实现测速开发和调试代码
4. 小车速度显示在OLED屏
1. 测速模块

- 用途:广泛用于电机转速检测,脉冲计数,位置限位等。
- 有遮挡,输出高电平;无遮挡,输出低电平
- 接线 :VCC 接电源正极3.3-5V
- GND 接电源负极 DO TTL开关信号输出
- AO 此模块不起作用
2. 测试原理和单位换算
- 轮子走一圈,经过一个周长,C = 2x3.14x半径= 3.14 x 直径(6.5cm)
- 对应的码盘也转了一圈,码盘有20个格子,每经过一个格子,会遮挡(高电平)和不遮挡(低电平), 那么一个脉冲就是走了 3.14 * 6.5 cm /20 = 1.0205CM
- 定时器可以设计成一秒,统计脉冲数,一个脉冲就是1cm
- 假设一秒有80脉冲,那么就是80cm/s
3. 定时器和中断实现测速开发和调试代码
测试数据通过串口发送到上位机
硬件接线
测速模块:
- VCC -- 3.3V 不能接5V,否则遮挡一次会触发3次中断
- OUT -- PB14
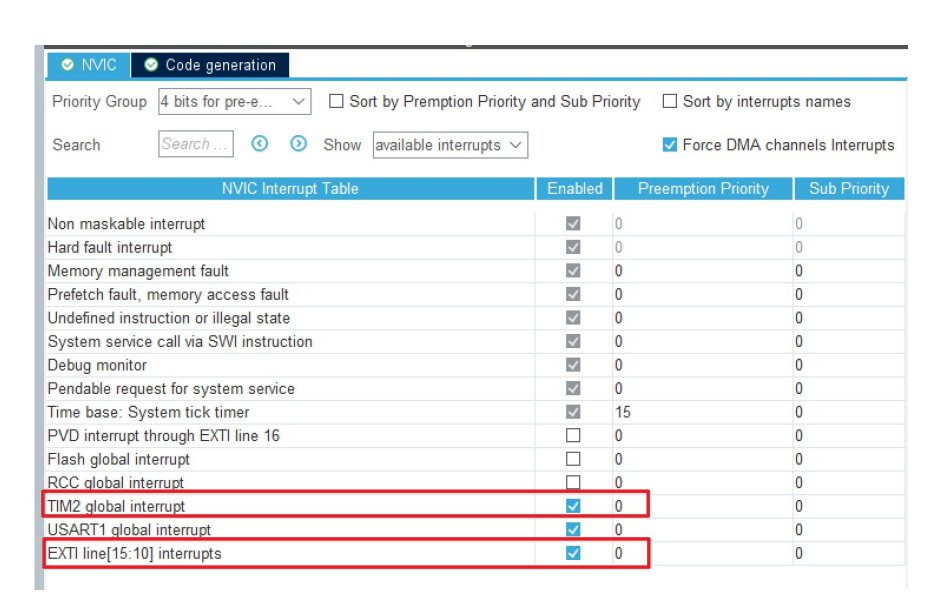
cubeMX配置

代码实现:
unsigned int speedCnt;void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if (GPIO_Pin == GPIO_PIN_14)if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14) == GPIO_PIN_RESET)speedCnt++;
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{printf("speed: %d\r\n", speedCnt);speedCnt = 0;
}main函数里:
HAL_TIM_Base_Start_IT(&htim2);4. 小车速度显示在OLED屏
OLED模块介绍:STM32 OLED屏幕显示详解
硬件接线
- SCL -- PB6
- SDA -- PB7
代码示例:
oled.c
#include "oled.h"
#include "i2c.h"
#include "oledfont.h"void Oled_Write_Cmd(uint8_t dataCmd)
{HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x00, I2C_MEMADD_SIZE_8BIT,&dataCmd, 1, 0xff);
}void Oled_Write_Data(uint8_t dataData)
{HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x40, I2C_MEMADD_SIZE_8BIT,&dataData, 1, 0xff);
}void Oled_Init(void){Oled_Write_Cmd(0xAE);//--display offOled_Write_Cmd(0x00);//---set low column addressOled_Write_Cmd(0x10);//---set high column addressOled_Write_Cmd(0x40);//--set start line address Oled_Write_Cmd(0xB0);//--set page addressOled_Write_Cmd(0x81); // contract controlOled_Write_Cmd(0xFF);//--128 Oled_Write_Cmd(0xA1);//set segment remap Oled_Write_Cmd(0xA6);//--normal / reverseOled_Write_Cmd(0xA8);//--set multiplex ratio(1 to 64)Oled_Write_Cmd(0x3F);//--1/32 dutyOled_Write_Cmd(0xC8);//Com scan directionOled_Write_Cmd(0xD3);//-set display offsetOled_Write_Cmd(0x00);//Oled_Write_Cmd(0xD5);//set osc divisionOled_Write_Cmd(0x80);//Oled_Write_Cmd(0xD8);//set area color mode offOled_Write_Cmd(0x05);//Oled_Write_Cmd(0xD9);//Set Pre-Charge PeriodOled_Write_Cmd(0xF1);//Oled_Write_Cmd(0xDA);//set com pin configuartionOled_Write_Cmd(0x12);//Oled_Write_Cmd(0xDB);//set VcomhOled_Write_Cmd(0x30);//Oled_Write_Cmd(0x8D);//set charge pump enableOled_Write_Cmd(0x14);//Oled_Write_Cmd(0xAF);//--turn on oled panel
}void Oled_Screen_Clear(void){char i,n;Oled_Write_Cmd (0x20); //set memory addressing modeOled_Write_Cmd (0x02); //page addressing modefor(i=0;i<8;i++){Oled_Write_Cmd(0xb0+i); Oled_Write_Cmd(0x00); Oled_Write_Cmd(0x10); for(n=0;n<128;n++)Oled_Write_Data(0x00); }
}void Oled_Show_Char(char row,char col,char oledChar){ //row*2-2unsigned int i;Oled_Write_Cmd(0xb0+(row*2-2)); //page 0Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //high for(i=((oledChar-32)*16);i<((oledChar-32)*16+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}Oled_Write_Cmd(0xb0+(row*2-1)); //page 1Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //highfor(i=((oledChar-32)*16+8);i<((oledChar-32)*16+8+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}
}/******************************************************************************/
// 函数名称:Oled_Show_Char
// 输入参数:oledChar
// 输出参数:无
// 函数功能:OLED显示单个字符
/******************************************************************************/
void Oled_Show_Str(char row,char col,char *str){while(*str!=0){Oled_Show_Char(row,col,*str);str++;col += 8; }
}
main.c
extern uint8_t buf;
unsigned int speedCnt = 0;
char speedMes[24]; //主程序发送速度数据的字符串缓冲区void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if (GPIO_Pin == GPIO_PIN_14)if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14) == GPIO_PIN_RESET)speedCnt++;
}void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{printf("speed: %d\r\n", speedCnt);sprintf(speedMes,"speed:%2d cm/s",speedCnt);//串口数据的字符串拼装,speed是格子,每个格子1cmOled_Show_Str(2,2,speedMes);speedCnt = 0;
}