【计算机视觉】相机
文章目录
- 一、原始的相机:针孔相机(Pinhole Camera)
- 二、针孔相机的数学模型
- 三、真实相机
- 四、透镜的缺陷
我的《计算机视觉》系列参考UC Berkeley的CS180课程,PPT可以在课程主页看到。

一、原始的相机:针孔相机(Pinhole Camera)

想要拍一张相片,直接拿胶片对着景物肯定是不行的,因为物体的每一点发出的光线都会到达胶片上的每一点,从而导致胶片上的影像非常模糊,甚至什么都看不出来。因此,我们想建立景物和胶片一一对应的关系,就必须让景物的每一点只有一束光线到达胶片上的一点(其实是很小的区域)。为了达到这个目的,我们就必须用一个隔板把其他多余的光挡住(图中的barrier),只允许其中一束光通过,也就是隔板上的孔(aperture)。这就是针孔相机的原理了。这里的孔在现代的相机上就是光圈,英文名同样是aperture。

针孔相机无处不在,树叶之间的缝隙也可以构成针孔相机,树荫下地面上圆形的亮斑其实就是太阳的像。当发生日食的时候,亮斑的形状就不是圆形的了,而是月牙形(如上图所示)。

有时候,连窗子都可以是照相机。如图所示,酒店的窗户构成针孔相机使得窗外的塔尖倒映在了墙上。
二、针孔相机的数学模型
下面,我们对针孔相机建立数学模型。

针孔相机捕捉的是光束,所有的光束通过一个投影中心(Center of Projection, COP)。像是在像平面上形成的。有效焦距 d d d是从投影中心到像平面的距离。
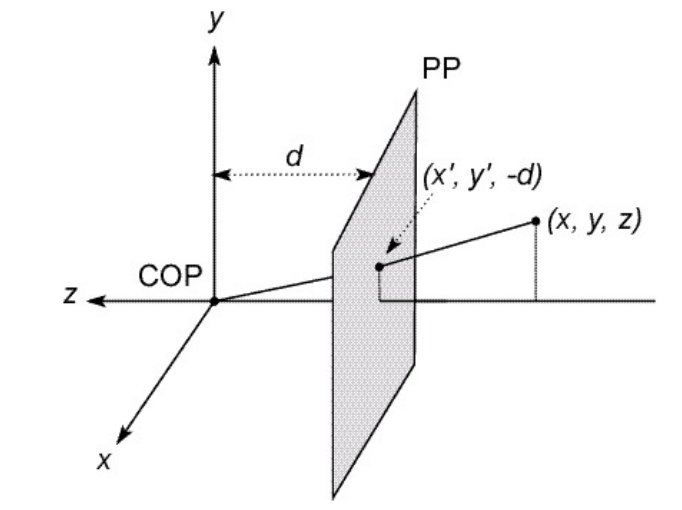
我们把投影中心放在空间直角坐标系的原点。这里与实际不同的是,我们把像平面放在投影中心的前面(介于物和投影中心之间的 z = − d z=-d z=−d处,以后处理其他相机也是如此),这样的话就可以避免景物倒过来的问题了。这样做是可行的,因为把像平面放在 z = d z=d z=d和 z = − d z=-d z=−d处的唯一区别就是景物是正着的还是倒着的。然后,用一些相似三角形,就可以知道物点 ( x , y , z ) (x,y,z) (x,y,z)对应的像点是 ( − d x z , − d y z , − d ) \left(-d\cfrac xz,-d\cfrac yz,-d\right) (−dzx,−dzy,−d)。忽略 z z z坐标 − d -d −d,我们就知道胶片上的坐标是 ( − d x z , − d y z ) \left(-d\cfrac xz,-d\cfrac yz\right) (−dzx,−dzy)。
三、真实相机
当然了,针孔相机是旧时代的产物,现在没有人在用针孔相机。现在的相机大都是基于透镜的。接下来我们会建立现代相机的模型。
首先我们讨论一下光圈半径。既然允许通过的光太多会使影像变模糊,为什么不让光圈越小越好呢?答案是:还有光的衍射现象。这里又要涉及一些瑞利判据之类的东西了,啊啊啊啊大物我的噩梦……

所以说光圈半径应该在一个合理的范围内。此外,现代相机使用透镜有很多好处。小孔成像利用的是光的直线传播,景物发出的大部分光被挡在外面了,只有一小部分进入了小孔,这就导致单位时间进入的光强很低,需要很长的曝光时间来弥补。而透镜允许我们不必浪费挡在外面的光,而是把光折进光圈,从而使得更多的光进入光圈,达到缩短曝光时间、降低衍射效应、提升图像品质的目的。透镜可以让光聚焦在一个特定的平面(焦平面)上,我们可以通过调节透镜的形状(曲率半径)、折射率来调节焦距,比针孔相机更方便。
当然,我们知道凸透镜成像满足高斯公式( 1 u + 1 v = 1 f \cfrac 1u+\cfrac 1v=\cfrac 1f u1+v1=f1)死去的几何光学突然开始攻击我,这也就意味着对于不同的物距 u u u,相距 v v v是不同的,因此只有物距在一个范围内才能映射到给定的像平面上。物距偏离合理范围,聚焦的平面就不在像平面上了,就像近视眼和远视眼一样。
使图像清晰的最远和最近物距之差称为景深(depth of field):

光圈半径可以控制景深。我们知道,光圈越大,景物的一个点发出的光线映射到像平面上的光斑半径就越大,使得图像不清晰。我们又知道,凸透镜成实像时满足“物近像远像变大,物远像近像变小”,所以景物太远或太近都会导致聚焦不到像平面上,从而使光斑变大。当光圈变小时,可以约数光发散的角度,使像上的光斑变小,从而能允许更远和更近的物距,使得景深变大。焦比(F-number)是焦距与光圈直径之比,焦比越大,意味着光圈半径越小,使得曝光时间增长(因为进入光圈的光变少了,需要更长的曝光时间来弥补),但景深也变大。
焦距可以决定视野(field of view, FOV)。焦距越小,说明透镜遮光能力越强,很边缘的光都可以折进光圈里面,使得视野越大;同时,同一个物体的像也会变小。



焦距太小会导致拍摄变形(比如上图左边的左右脸不一样大)。这是因为小焦距对应大视角,从而使近、远景物占视角的比例之比加大,近景物在图片中的比例被夸张地放大,从而使图像呈现出诡异的形状。
四、透镜的缺陷
- 色差(chromatic aberration)。透镜对不同波长的光的折射率不同,使得不同颜色的像位置发生偏移。

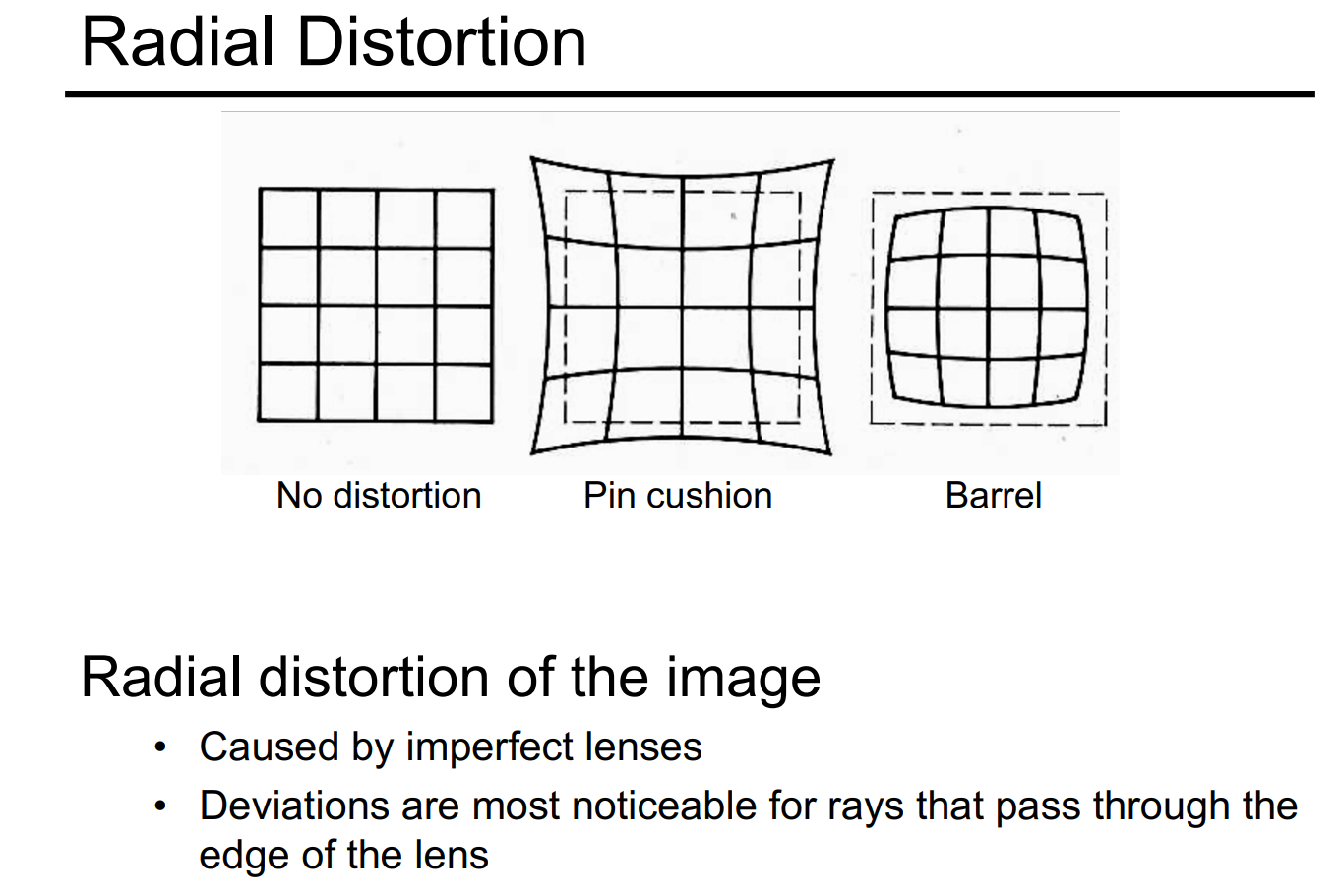
- 径向畸变(radial distortion)。这是由不完美的透镜导致的;光线通过透镜边缘时会产生偏移。