V3Det大规模词汇视觉检测数据集与LaRS海上全景障碍物检测数据集
V3Det与LaRS是ICCV2023上发表的数据集工作,规模都比较大,后续有可能会用到,因此记录下来。
V3Det: Vast Vocabulary Visual Detection Dataset
Paper: https://arxiv.org/abs/2304.03752
URL: https://v3det.openxlab.org.cn/
在现实世界中检测任意对象的最新进展是在词汇相对有限的对象检测数据集上进行训练和评估的。为了便于开发更通用的视觉对象检测,我们提出了V3Det,这是一个庞大的词汇视觉检测数据集,在海量图像上具有精确注释的边界框。V3Det具有几个吸引人的特性:1)丰富的词汇:它包含来自真实世界图像上13204个类别的对象的边界框,比现有的大词汇对象检测数据集(例如LVIS)大10倍。2) 层次类别组织:V3Det的庞大词汇由一个层次类别树组织,该树注释了类别之间的包含关系,鼓励在庞大和开放的词汇对象检测中探索类别关系。3) 丰富的注释:V3Det包含243k张图像中的精确注释对象,以及由人类专家和强大的聊天机器人编写的每个类别的专业描述。通过提供广阔的探索空间,V3Det能够在大量和开放词汇的对象检测方面实现广泛的基准测试,为未来的研究带来新的观察、实践和见解。它有潜力成为开发更通用视觉感知系统的基石数据集。

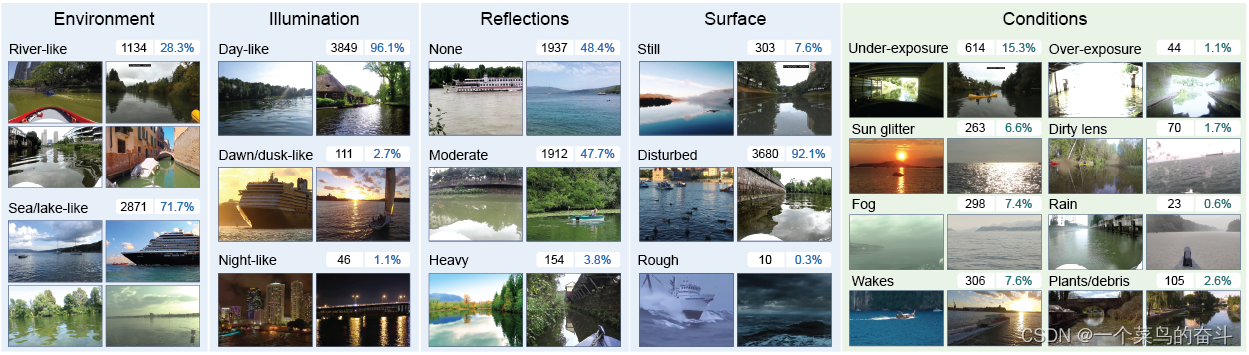
LaRS: A Diverse Panoptic Maritime Obstacle Detection Dataset and Benchmark
Paper: https://arxiv.org/abs/2308.09618
URL: https://lojzezust.github.io/lars-dataset/
由于缺乏能够充分捕捉一般海洋环境复杂性的多样化数据集,阻碍了海洋障碍物检测的进展。我们展示了第一个海上全景障碍物探测基准LaRS,以湖泊、河流和海洋为特色。我们的主要贡献是新的数据集,它在记录位置、场景类型、障碍物类别和采集条件方面拥有相关数据集中最大的多样性。LaRS由4000多个每像素标记的关键帧和9个前帧组成,以允许利用时间纹理,总计超过40k帧。每个关键帧都用11个事物类和19个全局场景属性进行注释。我们报告了27种语义和全景分割方法的结果,以及一些性能见解和未来的研究方向。