辅助驾驶功能开发-功能规范篇(22)-3-L2级辅助驾驶方案功能规范
1.3.3 TLA系统功能定义
1.3.3.1 状态机
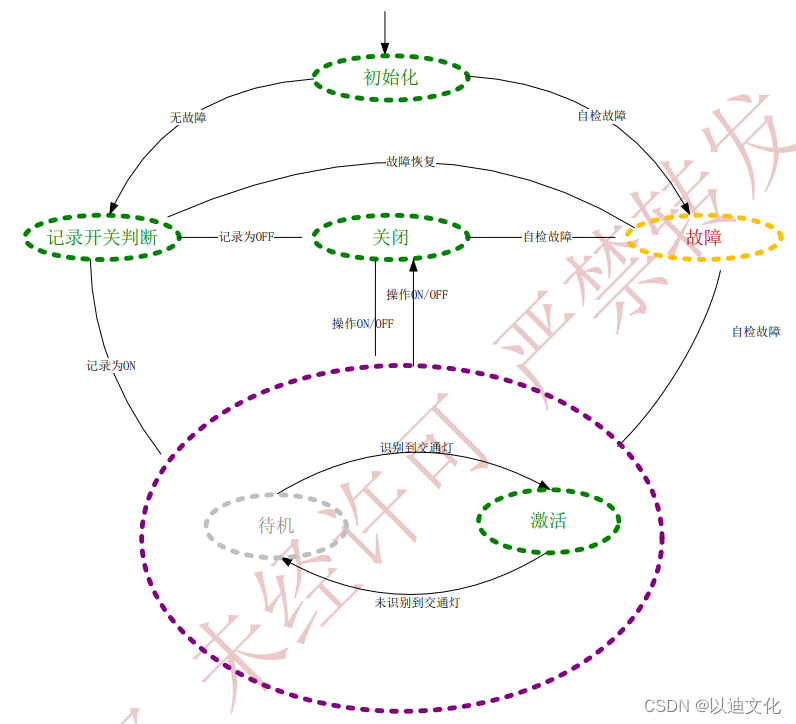
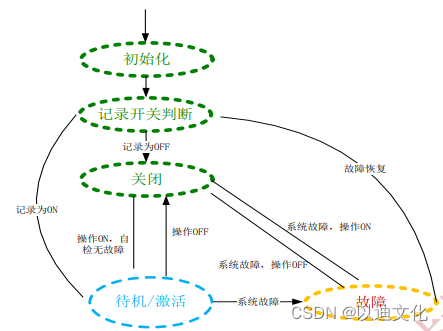
1.3.3.2 状态迁移图
1.3.3.3 功能定义
1.3.3.3.1 信号需求列表
1.3.3.3.2 系统开启关闭
1)初始化
车辆上电后,交通灯辅助系统(TLA)进行初始化,控制器需在 220ms 内发出第一帧报文,并在 3s 内完成内部自检,同时上电 3s 内不进行关联系统检测(上电 3s 内不报关联系统故障、不记录关联系统故障码)。
TLA 系统内部自检:自检完成后,如果检测到前置智能摄像头故障,导致无法支持 TLA 功能,此时如果 TLA 功能上次掉电前为关闭状态或者系统首次上电 (LAS_TLAEnable :0x0=off) ,保持 TLA 系统状态为关闭状态 (LAS_TLAStatus:0x0=off),如果 TLA 上次掉电前为开启 (LAS_TLAEnable:0x1=on),则发送车道偏离预警系统状态为失效状态(LAS_TLAStatus:0x3=Failure),仪表根据系统状态进行显示。自检完无故障时,T