C51--单片机中断
51单片机是单线程模式,需要用到硬件中断。
一、中断系统
中断系统是为使CPU具有对外界紧急事件的实时处理能力而设置的。
当中央处理器CPU正在处理某件事的时候,外界发生了紧急事件请求,要求CPU暂停当前工作,转而去处理这个紧急事件,处理完以后,再回到原来被中断的地方,继续原来的工作,这样的过程称为中断。
微型机终端系统一般允许多个中断源,每一个中断源有一个优先级别,CPU总是先相应优先级别最高的中断请求。
当CPU正在处理一个中断请求的时候(执行相应的中断服务进程),发生了另外一个优先级更高的中断请求,这时CPU暂停原来的中断源的服务程序,转而去处理优先级更高的中断请求,处理完之后再处理原来的低级中断请求,这样的过程称为中断嵌套。
有中断嵌套的系统称为多级中断系统,没有中断嵌套功能的系统称为单级中断系统
STC89C51RC/RD+系列单片机提供了8个中断请求源,它们分别是:
外部中断0(INT0)、
定时器0中断(Timer0)、
外部中断1(INT1)、
定时器1中断(Timer1)、
串口(UART)中断、
定时器2中断(Timer2)、
外部中断2(INT2)、
外部中断3(INT3)。
中断查询次序号:interrupt 0——interrupt 7;(置于中断函数名之后)
例:void Int0_Rountine(void) interrupt 0;

二、中断结构
STC89C51RC/RD+系列单片机的中断控制系统结构示意图如下:

中断允许寄存器:

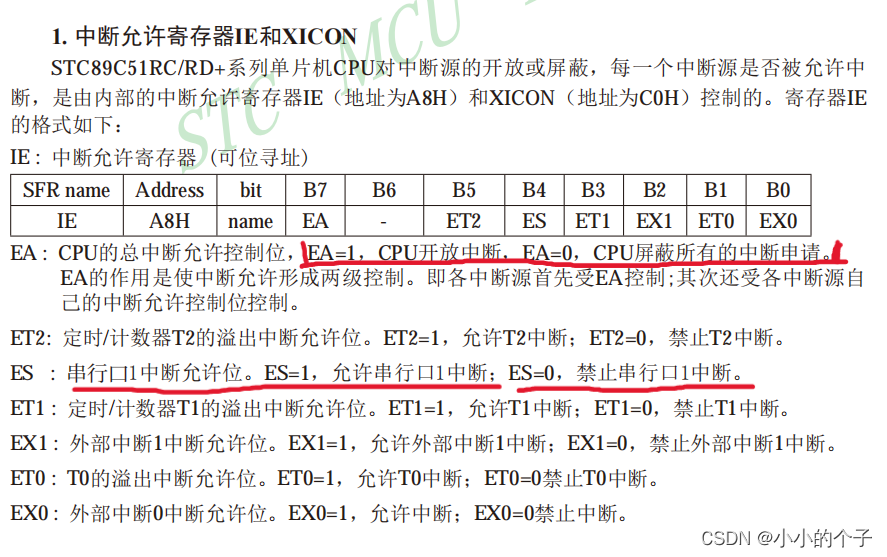

中断配置:
EA:CPU总中断允许控制位,
EA=1,CPU开放中断,
EA=0,CPU屏蔽所有中断申请。
ET0:T0的溢出中断允许位,定时器0中断,
ET0=1,允许T0中断
ET0=0,禁止T0中断
#include "reg52.h"
#include<intrins.h>sbit led = P3^6;
sbit led1 = P3^7;int cnt = 0;void Time0Init()
{TMOD = 0x01; //配置TL0 = 0x00; //给初值TH0 = 0xDC; ET0 = 1; //打开定时器0中断 EA = 1; //打开总中断EATR0 = 1; //开始计时TF0 = 0;
}void Delay300ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 3;j = 26;k = 223;do{do{while (--k);} while (--j);} while (--i);
}void main()
{led = 1;//默认关灯led1 = 1;Time0Init();while(1){//正在做事件一led1=0;Delay300ms();led1=1;Delay300ms();}}void Time0Handler() interrupt 1
{cnt++; //统计报表的次数TL0 = 0x00; //重新给初值TH0 = 0xDC;if(cnt == 100){ //爆表100次,经过1scnt = 0; //100次表示1s,重新计算cntled = !led; //每经过1s,翻转LED状态}
}