7-3、S曲线生成器【51单片机控制步进电机-TB6600系列】
摘要:本节介绍步进电机S曲线生成器的计算以及使用
一.计算原理
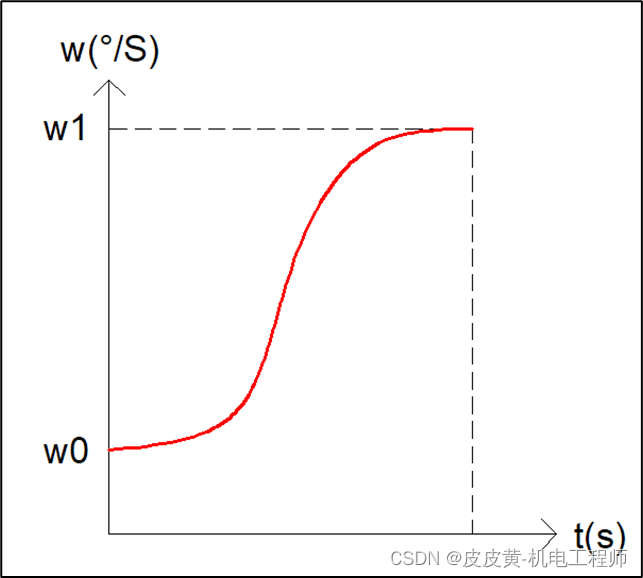
根据上一节内容,已经计算了一条任意S曲线的函数。在步进电机S曲线加减速的控制中,需要的S曲线如图1所示,横轴为时间,纵轴为角速度,其中w0为起始角速度,w1为终止角速度
在S曲线加减速控制中,加减速的角度是已知的,根据第五节内容公式③,已经计算了角度与步数的函数关系式为下式
根据第五节内容公式⑥,已经计算了定时器初值与速度的函数关系式为下式,其中速度变量n的单位为RPM

将图1的横轴变换为步数,纵轴变换的转速(RPM)后,得到图2关系图

根据第五节内容公式⑤,S曲线的函数为下式,其中该S曲线的起点P1与终点P2坐标分别为(1,n0), (step_num,n1),带入公式后即可求得K,B值,曲线方程即计算完成。然后计算从第一步到最后一步对应的定时器C值,即可求得S曲线加减速对应的数组表,在单片机控制过程中,调用该表格数据即可。(补充说明:为简化计算此处X轴步数采用均分,实际情况应该是前疏后密,后续有空余时间再补充严格计算方法)

优点是计算过程提前计算好,不消耗单片机可怜的算力,缺点是加减速较为固定,灵活程度不足,下面给出具体的S曲线生成器
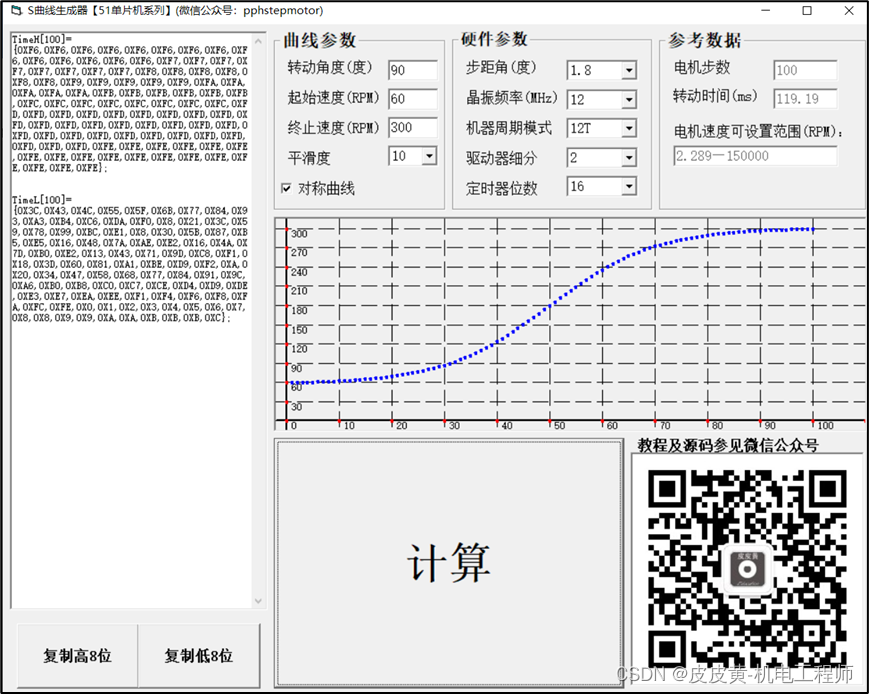
二.S曲线生成器介绍
曲线参数栏包含电机转动的角度、起始速度、终止速度、平滑度,其中最后一项是曲线的对称性,默认生成的曲线是中心对称曲线,取消勾选后,可以调整曲线左右偏移量,实现非对称加减速的效果
硬件参数栏包含硬件对应参数,参考数据栏包含该段曲线电机的转动步数及时间,并计算了电机速度的可设置范围
左侧文本框为生成的数组结果,生成后复制到单片机程序使用,中部生成对应的S曲线
三、附件
S曲线生成器下载请见微信小程序:
