通过操作Cortex-A7核,串口输入相应的命令,控制LED灯进行工作增加编程要求
2.编程要求:
1)结构体封装
typedef struct{
char* cmd_arr; //命令行字符串
gpio_t* gpiox;//GPIO组号
unsigned int pin; //引脚编号
status_t status; //LED灯状态
void(*gpio_write_pin)(gpio_t* gpiox,unsigned int pin,status_t status);
}cmd_t;
2)结构体数组
方式1:cmd_t cmd_arr[6] = {{"led1off",GPIOE,GPIO_PIN_10,GPIO_RESET_T},{},};
cmd_t cmd_arr[6] = {
[0] ={
.cmd_arr = "led1off",
.gpiox = GPIOE,
.pin = GPIO_PIN_10,
.status = GPIO_RESET_T,
.gpio_write_pin = hal_gpio_write, },
[1] = {},
[2] = {}, };
3)在串口输入一个字符串
1>在串口输入一个字符串,需要定义一个变量接收,串口接收到的字符串 char* string = uart_get_string();
2>串口中输入的字符串,与结构体中每个元素中的cmd_arr变量进行比较
3>如果比较成功,代表查到输入的字符串
思考:函数实现如何编写?
cmd_t* find_command(const char* str)
{
//串口中输入的字符串,与结构体中每个元素中的cmd_arr变量进行比较
//遍历比较,自己编写strcmp比较的函数
return 0;//失败返回0 }
4)思考main.c函数编写
cmd_t* cmd_arr;
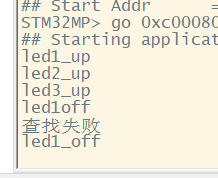
char* string = uart_get_string();
cmd_arr = find_command(string);
if(cmd_arr == 0){
查找失败
}else
{
cmd_arr->gpio_write_pin(cmd_arr->gpiox,...........) }
实现结果:
头文件:
#ifndef __UART_LED_H__
#define __UART_LED_H__#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_rcc.h"
#include "stm32mp1xx_uart.h"
#include "gpio.h"
typedef struct{char * cmd_str;gpio_t* gpiox;unsigned int pin;status_t status;void (*gpio_write_pin)(gpio_t* gpiox,unsigned int pin,status_t status);
}cmd_t;//串口初始化
void uart_init();//发送一个字符
void uart_put_char(const char str);//发送一个字符串
void uart_put_string(const char *str);//接收一个字符
char uart_get_char();//接收一个字符串
char* uart_get_string();void led1_init();void led2_init();void led3_init();//控制LED灯亮灭#endif源文件:
#include"uart_led.h"
extern void delay_ms(int ms);void uart_init()
{RCC->MP_AHB4ENSETR |= (0x1<<1);RCC->MP_AHB4ENSETR |=(0x1<<6);RCC->MP_AHB4ENSETR |=(0x1<<16);GPIOB->MODER &= (~(0x3<<4));GPIOB->MODER |=(0x1<<5);GPIOG->MODER &=(~(0x3<<22));GPIOG->MODER |=(0x1<<23);GPIOB->AFRL &=(~(0xf<<8));GPIOB->AFRL |=(0x1<<11);GPIOG->AFRH &=(~(0xf<<12));GPIOG->AFRH |=(0x6<<12);if(USART4->CR1 &=(0x1)){delay_ms(500);USART4->CR1 &= (~(0x1));}USART4->CR1 &=(~(0x1<<28));USART4->CR1 &=(~(0x1<<12));USART4->CR1 &=(~(0x1<<15));USART4->CR1 &=(~(0x1<<10));USART4->CR1 |=(0x1<<3);USART4->CR1 |=(0x1<<2);USART4->CR2 &=(~(0x3<<12));USART4->BRR |=0x22b;USART4->PRESC &= (~(0xf));USART4->CR1 |=(0x1);}//发送一个字符
void uart_put_char(const char str)
{while(!(USART4->ISR &(0x1<<7)));USART4->TDR =str;while(!(USART4->ISR &(0x1<<6)));
}//发送一个字符串
void uart_put_string(const char *str)
{while(!(USART4->ISR &(0x1<<7)));int i=0;while(str[i]!='\0'){USART4->TDR = str[i];i++;}}//接收一个字符
char uart_get_char()
{char ch;while(!(USART4->ISR &(0x1<<5)));ch=USART4->RDR;return ch;
}//接收一个字符串
char buffer[50]={0};
char* uart_get_string()
{int i=0;for(i=0;i<47;i++){buffer[i]=uart_get_char();uart_put_char(buffer[i]);if(buffer[i]=='\r')break;}buffer[i]='\0';uart_put_char('\n');return buffer;
}void led1_init()
{RCC->MP_AHB4ENSETR |=(0x1<<4);GPIOE->MODER &= (~(0x3<<20));GPIOE->MODER|= (0x1<<20);GPIOE->OTYPER &= (~(0x1<<10));GPIOE->OSPEEDR &= (~(0x3<<20));GPIOE->PUPDR &= (~(0x3<<20));}void led2_init()
{RCC->MP_AHB4ENSETR |=(0x1<<5);GPIOF->MODER &= (~(0x3<<20));GPIOF->MODER|= (0x1<<20);GPIOF->OTYPER &= (~(0x1<<10));GPIOF->OSPEEDR &= (~(0x3<<20));GPIOF->PUPDR &= (~(0x3<<20));}void led3_init()
{RCC->MP_AHB4ENSETR |=(0x1<<4);GPIOE->MODER &= (~(0x3<<16));GPIOE->MODER|= (0x1<<16);GPIOE->OTYPER &= (~(0x1<<8));GPIOE->OSPEEDR &= (~(0x3<<16));GPIOE->PUPDR &= (~(0x3<<16));}void hal_gpio_write(gpio_t * gpiox,unsigned int pin,status_t status)
{if(status==gpio_reset_t){gpiox->ODR &= (~(0x1<<pin));}else{gpiox->ODR |= (0x1<<pin);}
}测文件:
#include "uart_led.h"extern void printf(const char *fmt, ...);void delay_ms(int ms){int i,j;for(i = 0; i < ms;i++)for (j = 0; j < 1800; j++);}cmd_t cmd_arr[6]={[0] ={.cmd_str ="led1_up",.gpiox=GPIOE,.pin=GPIO_PIN_10,.status=gpio_set_t,.gpio_write_pin=hal_gpio_write,},[1] ={.cmd_str ="led1_off",.gpiox=GPIOE,.pin=GPIO_PIN_10,.status=gpio_reset_t,.gpio_write_pin=hal_gpio_write,},[2] ={.cmd_str ="led2_up",.gpiox=GPIOF,.pin=GPIO_PIN_10,.status=gpio_set_t,.gpio_write_pin=hal_gpio_write,},[3] ={.cmd_str ="led2_off",.gpiox=GPIOF,.pin=GPIO_PIN_10,.status=gpio_reset_t,.gpio_write_pin=hal_gpio_write,},[4] ={.cmd_str ="led3_up",.gpiox=GPIOE,.pin=GPIO_PIN_8,.status=gpio_set_t,.gpio_write_pin=hal_gpio_write,},[5] ={.cmd_str ="led3_off",.gpiox=GPIOE,.pin=GPIO_PIN_8,.status=gpio_reset_t,.gpio_write_pin=hal_gpio_write,},};cmd_t* find_command(char *str1){int j,i;for( j=0;j<6;j++){for(i=0;str1[i]!='\0';i++){if(str1[i]!=cmd_arr[j].cmd_str[i]){break;}}if(str1[i]=='\0'){return cmd_arr+j;}}return 0;}int main(){//串口初始化//实现串口数据收发led1_init();led2_init();led3_init();uart_init();cmd_t* cmd_ack;while(1){char *str=uart_get_string();cmd_ack=find_command(str);if(cmd_ack==0){printf("查找失败\n");}else{cmd_ack->gpio_write_pin(cmd_ack->gpiox,cmd_ack->pin,cmd_ack->status);}}return 0;}测试结果: