matlab相机标定实验
- 实验原理
1. 相机标定坐标系
相机的参数对目标的识别、定位精度有很大的影响,相机标定就是为了求出相机的内外参数。标定中有3个不同层次的坐标系:世界坐标系、相机坐标系和图像坐标系(图像物理坐标系和图像像素坐标系)。世界坐标系也称真实或现实世界坐标系,它是客观世界的绝对坐标。一般的3D场景都用这个坐标系来表示。相机为中心制定的坐标系,一般取相机的光学轴为Zc轴。图像物理坐标系是在相机内所形成的像平面xy坐标系,一般取像平面与相机坐标系平面平行。
为了确定相机的内参数,需要知道相机的成像芯片做构成的图像平面坐标系和相机采集的图像的像素坐标系之间的关系,如图1示。
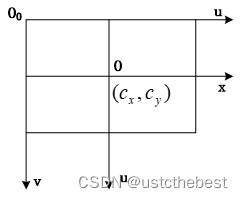
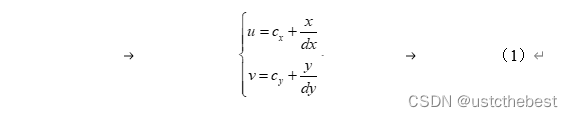
图中O为相机光轴和成像芯片的交点;O0为像素坐标系的中心。则图像平面坐标系和像素坐标系可以通过式(1)进行相互转换: