使用Autoware标定工具包联合标定相机和激光雷达
前面文章介绍了,安装autoware标定工具包、ros驱动usb相机、robosense-16线激光雷达的使用,本文记录使用Autoware标定工具包联合标定相机和激光雷达的过程。
1.ros驱动相机,启动相机;启动激光雷达
2.联合录制bag包
rosbag record -a
参照大佬AdamShan的录制建议,时间长一些,调整占位动作
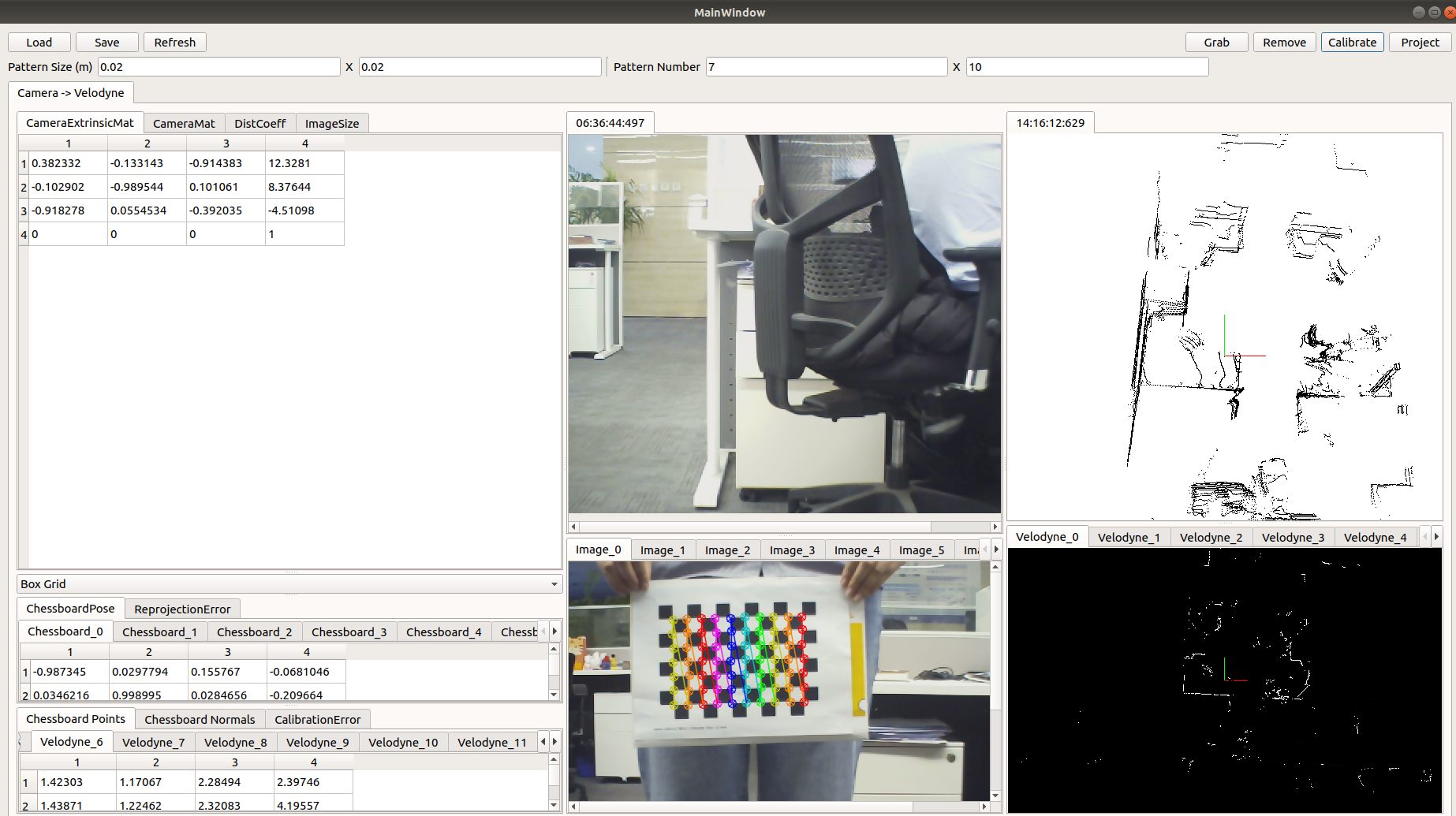
3.打开标定工具(此过程中相机、雷达保持开着状态)
选择相机节点,然后选择Camera->Velodyne
进入界面,根据自己标定板大小设置尺寸(Pattern Size),然后重启一下标定工具
播放点云
rosbag play bag包名称.bag /lslidar_point_cloud:=/points_raw
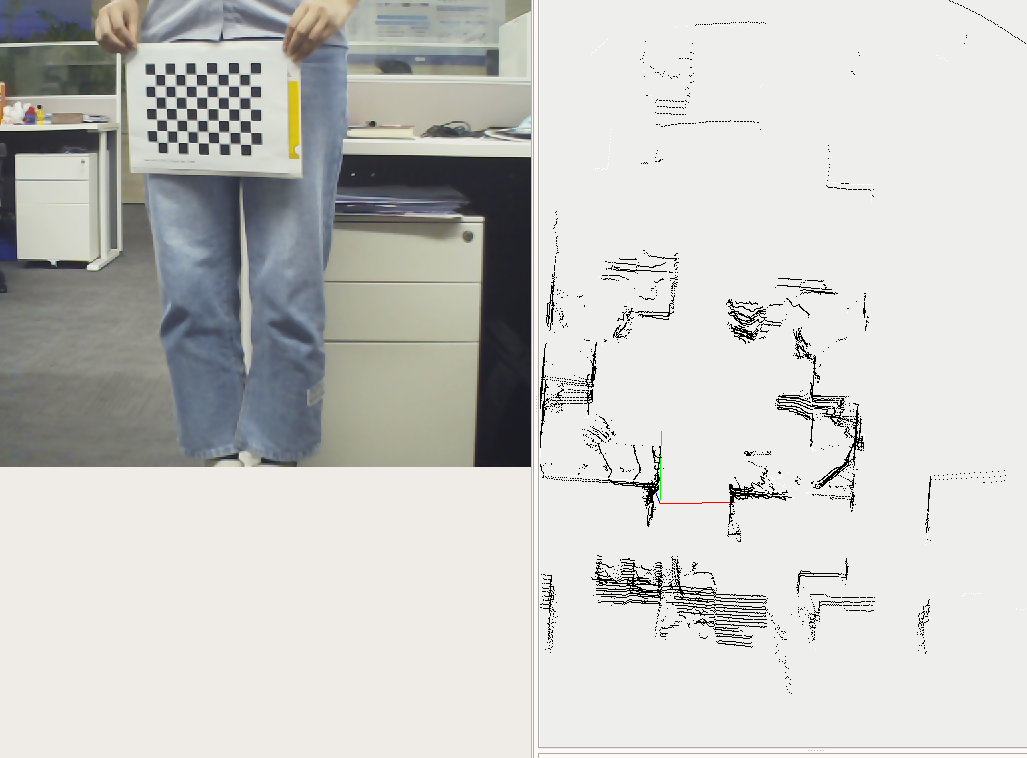
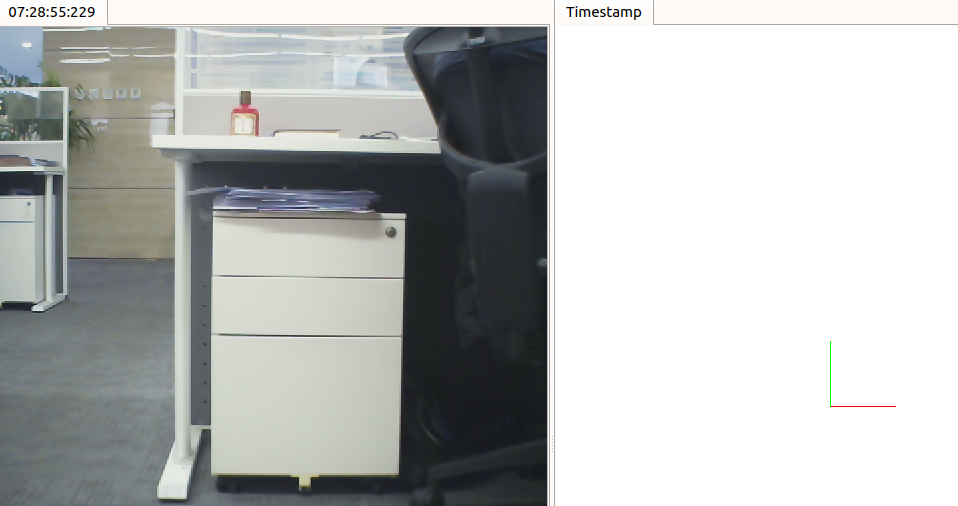
点击一下右侧的雷达窗口,按b键设置背景颜色,选择白色,然后参考大佬AdamShan大佬教程qweasd几个按键调整点云位置直到看到点云。
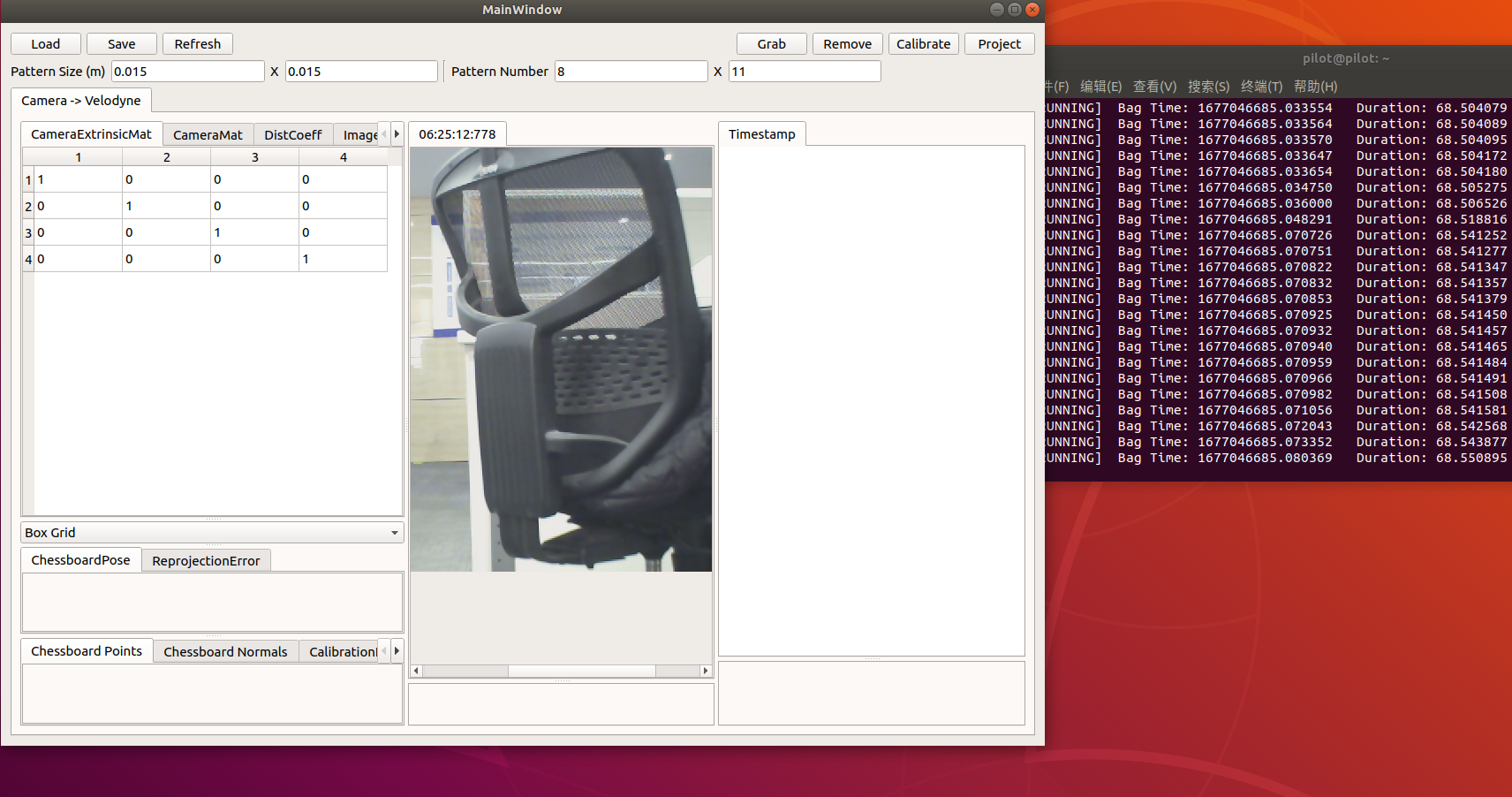
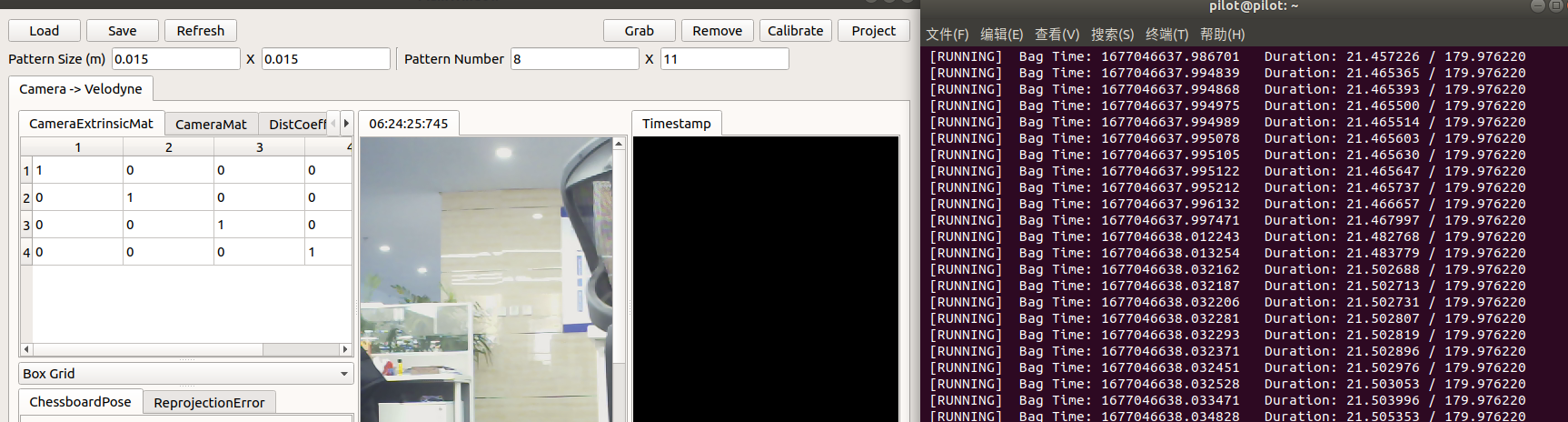
此处本人遇到问题,无法显示雷达部分的界面,雷达窗口处的时间没有变化,显示Timestamp而不是具体时间值。
4.排错、差错
(1)无法显示点云信息
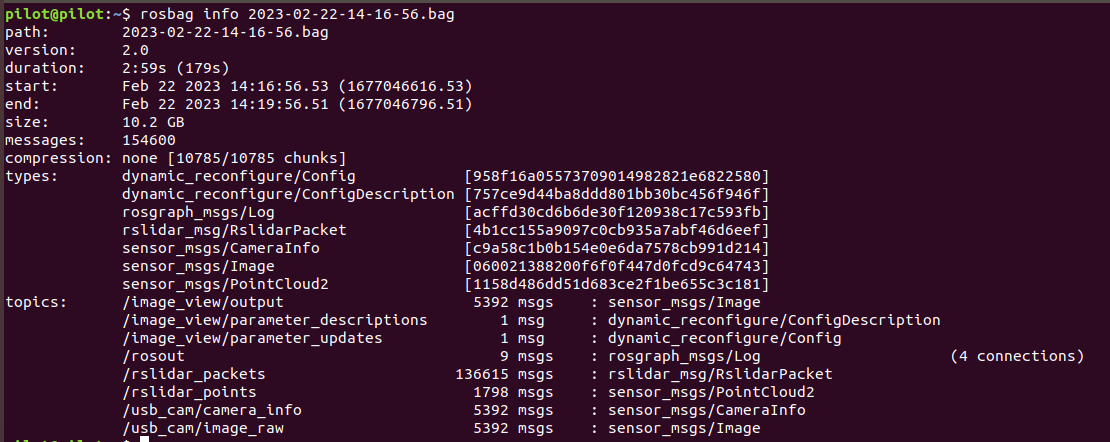
bag的话题信息
git的isuue中找的方法:
rosbag play bagName.bag /YourPointCloud2Topic:=/points_raw
找到问题所在了,在播放bag的时候要添加自己的雷达话题,我的topic在RVIZ的找的
(2)无法grab抓取,抓取时没有反应
初步怀疑是数据包录制的不好,尝试录制新的数据包,新录制的bag包依然不能抓取,点云处识别不到棋盘格。
看到git上关于标定工具的讨论,作者提到,grab不到图像的原因:没有拍摄到棋盘格;棋盘格尺寸设置错误。本人通过和别人教程对比发现棋盘格设置完全错误。
第一,标定板大小设置错误,棋盘格边长是2cm,被误导了
第二,棋盘格角点数错了,也是被误导了
我打印的棋盘格下面有一行备注:www.calib.io|8✖11 Checker Size:15mm,但是实际上,边长2cm,7✖10(格子数目是8*11但是角点是7*10)
5.标定
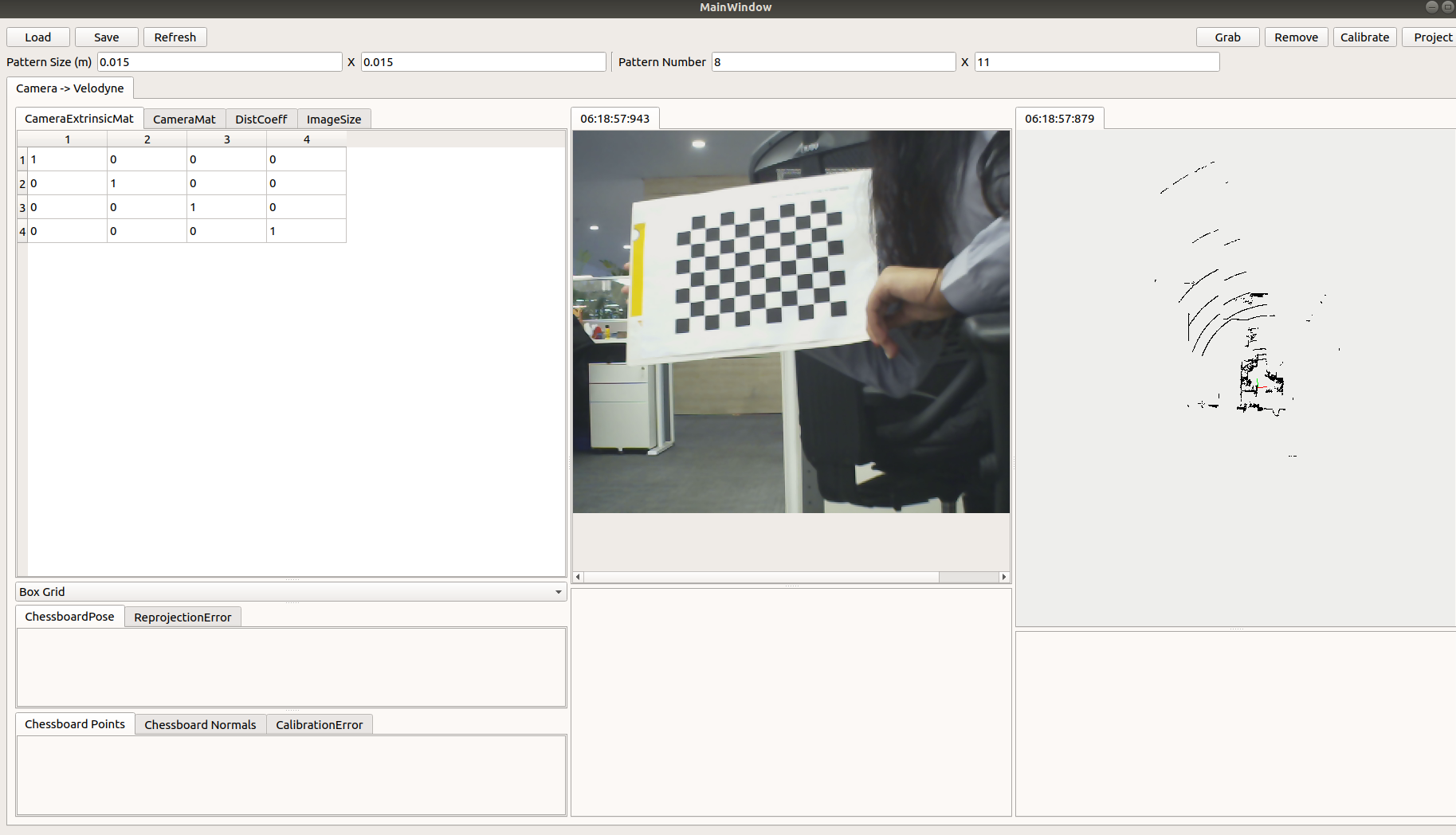
按照前面步骤打开软件,点击点云部分,按⬇键出现坐标轴(忘了叫啥),另外评论区看到点云区域","逗号是放大 "."句号是缩小,上下左右还有那几个字母按键都可以调整;
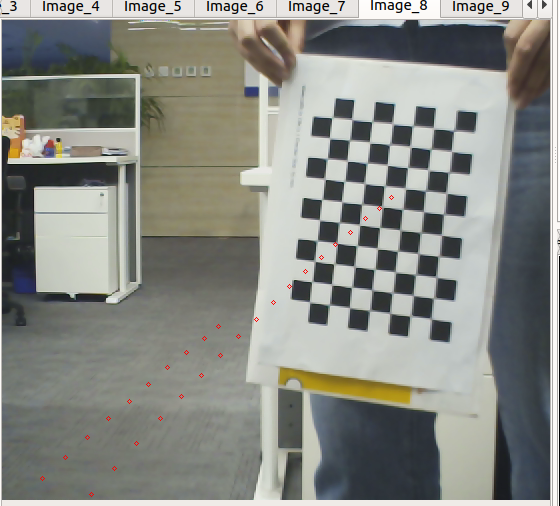
播放点云数据,调整大小;点击grab,对照图像在右下角点云中标注点云直到出现矩阵;标定前要把抓取不好的图像remove掉;点击标定按钮;标定后可以点击project进行验证,大佬说红点分布在标定版是正确的,如果散点不再标定板上重新在右下点云上选点(下图本人选的就不是很好,过程中有几张红点都在标定板上了);最后save保存结果,保存时雷达数据、相机数据不需要保存,选否即可。
至此标定工作完成!!!!有安装Autoware的,可以查看点云-图像融合效果图(可参考下面两篇)本人是单独安装标定工具的,所以无法看融合效果。此标定工具多用几次就熟练了。
下一篇打算记录另外一个相机-雷达标定方法~可以对比一下结果、效果。
欢迎交流、欢迎打赏🤪~打赏基金将全部被我花掉!!!
提供一个制作标定板的链接:
https://calib.io/pages/camera-calibration-pattern-generator
参考教程:
https://blog.csdn.net/weixin_48657767/article/details/126054121?spm=1001.2014.3001.5502
https://blog.csdn.net/AdamShan/article/details/81670732