UE5 ChaosVehicles载具研究
一、基本组成
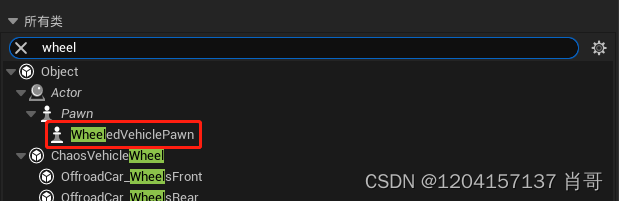
载具Actor类名称:WheeledVehiclePawn
Actor最原始的结构

官方增加了两个摇臂相机,可以像驾驶游戏那样切换多机位、旋转观察
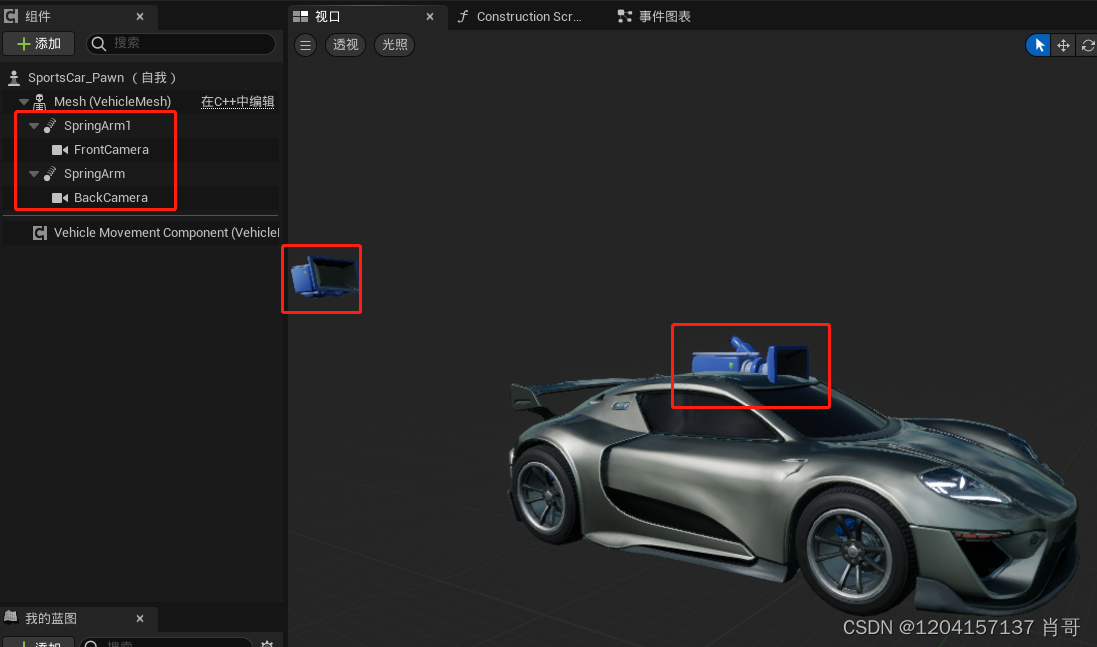
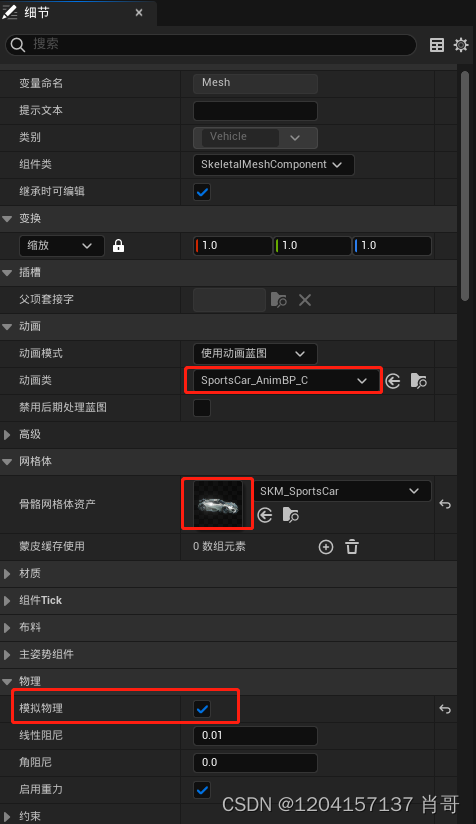
选择骨骼网格体、动画蓝图类、开启物理模拟
二、SportsCar_Pawn
角阻尼:物体旋转的阻力。数值越大,汽车转向越慢

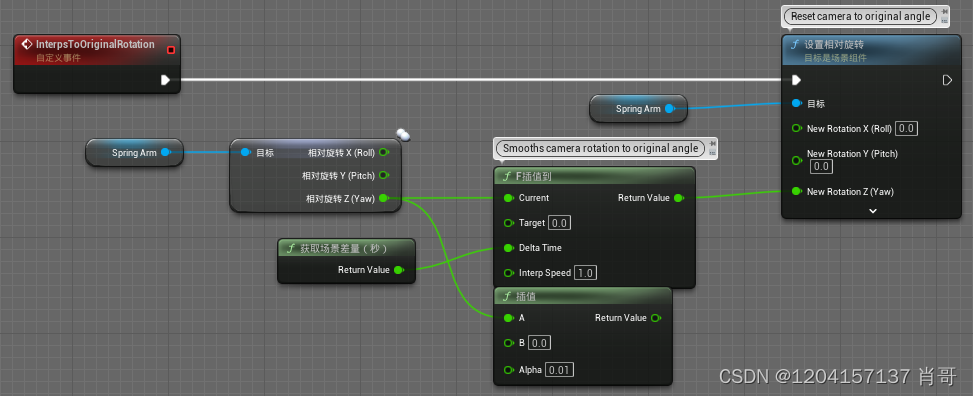
使用插值节点让相机角度的值连续变化至目标值0,实现汽车360度观察后,相机视角自动恢复到初始视角
这里也可以使用Lerp节点来实现
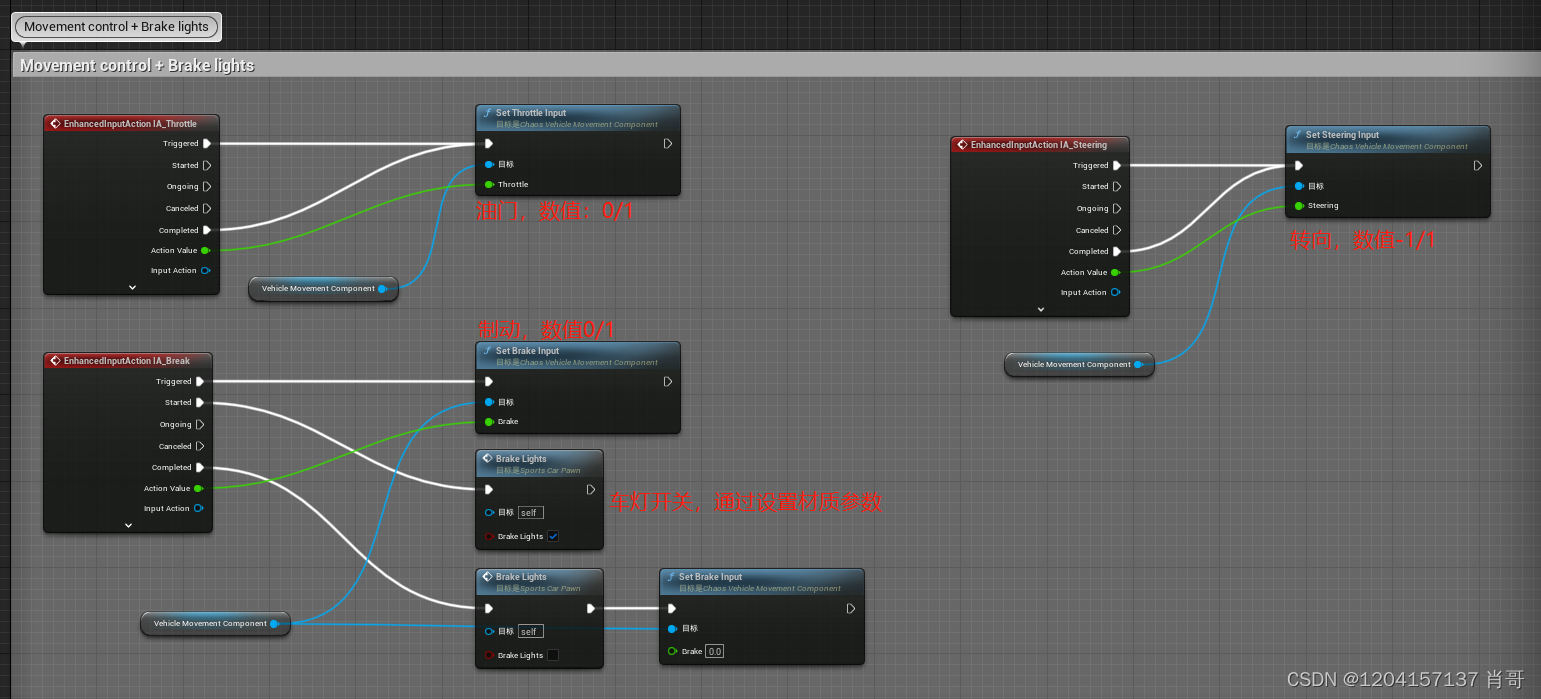
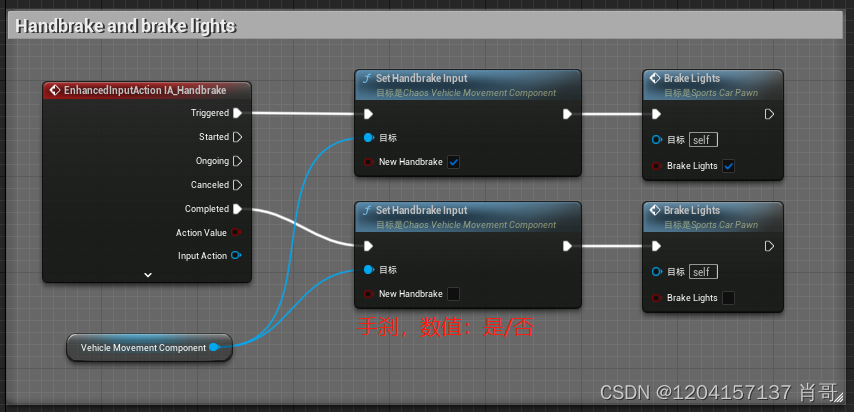
载具控制:油门、制动、转向、手刹。启动后即处于TIick运行状态
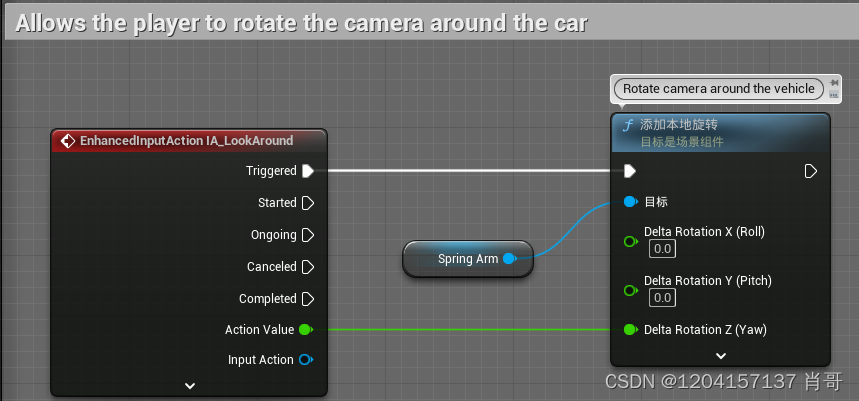
相机施加旋转
切换相机

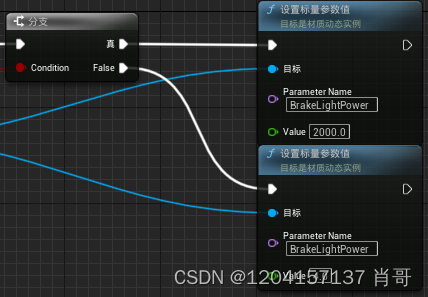
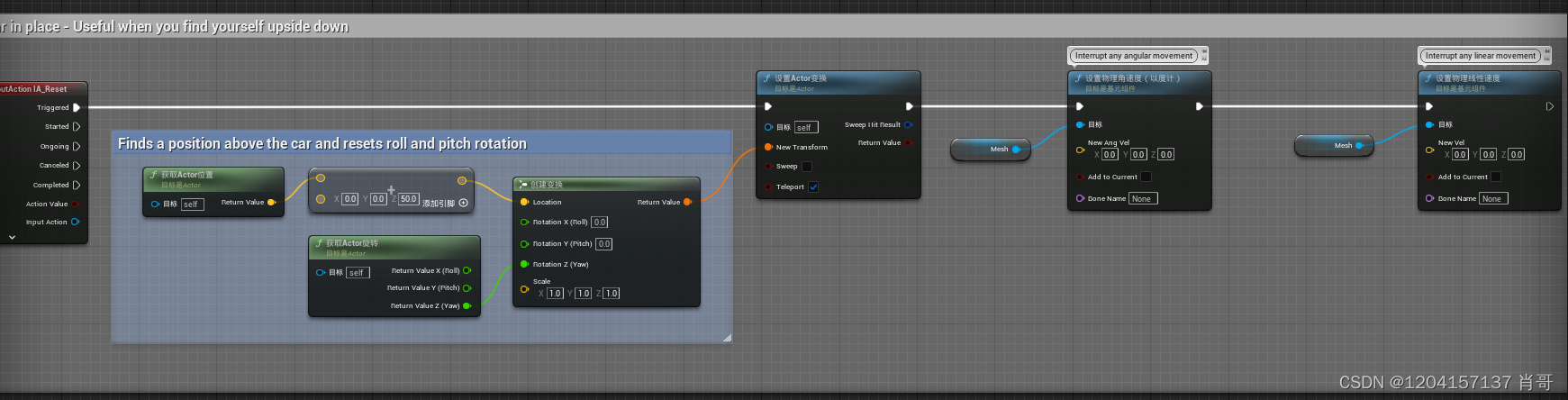
重置汽车状态:Transform、线速度、角速度(特别像GTA)
三、VehiclePlayerController:
新建“输入映射情境”

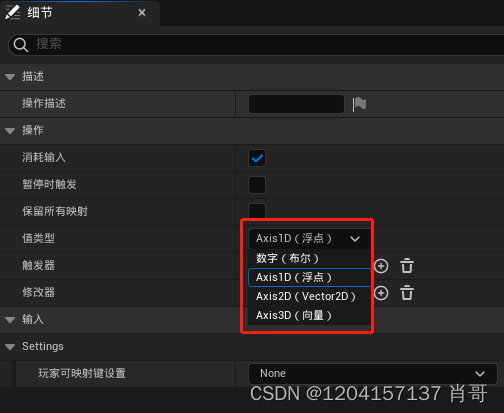
新建“输入操作”,指定要输出的值类型
指定到“输入映射情境”,设置各种平台控制按键
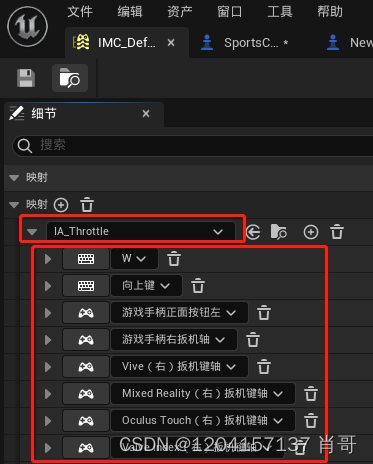
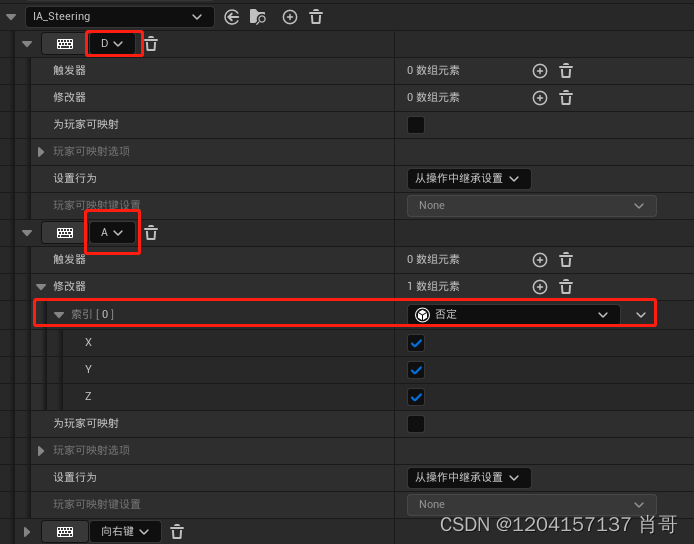
修改器里面可以更改输出的数值、数值曲线、数值否定(反向)等等
汽车左/右转向是相反动作,所以修改器增加了“否定”(注意:UE5汽车载具的前后移动并不是反向动作,因为前后移动的加速度等物理属性并不对等)
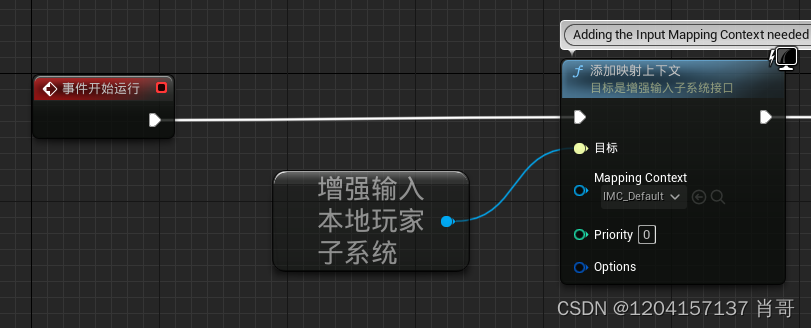
新建玩家控制器,调用“输入映射情境”
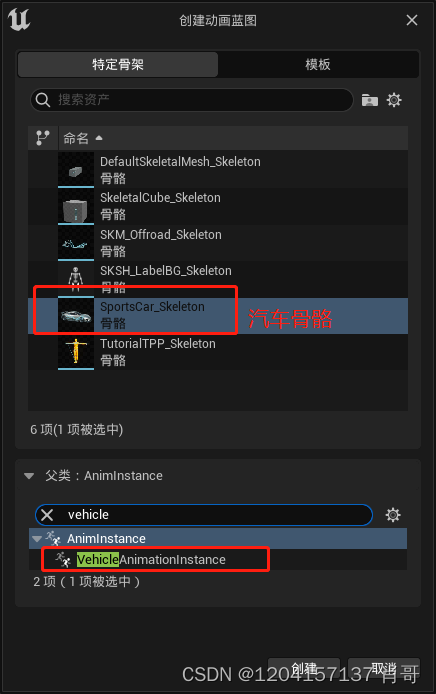
四、SportsCar_AnimBP
创建Vehicle Animation Instance的动画蓝图类
车轮控制器Alpha:车轮转向控制权重值,范围0-1。
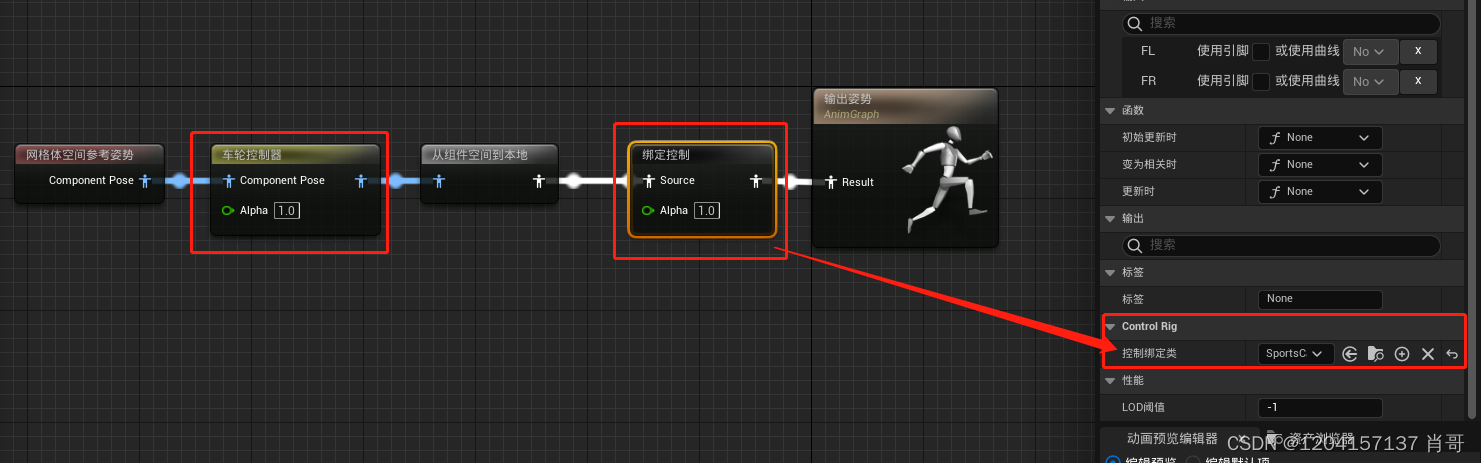
“车轮控制器”节点对应的车轮就是VehicleMovementComponent组件中的“Wheel Setups”
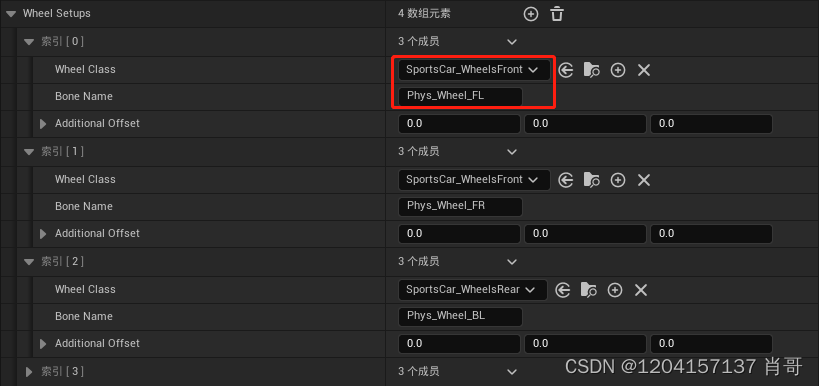
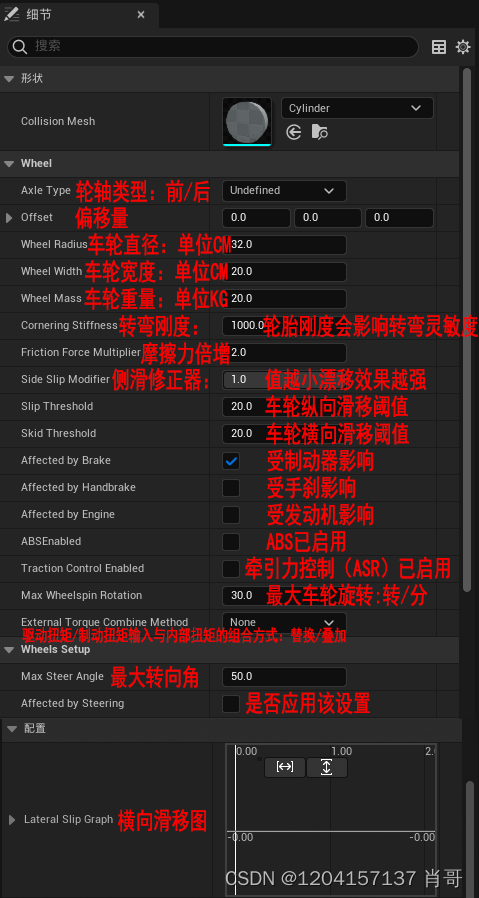
五、SportsCar_WheelsFront/Rear
新建Chaos Vehicle Wheel类Actor,参数详解如下:
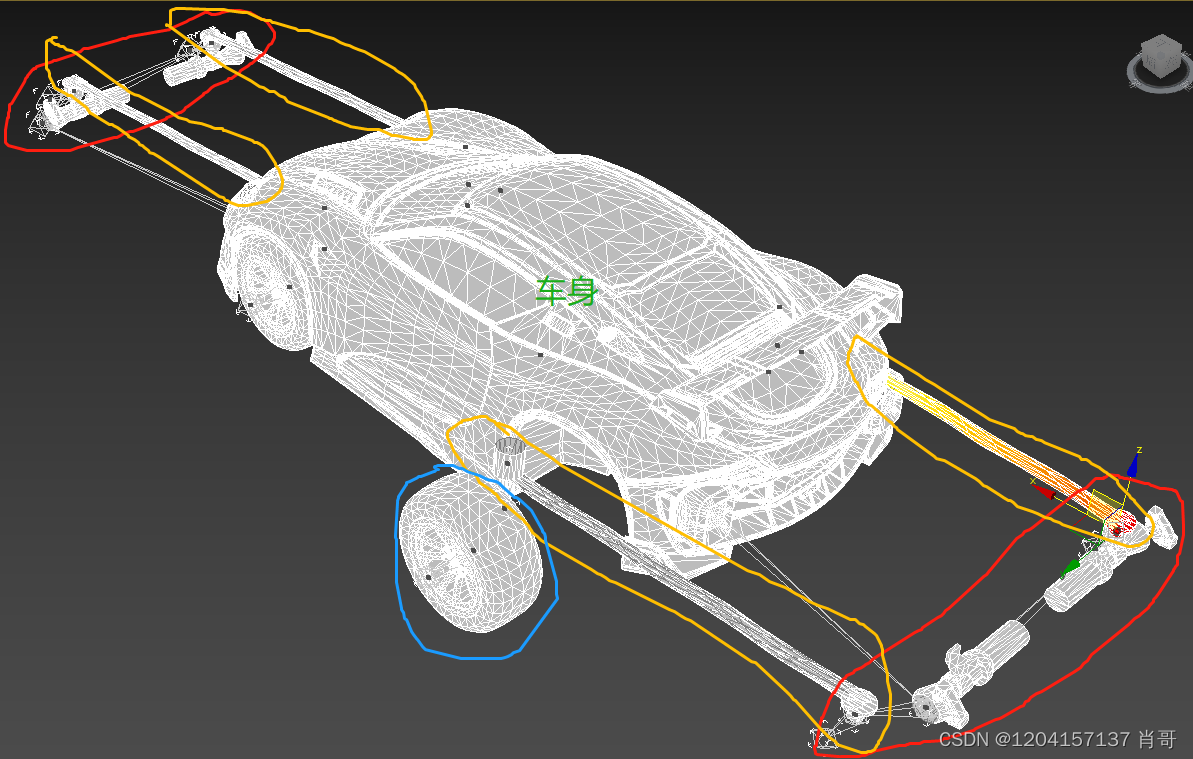
六、SKM_SportsCar的骨骼层级

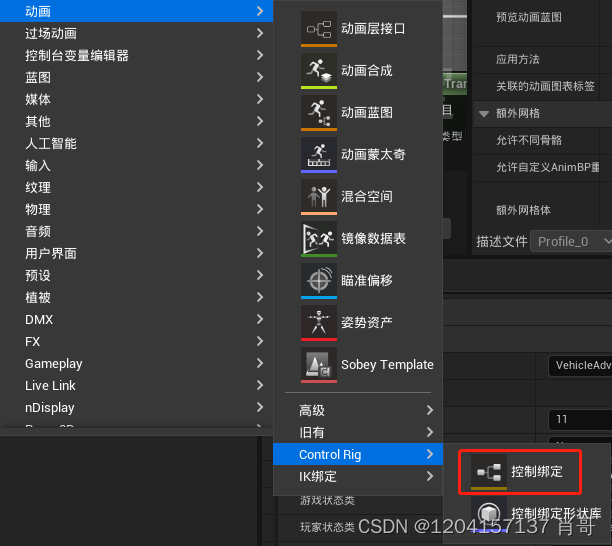
七、SportsCar_CtrlRig:绑定修复
新建Control Rig文件
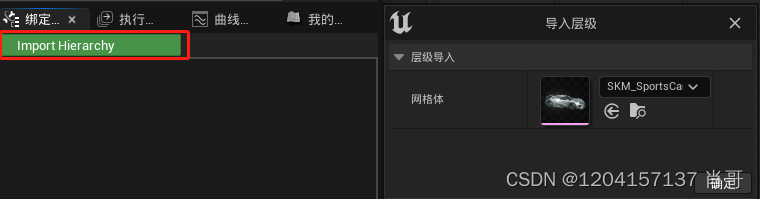
导入骨骼层级
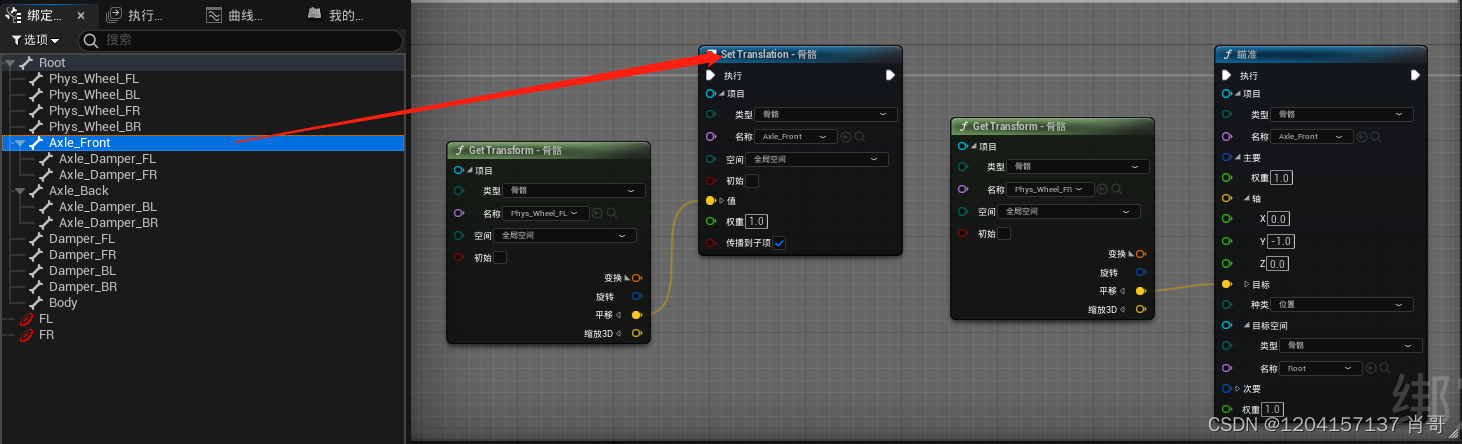
拖入要修复的骨骼,设置骨骼位置和朝向
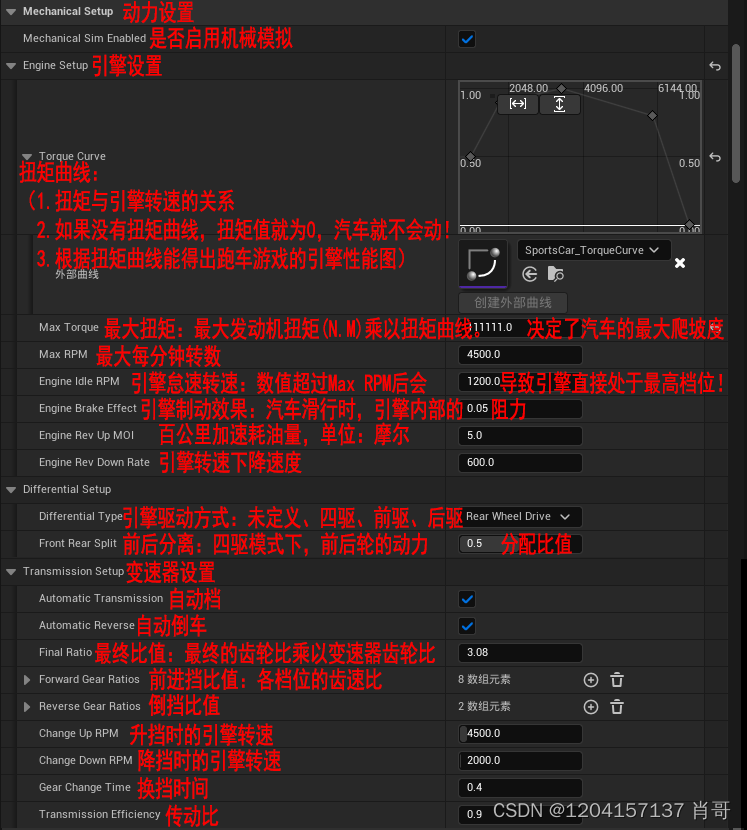
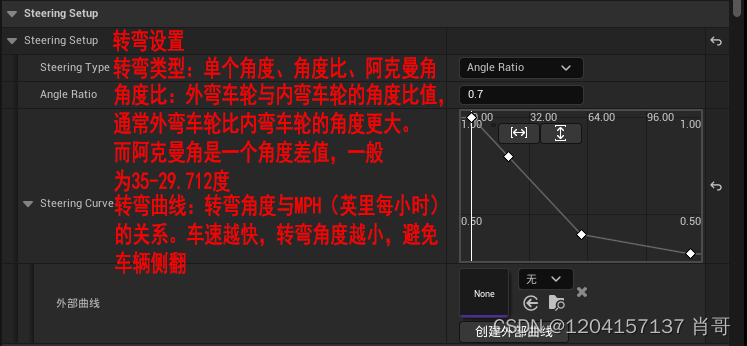
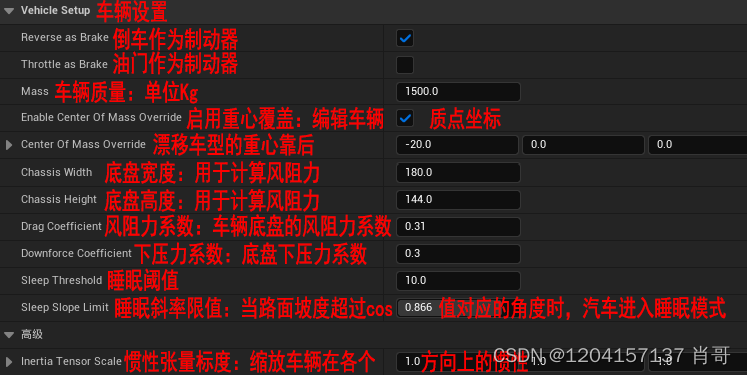
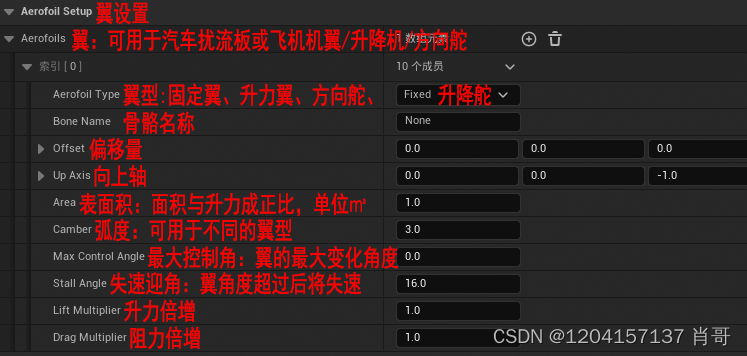
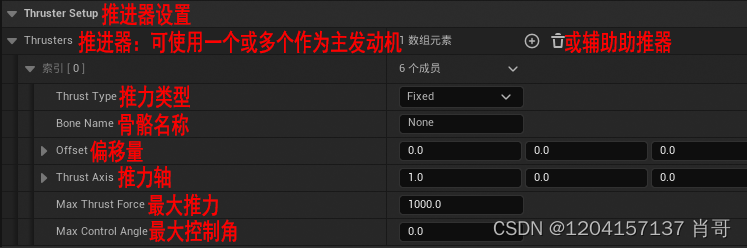
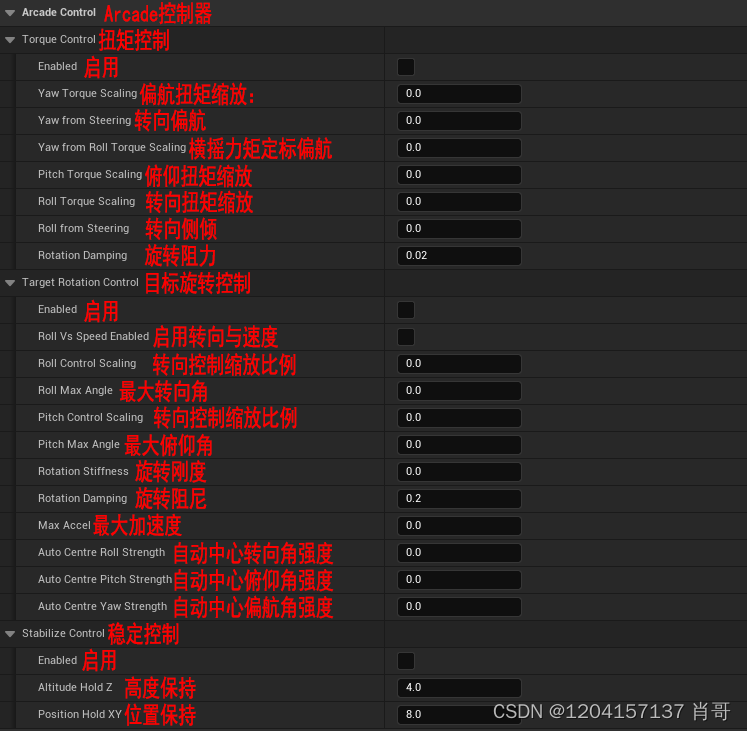
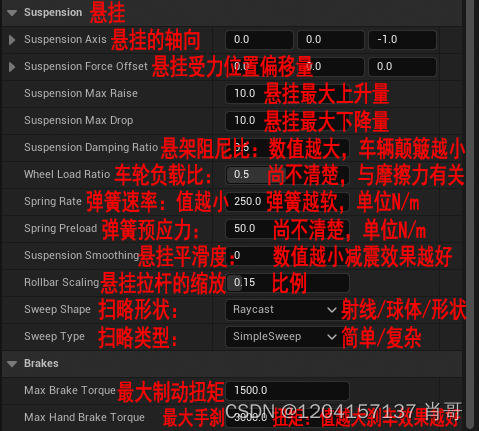
八、VehicleMovementComponent的参数解释