基于PLE结合卡尔曼滤波的RSSI定位算法matlab仿真
目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
1.算法运行效果图预览



2.算法运行软件版本
MATLAB2022a
3.部分核心程序
...............................................................
for Num_xb = Num_xb2Num_xbIndx = Indx + 1;Dis = RoomLength/(Num_xb-1); for m=1:Stimesmrng(m);%生成节点坐标Position_X = (0.7*rand)*RoomLength;Position_Y = (0.7*rand)*RoomWidth;Position = [Position_X,Position_Y];%计算节点到信标的距离for i=1:Num_xbXB(:,i) = [i;(i-1)*Dis;0];Dist(:,i) = sqrt((Position_X-((i-1)*Dis))^2+Position_Y^2);end%基于RSS的定位算法 for i=1:Num_xbNumber_rssi(1,i) = i;%每个信标节点的RSSI值if Dist(i) > Good_radius Number_rssi(2,i) = 0;elseNumber_rssi(2,i) = func_RSSI_cal(Dist(i),Alpha);endendNumber_rssi2 = Number_rssi;Number_rssi_save{m} = Number_rssi;Position_X2{m} = Position_X;Position_Y2{m} = Position_Y;%进行卡尔曼滤波%进行卡尔曼滤波%进行卡尔曼滤波tmps = Number_rssi_save{m}(2,:);kalman_dat2{m} = func_kalman(tmps); Number_rssi(1,:)= Number_rssi_save{m}(1,:);Number_rssi(2,:)= kalman_dat2{m};Position_X = Position_X2{m};Position_Y = Position_Y2{m};%将RSSI值从大到小排列 for i = 1:Num_xbfor j = i:Num_xbif Number_rssi(2,i) < Number_rssi(2,j)a = Number_rssi(1,j);b = Number_rssi(2,j);Number_rssi(2,j) = Number_rssi(2,i);Number_rssi(1,j) = Number_rssi(1,i);Number_rssi(1,i) = a;Number_rssi(2,i) = b;endendend%RSSI值最大的信标的距离for i=1:Best_xbDist(i) = Dis*( (func_RSSI_cal(Dis,Alpha)/Number_rssi(2,i))^(1/2.8) );end%求未知节点坐标for i=1:Best_xbBeaconn(1,i) = XB(2,Number_rssi(1,i));Beaconn(2,i) = XB(3,Number_rssi(1,i));endAll_num=Best_xb; for i=1:2for j=1:(All_num-1)a(i,j) = Beaconn(i,j)-Beaconn(i,All_num);endendA =-2*(a');for i=1:(All_num-1)B(i,1)=Dist(i)^2-Dist(All_num)^2-Beaconn(1,i)^2+Beaconn(1,All_num)^2-Beaconn(2,i)^2+Beaconn(2,All_num)^2;end%计算X坐标X1 = pinv(A'*A)*A'*B;X_pos = X1(1,1);%计算Y坐标z = 0;for j=1:Best_xb z = z + sqrt(abs(Dist(j)^2-(X_pos-Beaconn(1,j))^2));endY_pos = z/Best_xb;Loc = [X_pos;Y_pos];%点位误差error1(m) = sqrt((abs(Position_X-Loc(1)))^2+(abs(Position_Y-Loc(2)))^2);%横坐标误差error2(m) = abs(Loc(1)-Position_X);%纵坐标误差error3(m) = abs(Loc(2)-Position_Y);Number_rssis(:,m) = Number_rssi(2,:); endNumber_rssixb{Indx} = mean(Number_rssis,2);Number_xb{Indx} = [1:Num_xb];
end
figure;
semilogy(Number_xb{1},Number_rssixb{1},'b-o');
grid on;
xlabel('信标数目');
ylabel('RSSI');
legend('信标数:30,RSSI排序后仿真图');
save result.mat Number_xb Number_rssixb
36_001m4.算法理论概述
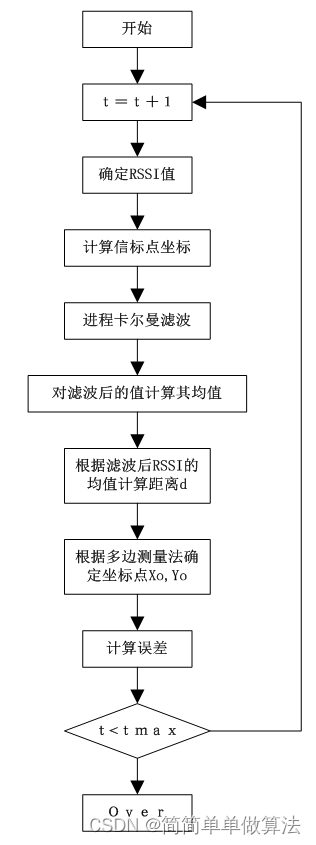
基于PLE(Power-Law Equalizer)结合卡尔曼滤波的RSSI(Received Signal Strength Indicator)定位算法是一种利用无线信号强度进行位置估计的方法。该方法通过PLE算法对RSSI进行预处理,然后使用卡尔曼滤波器对处理后的数据进行位置和速度的估计。其整体流程图如下图所示:
一、基本原理
PLE算法:PLE算法是一种用于提取信号特征的方法,它可以削弱多径效应等干扰因素对RSSI的影响,提高位置估计的准确性。PLE算法的核心思想是对接收到的信号强度进行幂次变换,将非线性关系转化为线性关系。具体公式如下:
Y = X^α
其中,X表示接收到的信号强度,Y表示经过PLE处理后的信号强度,α为PLE算法的参数,需要根据实际环境进行调整。
卡尔曼滤波器:卡尔曼滤波器是一种高效的递归滤波器,它可以通过对过去和现在的测量结果进行加权,估计未来的状态变量。在RSSI定位中,卡尔曼滤波器可以用于估计被定位物体的位置和速度。具体公式如下:
预测步骤:
X_pred = FX_est + BU
P_pred = FP_estF^T + Q
更新步骤:
Z_pred = HX_pred
Y = Z - Z_pred
K = P_predH^T*(HP_predH^T + R)^(-1)
X_est = X_pred + KY
P_est = (I - KH)*P_pred
其中,X_est表示估计的状态变量(即位置和速度),P_est表示估计误差协方差矩阵,F表示状态转移矩阵,B表示控制输入矩阵,U表示控制输入变量,Z表示测量值,H表示观测矩阵,Q表示过程噪声协方差矩阵,R表示测量噪声协方差矩阵,K表示卡尔曼增益矩阵,Y表示测量残差,I表示单位矩阵。
二、算法流程
- 初始化:设定初始位置、速度、PLE算法的参数α、卡尔曼滤波器的参数(F、B、H、Q、R)等。
- PLE处理:对接收到的RSSI进行PLE处理,得到处理后的信号强度。
- 卡尔曼滤波:将处理后的信号强度作为测量值Z,使用卡尔曼滤波器进行位置和速度的估计。
- 更新估计值:根据卡尔曼滤波器的输出结果,更新估计的位置和速度。
- 迭代处理:重复执行步骤2-4,直到达到设定的迭代次数或收敛条件。
- 输出结果:输出最终估计的位置和速度。
三、优缺点
基于PLE结合卡尔曼滤波的RSSI定位算法具有以下优点:
- 可以削弱多径效应等干扰因素对RSSI的影响,提高位置估计的准确性。
- 通过对过去和现在的测量结果进行加权,可以减小测量噪声对位置估计的影响。
- 可以有效地利用RSSI的时空相关性,提高位置估计的稳定性。
- 具有较好的鲁棒性和适应性,可以适用于不同的环境和应用场景。
5.算法完整程序工程
OOOOO
OOO
O