基于matlab实现的卡尔曼滤波匀加速直线运动仿真
完整程序:
clear
clc
%% 初始化参数
delta_t = 0.1; %采样时间
T = 8; %总运行时长
t = 0:delta_t:T; %时间序列
N = length(t); %序列的长度
x0 = 0; %初始位置
u0 = 0; %初速度
U = 10; %控制量、加速度
F = [1 delta_t
0 1]; %状态转移矩阵
B = [0.5*delta_t^2
delta_t]; %控制矩阵
H = [1 0]; %观测矩阵
W = [0;3]; %过程噪声
V = [70]; %量测噪声
%分配空间
XP = zeros(2,N);%预测值
XP(:,1) = [x0;u0];
XR = zeros(2,N);%真实值
XR(:,1) = [x0;u0];
Z = zeros(1,N);%观测值
Z(1) = [0];
for i=2:N
XP(:,i) = F*XP(:,i-1)+B*U; %预测值
XR(:,i) = F*XR(:,i-1)+B*U+sqrt(W)*randn; %真实值
Z(i) = H*XR(:,i)+sqrt(V)*randn; %观测值
end
%% 卡尔曼滤波%%
%初始化参数
Xk = zeros(2,N); %最优估计值
Xk(:,1) = [0;0];
P = [1,0;0,1]; %均方误差
I = eye(2);
Q = [0 0;0 0.1];
R = 10;
for i=2:N
%时间更新
X_pre = F*Xk(:,i-1)+B*U; %状态预测值
P_pre = F*P*F'+Q; %预测均方误差
%量测更新
Kg = P_pre*H'*inv(H*P_pre*H'+R); %计算卡尔曼增益
Xk(:,i) = X_pre+Kg*(Z(:,i)-H*X_pre); %状态估计值
P = (I-Kg*H)*P_pre; %均方误差
end
%% 结果
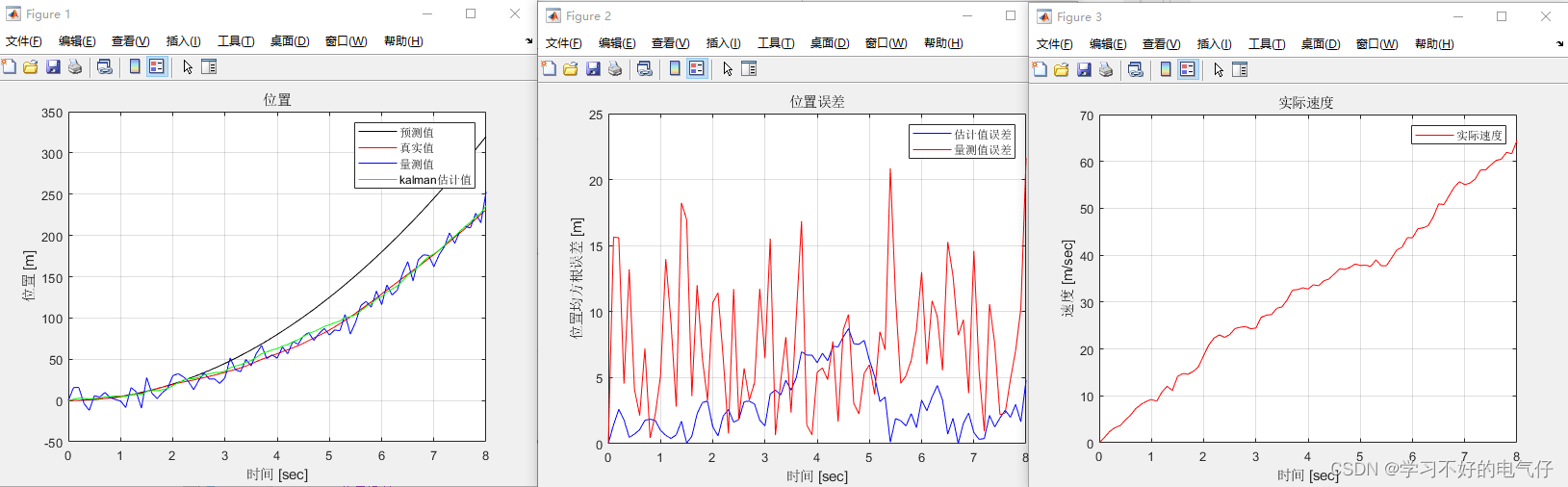
figure(1)
plot(t,XP(1,:),'K');hold on
grid on
plot(t,XR(1,:),'r');hold on
plot(t,Z(:),'b');
legend('预测值', '真实值','量测值');
title('位置')
xlabel('时间 [sec]')
ylabel('位置 [m]')
hold on
plot(t,Xk(1,:),'g');
legend('预测值', '真实值','量测值','kalman估计值');
figure(2)
x_error = abs(XR-Xk(1,:));
x_error1 = abs(XR-Z(1,:));
plot(t,x_error(1,:),'b'),grid on;hold on
plot(t,x_error1(1,:),'r');
legend('估计值误差', '量测值误差');
title('位置误差')
xlabel('时间 [sec]')
ylabel('位置均方根误差 [m]')
grid on
hold off;
figure(3)
plot(t,Xk(2,:),'r'),grid on;
title('实际速度 ')
legend('实际速度')
xlabel('时间 [sec]')
ylabel('速度 [m/sec]')
hold off;