Jetson Xavier NX 与飞控(Pixhawk 4 Mini)实现串口通信
一、飞控端配置
首先对 Pixhawk 4 Mini 烧录固件参考
Kakute H7 刷写 px4 固件_想要个小姑娘的博客-CSDN博客
烧录完成后打开 QGroundControl,进入参数设置并搜索 MAV,如下所示
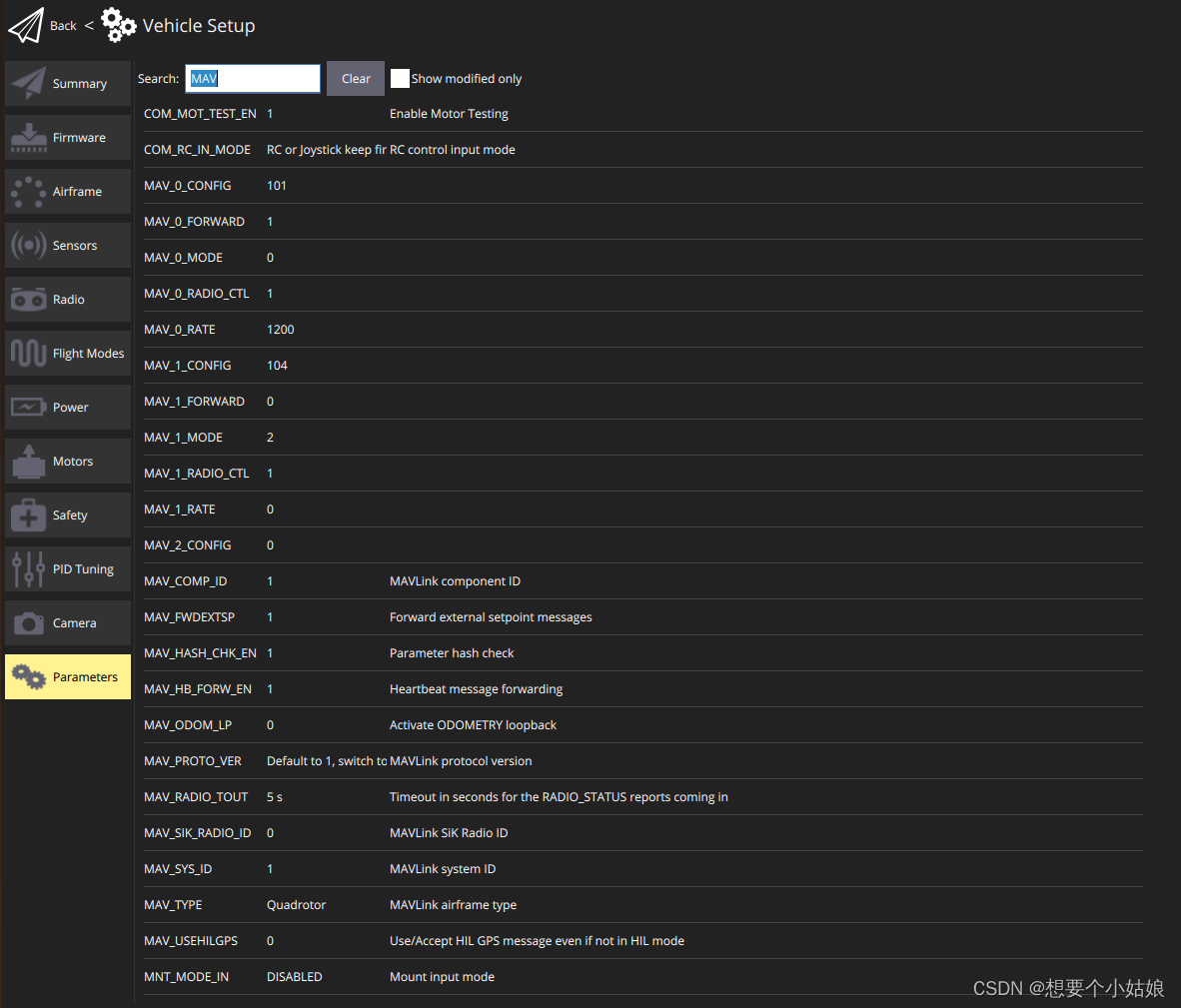
然后修改 MAV_1_CONFIG,修改为自己想要连接机载电脑(Jetson Xavier NX)的端口,在这之前需要先查看 Pixhawk 4 Mini 可用端口
Holybro Pixhawk 4 Mini (Discontinued) | PX4 User Guide

这里我选择使用 2.UART & I2C B 与机载电脑(Jetson Xavier NX)进行通信,查询如下该接口在QGroundControl 中对应的端口
Holybro Pixhawk 4 Mini (Discontinued) | PX4 User Guide
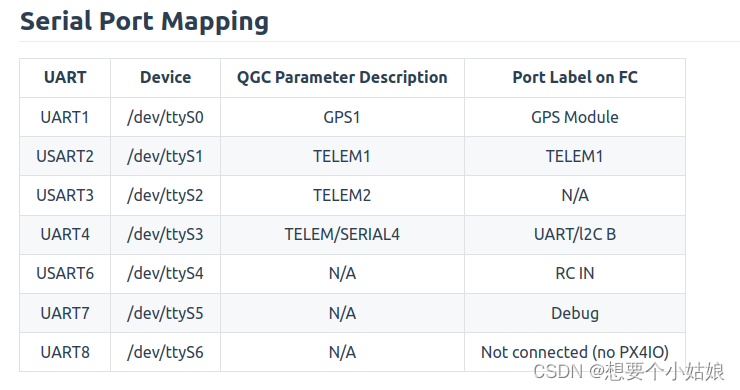 我们发现 UART & I2C B 对应 QGroundControl 中的 TELEM/SERIAL 4 端口,通过查询
我们发现 UART & I2C B 对应 QGroundControl 中的 TELEM/SERIAL 4 端口,通过查询
高级配置 - Full Parameter Reference - 《PX4 用户手册》 - 书栈网 · BookStack
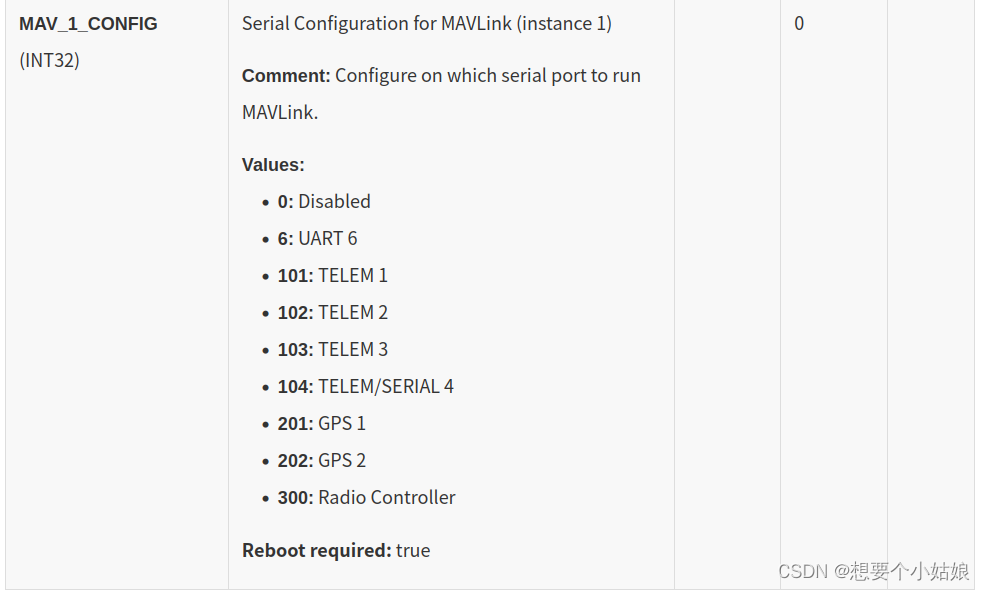
我们发现 TELEM/SERIAL 4接口对应的值为 104,因此我们将 QGroundControl 中 MAV_1_CONFIG 的值修改为 104,
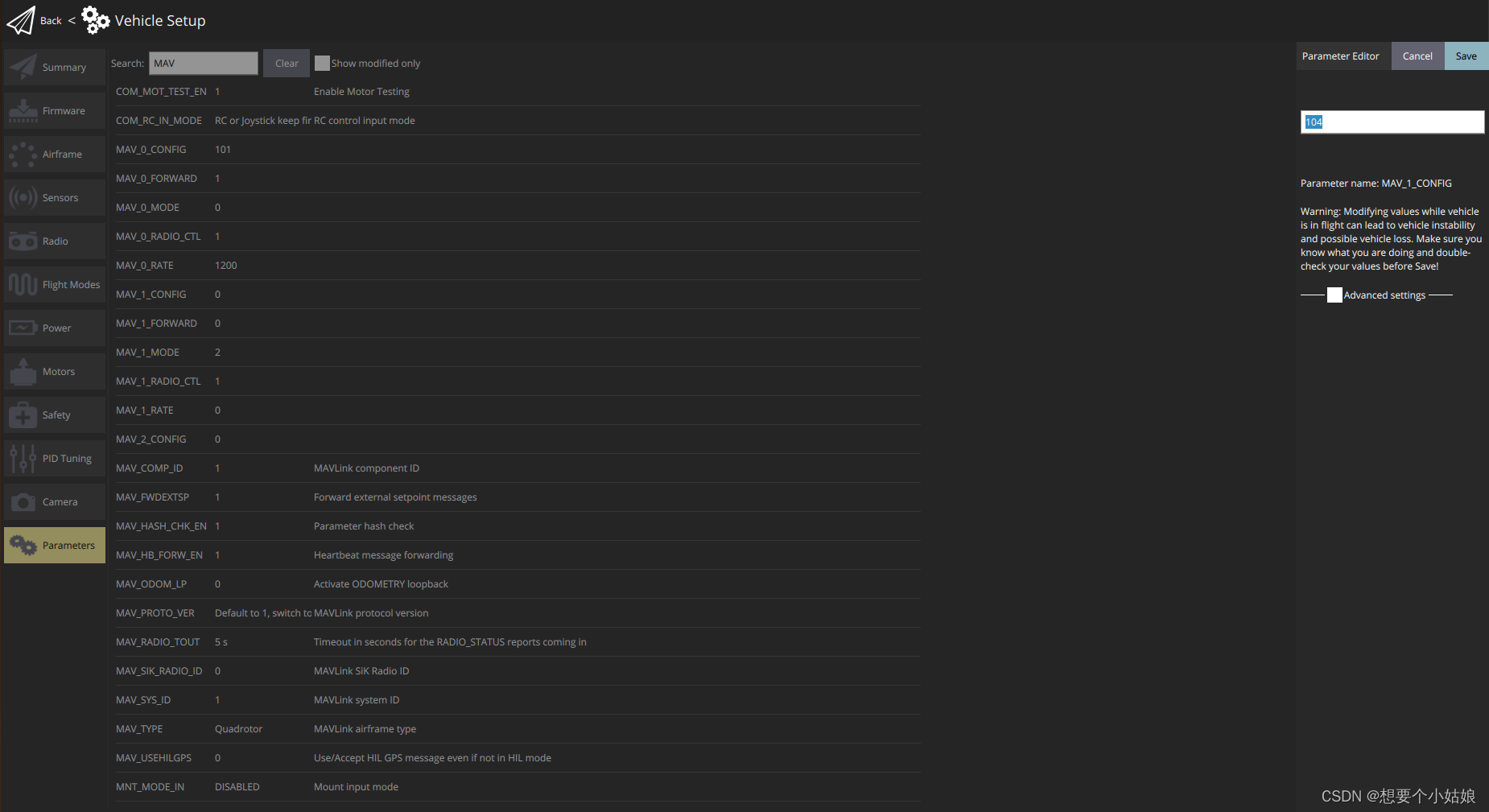
保存后,设置 MAV_1_MODE 的值为 Onboard,
高级配置 - Full Parameter Reference - 《PX4 用户手册》 - 书栈网 · BookStack

也就是将 MAV_1_MODE 的值设置为 2

然后在搜索 SER_TEL,将 SER_TEL4_BAUD 的值设置为 921600 (波特率)。
二、机载电脑端配置
安装 mavros,终端输入
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras -y
sudo wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
chmod +x ./install_geographiclib_datasets.sh
sudo sh ./install_geographiclib_datasets.sh然后修改 mavros 中 px4.launch 文件的通信串口和波特率
roscd mavros
sudo gedit ./launch/px4.launch将串口和波特率修改为 /dev/ttyTHS0 和 921600
<arg name="fcu_url" default="/dev/ttyTHS0:921600" />这样就配置机载电脑端就配置完成了。
三、飞控与机载电脑通信
首先查询飞控(Pixhawk 4 Mini)中 UART&I2C B 的接口情况
Pixhawk 飞控接口线序图 & 常用传感器连接设置(QGC) - 知乎
由于 Pixhawk 4 Mini 与 Pixhawk 4 的端口基本相同,因此我们可以查看 Pixhawk 4 的 UART&I2C B 端口的 Pinout 情况
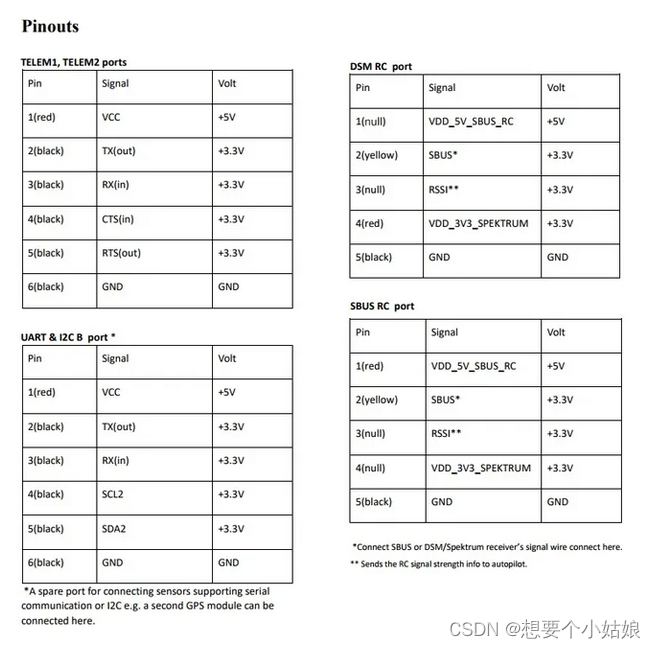
我们发现 UART & I2C B 端口的 2 号口是信号输出(TX),3 号口是信号输入 (RX),6号口是地线(GND),因此我们只需要这三个接口连到机载电脑(Jetson Xavier NX)即可。
我们需要查询机载电脑的飞控串口(pinout),用于连接飞控,注意到在 Jetson Xavier NX 上有 40 个针脚(pinout)

可以查询这 40 个串口对应的功能
NVIDIA Jetson Xavier NX GPIO Header Pinout - JetsonHacks
NVIDIA Jetson Xavier NX使用UART进行串口通信_jetson nx上通过串口控制云台-CSDN博客
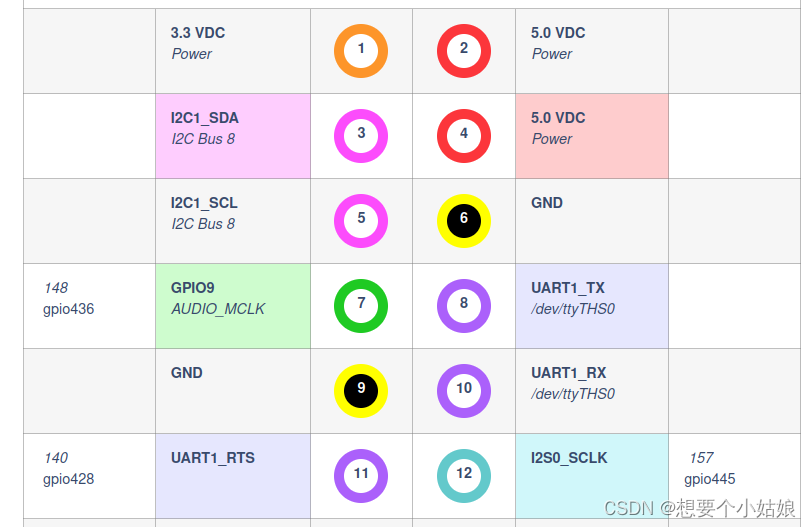
我们这里需要的是 6 号串口(GND), 8 号串口(TX),10 号串口(RX),它们与飞控的连接方式为 GND —— GND,TX —— RX, RX —— TX,也就是
飞控端 UART & I2C B 的 2 号端口 ——> Jetson Xavier NX 端 10 号串口
飞控端 UART & I2C B 的 3 号端口 ——> Jetson Xavier NX 端 8 号串口
飞控端 UART & I2C B 的 6 号端口 ——> Jetson Xavier NX 端 6 号串口
接线对应如图所示(黑——黑,白——白,蓝——蓝)
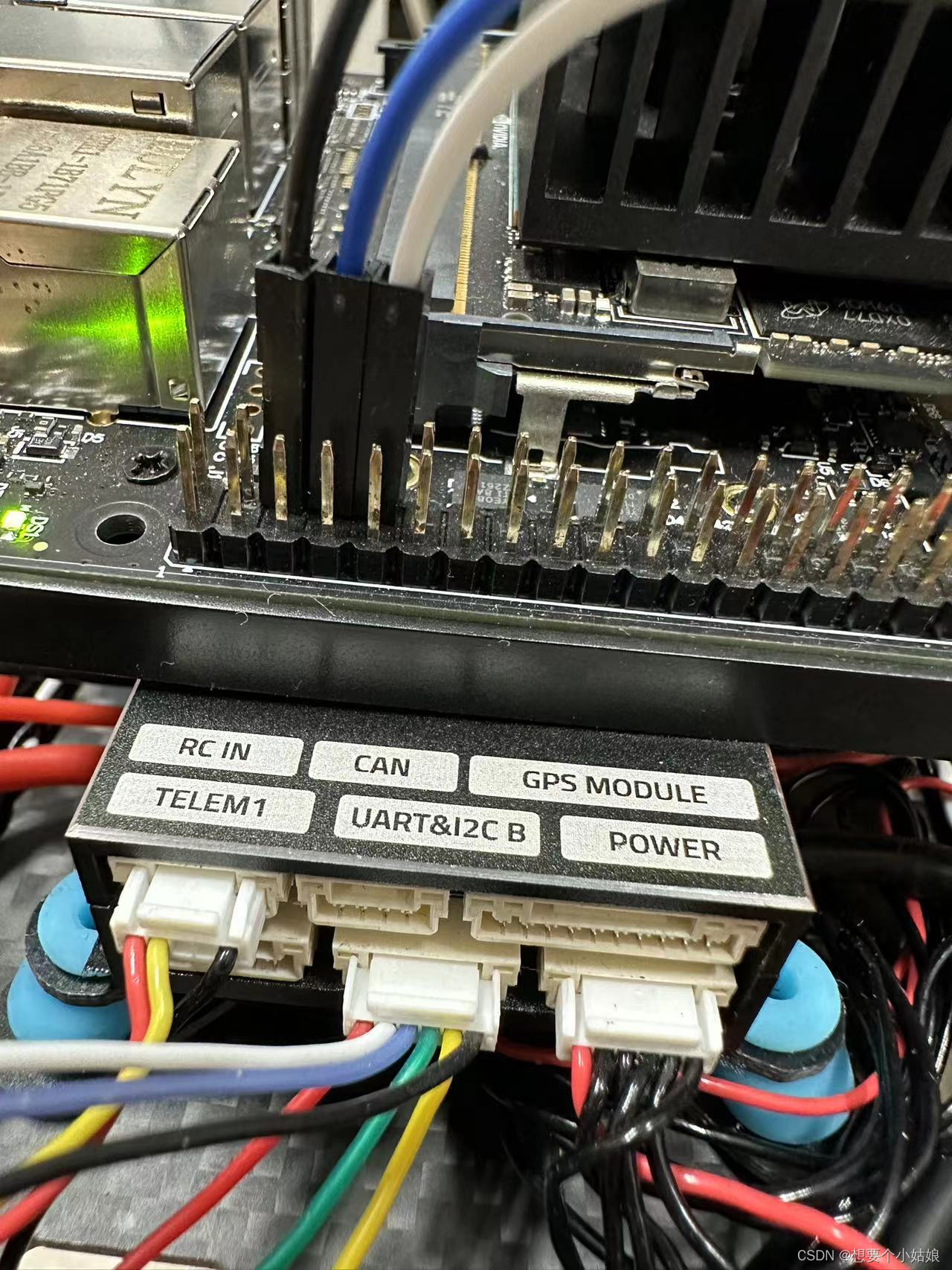
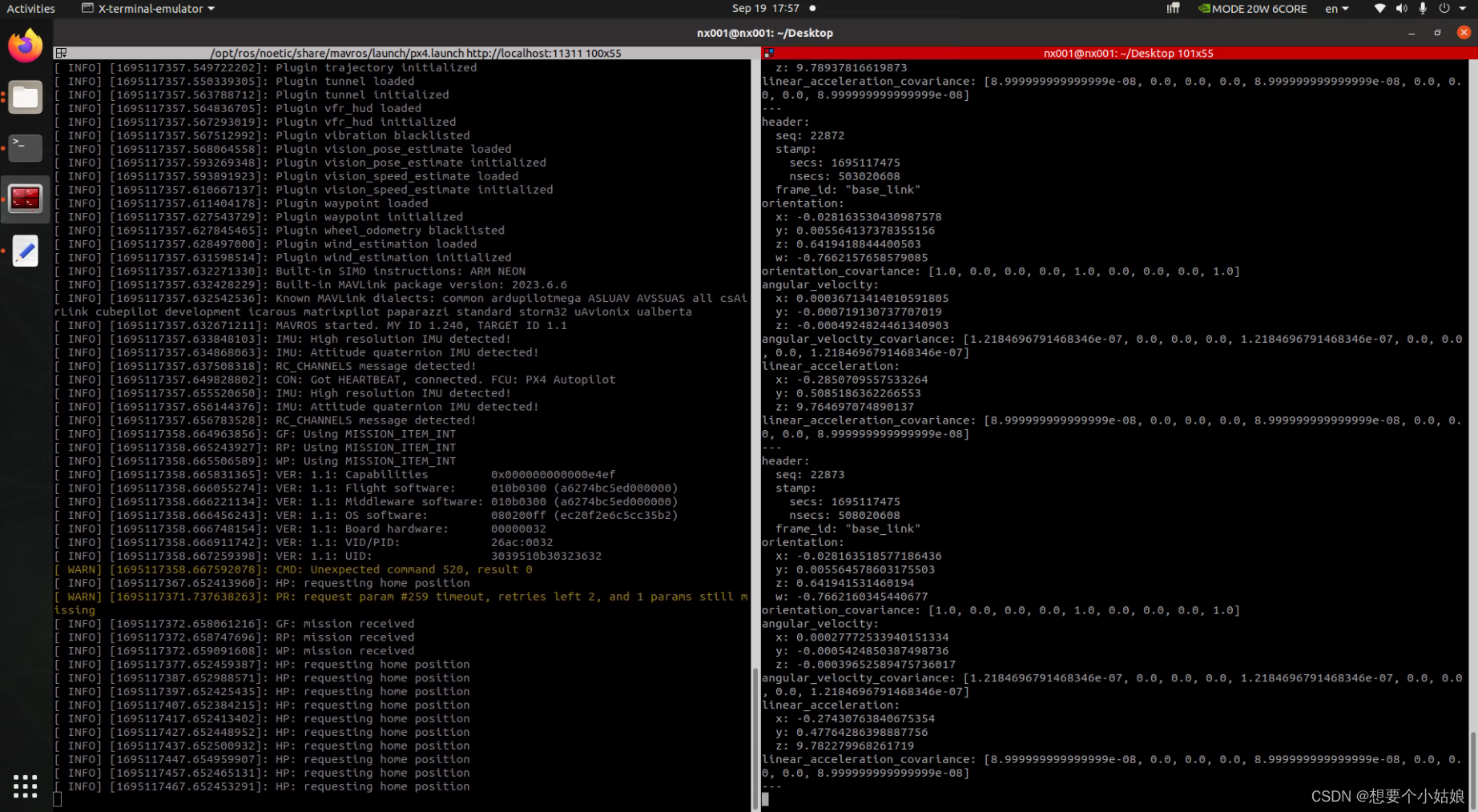
至此接线就完成了,最后在机载电脑端启动 mavros 即可实现 机载电脑与飞控的通信。
终端输入
sudo chmod 777 /dev/ttyTHS0
roslaunch mavros px4.launch启动一个新的终端,输入
rostopic echo /mavros/imu/data此时只要能够打印出飞控 imu 的信息就说明 飞控与机载电脑实现了通信