驱动开发,IO多路复用实现过程,epoll方式
1.框架图
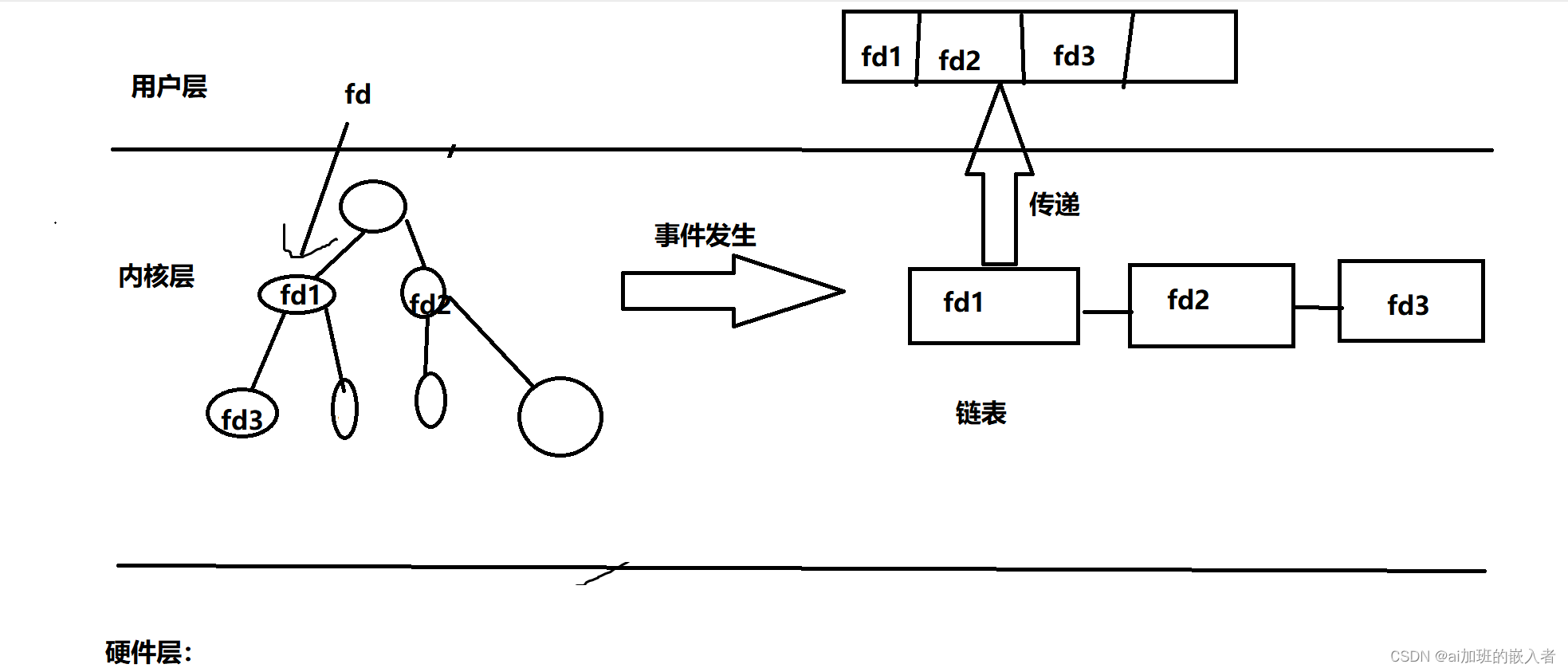
被称为当前时代最好用的io多路复用方式;
核心操作:一棵树(红黑树)、一张表(内核链表)以及三个接口;
思想:(fd代表文件描述符)
epoll要把检测的事件fd挂载到内核空间红黑树上,遍历红黑树,调用每个fd对应的操作方法,找到发生事件的fd,如果没有发生事件的fd,进程休眠,如果事件发生,将发生事件的fd拷贝一份放到内核链表,每个节点对应一个fd,最后把链表的节点信息传递到用户空间的数组中,用户空间无需判断事件的发生,需要判断事件类型(读写等);
2.代码
---pro1.c---应用程序(epoll方式)
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/ioctl.h>
#include <sys/select.h>
#include <sys/time.h>
#include <sys/epoll.h>int main(int argc, const char *argv[])
{int fd1,fd2,epfd;char buf[128] = {0};struct epoll_event event; //用于操作epollstruct epoll_event events[10]; //用户空间存放发生事件的数组//创建epoll句柄,红黑树根节点epfd = epoll_create(1);if(epfd < 0){printf("epoll_create fail\n");exit(-1);}//打开设备文件fd1 = open("/dev/input/mouse0", O_RDWR);if (fd1 < 0){printf("鼠标事件文件失败\n");exit(-1);}fd2 = open("/dev/myled0", O_RDWR);if (fd2 < 0){printf("自定义事件文件失败\n");exit(-1);}//添加准备就绪事件到epollevent.events = EPOLLIN; //读事件event.data.fd = fd1;if((epoll_ctl(epfd,EPOLL_CTL_ADD,fd1,&event)) < 0){printf("epoll_ctl fd1 fail\n");}event.events = EPOLLIN; //读事件event.data.fd = fd2;if((epoll_ctl(epfd,EPOLL_CTL_ADD,fd2,&event)) < 0){printf("epoll_ctl fd2 fail\n");}//监听时间是否发生while(1){//成功接收返回时间的个数,放入events数组中int ret = epoll_wait(epfd,events,10,-1);if(ret < 0){printf("epoll_wait fail\n");exit(-1); }int i;//循环遍历数组,做事件的处理for(i=0; i<ret; i++){if(events[i].events & EPOLLIN) //发生事件是读事件{read(events[i].data.fd,buf,sizeof(buf));printf("buf:%s\n",buf);memset(buf,0,sizeof(buf));}}}close(fd1);close(fd2);return 0;
}
---pro2.c---应用程序(模拟自定义设备数据就绪)
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <stdlib.h>int main(int argc, const char *argv[])
{char buf[128] = "hello world";int fd = open("/dev/myled0", O_RDWR);if (fd < 0){printf("打开设备文件失败\n");exit(-1);}write(fd, buf, sizeof(buf));close(fd);return 0;
}---epoll.c---驱动程序
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include <linux/wait.h>
#include<linux/poll.h>char kbuf[128] = {0};
unsigned int major;
struct class *cls;
struct device *dev;
unsigned int condition = 0;// 定义一个等待队列头
wait_queue_head_t wq_head;// 封装操作方法
int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{int ret;ret = copy_to_user(ubuf, kbuf, size);if (ret){printk("copy_to_ user err\n");return -EIO;}condition = 0; // 下一次硬件数据没有就绪return 0;
}
ssize_t mycdev_write(struct file *file, const char *ubuf, size_t size, loff_t *lof)
{int ret;// 从用户拷贝数据,模拟硬件数据ret = copy_from_user(kbuf, ubuf, size);if (ret){printk("copy_from_user err\n");return -EIO;}condition = 1;wake_up_interruptible(&wq_head);return 0;
}
//封装POLL方法
__poll_t mycdev_poll(struct file *file, struct poll_table_struct *wait)
{__poll_t mask = 0;//向上提交等待队列头poll_wait(file,&wq_head,wait);//根据事件是否发生给一个合适的返回值if(condition){mask = POLLIN;}return mask;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}struct file_operations fops = {.open = mycdev_open,.read = mycdev_read,.poll = mycdev_poll,.write = mycdev_write,.release = mycdev_close,
};// 入口函数
static int __init mycdev_init(void)
{//初始化等待队列init_waitqueue_head(&wq_head);major = register_chrdev(0, "myled", &fops);if (major < 0){printk("字符设备驱动注册失败\n");return major;}printk("字符设备驱动注册成功:major=%d\n", major);// 向上提交目录cls = class_create(THIS_MODULE, "MYLED");if (IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录成功\n");// 向上提交设备节点信息int i;for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "myled%d", i);if (IS_ERR(dev)){printk("向上提交设备节点信息失败\n");return -PTR_ERR(dev);}}printk("向上提交设备节点信息成功\n");return 0;
}// 出口函数
static void __exit mycdev_exit(void)
{// 销毁设备节点信息int i;for (i = 0; i < 3; i++){device_destroy(cls, MKDEV(major, i));}// 销毁目录信息class_destroy(cls);// 字符设备驱动注销unregister_chrdev(major, "myled");
}// 声明
// 入口函数地址
module_init(mycdev_init);
// 出口函数地址
module_exit(mycdev_exit);
// 遵循的GPL协议
MODULE_LICENSE("GPL");
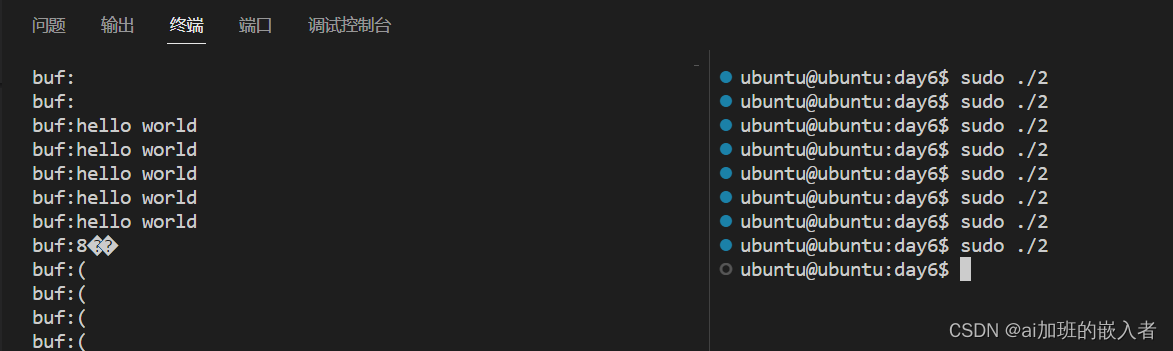
3.测试结果
执行pro2.c,自定义事件被监听到;
在ubuntu上动鼠标,鼠标事件被监听;