STM32单片机——串口通信(轮询+中断)
STM32单片机——串口通信(轮询+中断)
- 串口通信相关概念
- HAL库解析及CubeMX工程配置与程序设计
- 常用函数介绍
- CubeMX工程配置
- HAL库程序设计(轮询+中断)
- 轮询数据收发
- 中断收发数据
- 固件库程序设计及实现
- 固件库配置流程
- 结构体配置及初始化程序
- 串口发送自定义函数封装
- 中断服务函数(数据接收)
- 串口常用函数汇总
串口通信相关概念
- 参考博文:STM32通信——串口通信概念详解
HAL库解析及CubeMX工程配置与程序设计
常用函数介绍
-
串口发送/接收函数
HAL_UART_Transmit(); //串口发送数据,轮询发送 HAL_UART_Receive(); //串口接收数据,轮询发送 HAL_UART_Transmit_IT(); //串口中断模式发送 HAL_UART_Receive_IT(); //串中断模式接收函数原型参数解析:
以阻塞的方式发送指定字节的数据HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, const uint8_t *pData, uint16_t Size, uint32_t Timeout)参数 解析 UART_HandleTypeDef huart UART_HandleTypeDef 结构体类型指针变量 uint8_t * pData 指向要发送的数据地址 uint16_t Size 要发送的数据大小,以字节为单位 uint32_t Timeout 设置的超时时间,以ms单位 以中断的方式接收指定字节的数据
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)此函数执行完后将清除中断,需要再次调用以重新开启中断
参数 解析 UART_HandleTypeDef huart UART_HandleTypeDef 结构体类型指针变量 uint8_t * pData 指向接收数据缓冲区 uint16_t Size 要发送的数据大小,以字节为单位 -
串口中断回调函数
HAL_UART_IRQHandler(UART_HandleTypeDef*huart); //串中断处理函数 HAL_UART_TxCpltCallback(UART_HandleTypeDef*huart); //发送中断回调函数 HAL_UART_RxCpltCallback(UART_HandleTypeDef*huart); //接收中断回调函数
CubeMX工程配置
- 时钟配置
- 采用外部高速晶振
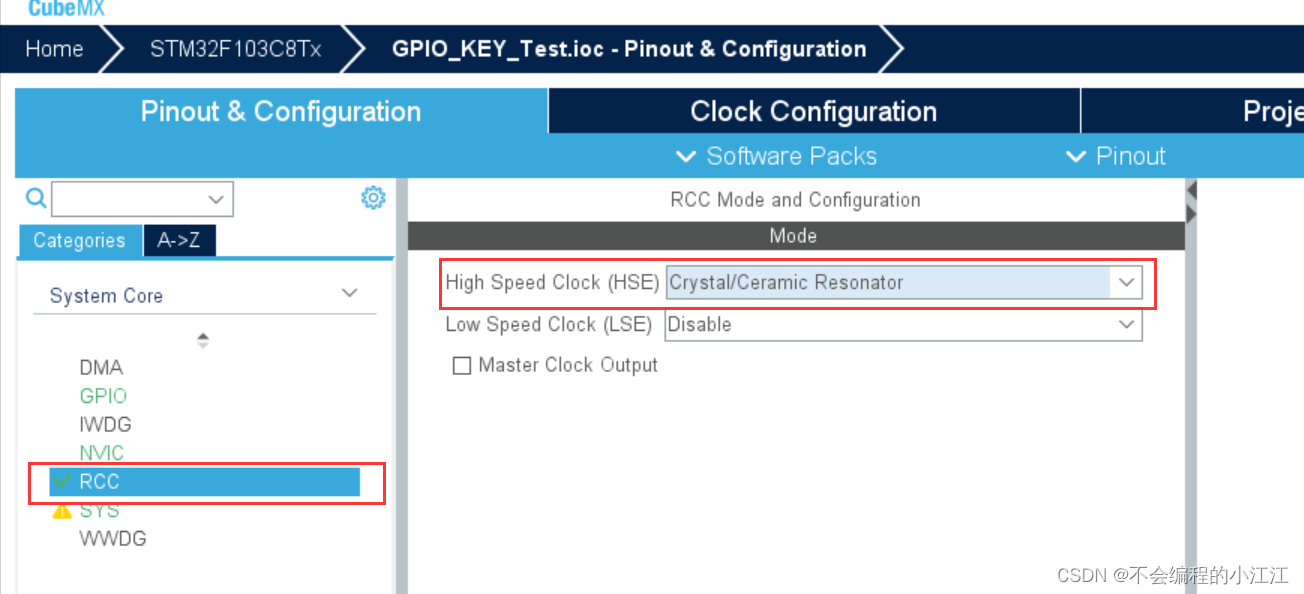
- 时钟树配置

- 采用外部高速晶振
- 配置串口通信
- 配置异步通信模式
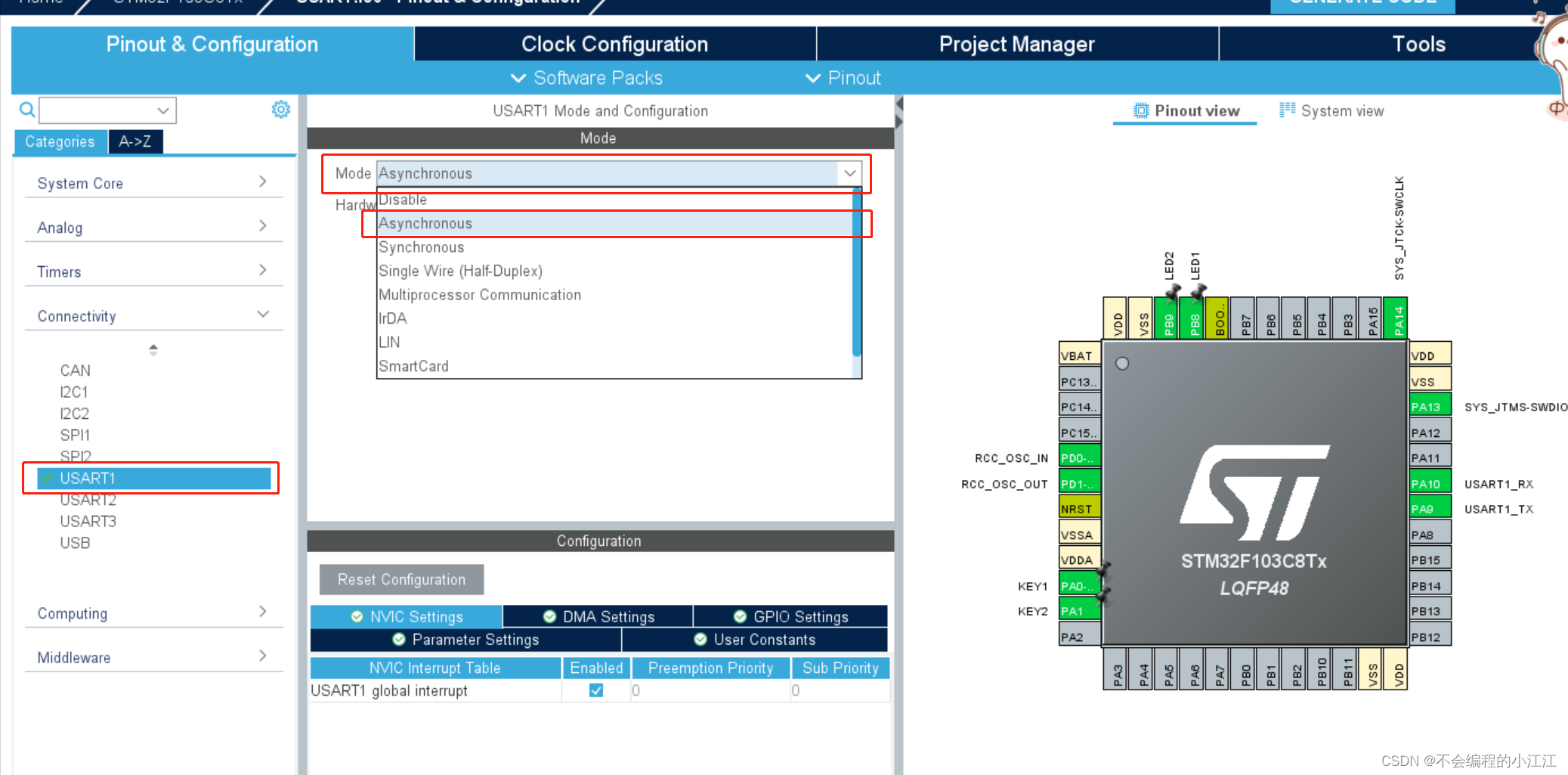
- 串口波特率及参数配置

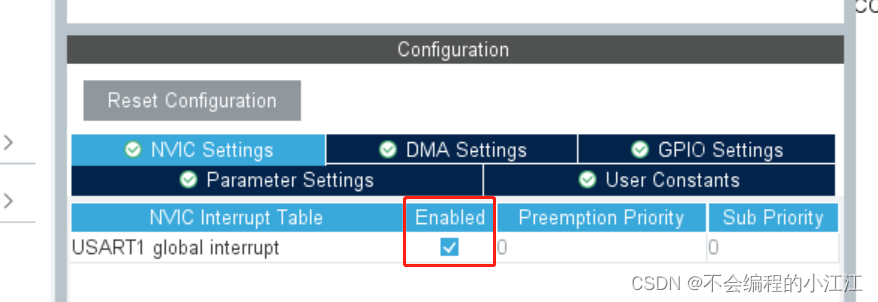
- 打开串口中断(使用中断收发才需配置,轮询可不配置)
- 配置异步通信模式
HAL库程序设计(轮询+中断)
轮询数据收发
- 1. 轮询发送
HAL_UART_Transmit(&huart1,(unsigned char *)"hello world\r\n", strlen("hello world\r\n"),100); - 2. printf重定向
int fputc(int ch, FILE *f) {unsigned char temp[1]={ch};HAL_UART_Transmit(&huart1,temp,1,0xffff);return ch; } - 3. 轮询接收
unsigned char uart1_buf[20] = {0}; //接收数据缓冲区while(1) {HAL_UART_Receive(&huart1, uart1_buf, 19, 100);HAL_UART_Transmit(&huart1, uart1_buf, strlen(uart1_buf), 100);if(strstr(uart1_buf,"open") != NULL)HAL_GPIO_WritePin(LED2_GPIO_Port,LED2_Pin,GPIO_PIN_RESET);else if( strstr(uart1_buf,"close") != NULL )HAL_GPIO_WritePin(LED2_GPIO_Port,LED2_Pin,GPIO_PIN_SET);memset(uart1_buf, 0, strlen(uart1_buf)); }
中断收发数据
- 1. 中断发送
//usart.c 函数封装 void SendString(UART_HandleTypeDef *huart, char *String) {HAL_UART_Transmit_IT(huart,(uint8_t *)String,strlen(String)); } //main.c 函数调用 SendString(&huart1,"haha\r\n"); - 2. 中断接收
//串口中断接收变量定义 unsigned char UART1_RX_Buffer[256]; //串口接收数组 unsigned char UART1_RX_index = 0; //接收下标计数器 unsigned char UART1_RX_flag = 0; //接收下标计数器 //开启接收中断,一次接收1个字符 HAL_UART_Receive_IT(&huart1, (uint8_t *)&RX_ch, 1);//中断服务函数 void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {unsigned char RX_ch = '\0'; //接收中断缓冲if(huart->Instance == USART1){if(UART1_RX_index >= 255) //溢出判断{UART1_RX_index = 0;memset(UART1_RX_Buffer,0x00,sizeof(UART1_RX_Buffer));}else //正常接收数据,并放入数组{UART1_RX_Buffer[UART1_RX_index++] = RX_ch; //接收数据转存if((UART1_RX_Buffer[UART1_RX_index-1] == 0x0A)&&(UART1_RX_Buffer[UART1_RX_index-2] == 0x0D)) //判断结束位{HAL_UART_Transmit(&huart1, (uint8_t *)&UART1_RX_Buffer, UART1_RX_index,0xFFFF); //将收到的信息发送出去UART1_RX_index = 0;memset(UART1_RX_Buffer,0x00,sizeof(UART1_RX_Buffer)); //清空数组}}//命令执行语句 对于复杂执行语句立flag, 在main函数中执行if(strstr((const char *)UART1_RX_Buffer,"open") != NULL)HAL_GPIO_WritePin(LED2_GPIO_Port,LED2_Pin,GPIO_PIN_RESET);else if( strstr((const char *)UART1_RX_Buffer,"close") != NULL )HAL_GPIO_WritePin(LED2_GPIO_Port,LED2_Pin,GPIO_PIN_SET);HAL_UART_Receive_IT(&huart1, (uint8_t *)&RX_ch, 1); //再开启接收中断 } }
固件库程序设计及实现
固件库配置流程
- 1.配置时钟:GPIO的时钟,串口的时钟,引脚复用的时钟
- 2.配置GPIO的结构体
- 3.配置串口的结构体
- 4.NVIC中断配置
- 5.数据发送及中断服务函数
结构体配置及初始化程序
-
使能时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //使能USART1时钟 -
使能GPIO口
GPIO_InitTypeDef GPIO_InitStructure; //USART1_TX GPIOA.9 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出//USART1_RX GPIOA.10初始化 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PA10 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA -
串口参数配置
USART_InitTypeDef USART_InitStructure;//USART 初始化设置 USART_InitStructure.USART_BaudRate = bound; //串口波特率 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口1USART_Cmd(USART1, ENABLE); //使能串口1 -
NVIC中断配置
NVIC_InitTypeDef NVIC_InitStructure;//Usart1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接受中断 -
串口1初始化程序
void Usart1_Init(u32 bound) {//GPIO端口设置GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟//USART1_TX GPIOA.9GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9//USART1_RX GPIOA.10初始化GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10 //Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器//USART 初始化设置USART_InitStructure.USART_BaudRate = bound;//串口波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART1, &USART_InitStructure); //初始化串口1USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接受中断USART_Cmd(USART1, ENABLE); //使能串口1 }
串口发送自定义函数封装
-
printf重定向
int fgetc(FILE *f) {while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE)==RESET);return (int)USART_ReceiveData(USART1); } -
串口写字节函数
/** 功能:串口写字节函数* * 参数1:USARTx :串口号* * 参数2:Data :需写入的字节*/ void USART_Send_Byte(USART_TypeDef* USARTx, uint16_t Data) {USART_SendData(USARTx, Data);while(USART_GetFlagStatus(USARTx, USART_FLAG_TXE)==RESET); } -
串口发送字符串函数
/* * 函数名称: Usart_SendString * * 函数功能: 串口数据发送 * * 入口参数: USARTx:串口组 * * str:要发送的数据 * * len:数据长度 */ void Usart_SendString(USART_TypeDef *USARTx, unsigned char *str, unsigned short len) {unsigned short count = 0;for(; count < len; count++){USART_SendData(USARTx, *str++); //发送数据while(USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET); //等待发送完成} } -
串口格式化打印
/* * 函数名称: UsartPrintf * * 函数功能: 格式化打印 * * 入口参数: USARTx:串口组 * fmt:不定长参 */ #include <stdarg.h> void UsartPrintf(USART_TypeDef *USARTx, char *fmt,...) {unsigned char UsartPrintfBuf[296];va_list ap;unsigned char *pStr = UsartPrintfBuf;va_start(ap, fmt);vsnprintf((char *)UsartPrintfBuf, sizeof(UsartPrintfBuf), fmt, ap); //格式化va_end(ap);while(*pStr != 0){USART_SendData(USARTx, *pStr++);while(USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET);} }
中断服务函数(数据接收)
//串口接收变量定义
unsigned char usart1_buffer[128] = {'\0'}; //接收缓存
unsigned char usart1_index = 0; //中断下标索引
unsigned char usart1_flag = 0; //中断标志位//串口中断服务函数
void USART1_IRQHandler(void)
{uint16_t ch; //串口接收字节缓冲if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //串口收到数据{if(usart1_index == 127) //下标溢出{ usart1_index = 0;memset(usart1_buffer,0x00,sizeof(usart1_buffer));}ch = USART_ReceiveData(USART1); //串口接收1个字节usart1_buffer[usart1_index++] = ch; //数据存入接收数组if((usart1_buffer[usart1_index-1] == 0x0A)&&(usart1_buffer[usart1_index-2] == 0x0D)) //判断结束位{Usart_SendString(USART1,usart1_buffer,usart1_index);usart1_index = 0;//执行命令语句 对于复杂执行语句立flag, 在main函数中执行if(strstr((const char *)usart1_buffer,"open") != NULL) //检测到open信号LED1 = 0;if(strstr((const char *)usart1_buffer,"close") != NULL)LED1 = 1;memset(usart1_buffer,0x00,sizeof(usart1_buffer)); //清空数组}USART_ClearFlag(USART1, USART_FLAG_RXNE); //清除中断标志}
}
串口常用函数汇总
初始化函数:
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
串口使能函数:
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
中断配置函数:
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
串口发送函数:
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
串口接收读取函数:
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
获取响应的串口表示位:
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
中断状态位获取:
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);