激光雷达检测负障碍物(附大概 C++ 代码)
检测效果如图,红色是正负的障碍物点:
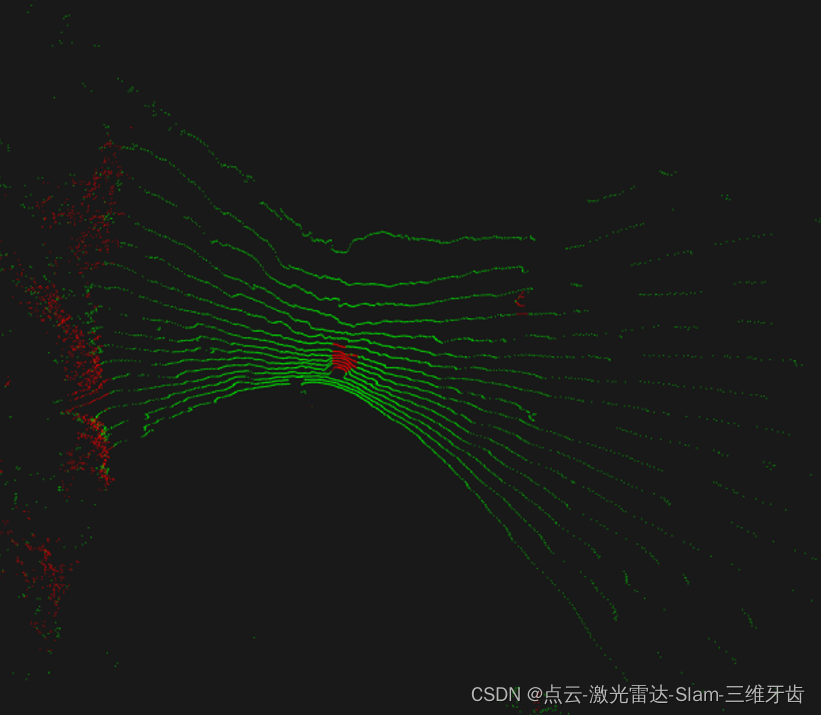
障碍物根据其相对于地面的高度可以分为两类:正向障碍物和负向障碍物。在室外环境中,负障碍物是沟渠、悬崖、洞口或具有陡峭负坡度的地形,可能会造成安全隐患。 不慎通过道路坑洼处时,有颠簸,车辆有很大的损坏甚至掉入坑洼的风险。 因此,负障碍物检测对于自动驾驶感知系统至关重要。
检测使用传统方法,主要根据负障碍物存在的显著局部几何特征。
1 后缘高度下沉
负障碍物明显低于周围的地面,后缘有很多扫描点。 我们可以得出结论,这些扫描点的高度明显小于周围地面的平均高度。
2 在后缘上大的点云密度
单条扫描线得到的扫描点在水平面上呈线性分布。 但由于负障碍物远低于地面,激光扫描仪可以在后缘扫描更多的激光点,导致点云密度较大。
先把点云投影到前视图,一个M*N 的图像结构 fro_map_xydis 上去,用于对比两条激光线束之间的高度和距离变换情况
fro_map_xydis.at<float>(ir, ic) = laser.distance;
理论上来说,前后2根线束的点之间应该是距离差距比较小的,如果差距比较大,可以把该点作为候选点纳入
if (fro_map_xydis.at<float>(ir, ic) - fro_map_xydis.at<float>(ir-1, ic)) > dis_thres
同时,做一个俯视图的点云投影,如果上面的候选点每增加一个,就把俯视图每个小格子的点数量加一
bev_map_jump_num.at<float>(static_cast<int>(cy), static_cast<int>(cx)) += 1;
如果每个小格子的异常高差点数量较多,就会被纳入下一步的分析,如果数量少,就会跳过
if (bev_map_jump_num.at<float>(static_cast<int>(cy), static_cast<int>(cx)) < gConfig.smooth_window_size) {
continue;
}
最后,根据每个可疑障碍物区域的长宽和点数量,做一个最后的过滤,即可得到最后的正负障碍物。