ARM接口编程—IIC总线(exynos 4412平台)
IIC总线简介
-
IIC总线是Philips公司在八十年代初推出的一种串行、半双工总线
主要用于近距离、低速的芯片之间的通信;IIC总线有两根双向的信号线一根数据线SDA用于收发数据,一根时钟线SCL用于通信双方时钟的同步;IIC总线硬件结构简单,成本较低,因此在各个领域得到了广泛的应用 -
IIC总线是一种多主机总线,连接在IIC总线上的器件分为主机和从机主机有权发起和结束一次通信,而从机只能被主机呼叫;当总线上有多个主机同时启用总线时,IIC也具备冲突检测和仲裁的功能来防止错误产生;
每个连接到IIC总线上的器件都有一个唯一的地址(7bit),且每个器件都可以作为主机也可以作为从机(同一时刻只能有一个主机),总线上的器件增加和删除不影响其他器件正常工作;IIC总线在通信时总线上发送数据的器件为发送器,接收数据的器件为接收器;
IIC总线通信过程
- 1.主机发送起始信号启用总线
- 2.主机发送一个字节数据指明从机地址和后续字节的传送方向
- 3.被寻址的从机发送应答信号回应主机
- 4.发送器发送一个字节数据
- 5.接收器发送应答信号回应发送器
- … … (循环步骤4、5)
- n.通信完成后主机发送停止信号释放总线
IIC总线寻址方式
- IIC总线上传送的数据是广义的,既包括地址,又包括真正的数据
- 主机在发送起始信号后必须先发送一个字节的数据,该数据的高7位为从机地址,最低位表示后续字节的传送方向,'0’表示主机发送数据,'1’表示主机接收数据;总线上所有的从机接收到该字节数据后都将这7位地址与自己的地址进行比较,如果相同,则认为自己被主机寻址,然后再根据第8位将自己定为发送器或接收器
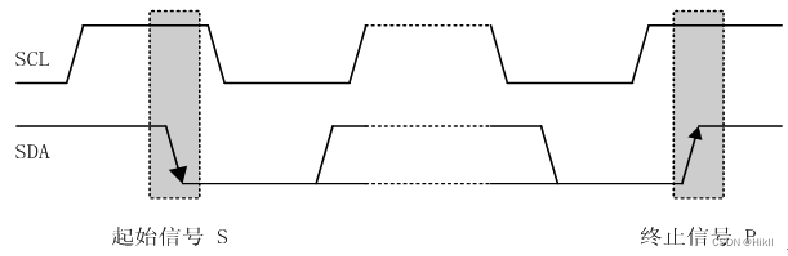
起始信号和停止信号
- SCL为高电平时,SDA由高变低表示起始信号
- SCL为高电平时,SDA由低变高表示停止信号
- 起始信号和停止信号都是由主机发出,起始信号产生后总线处于占用状态
停止信号产生后总线处于空闲状态
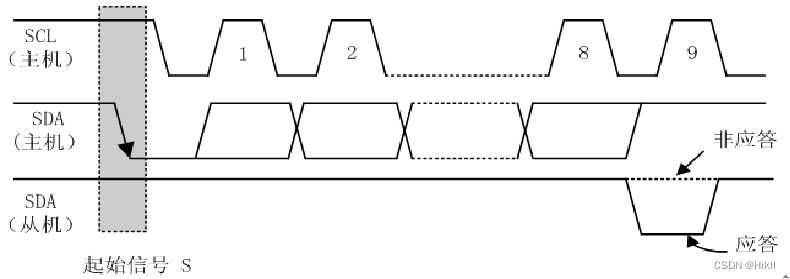
字节传送与应答
IIC总线通信时每个字节为8位长度,数据传送时,先传送最高位,后传送低位,发送器发送完一个字节数据后接收器必须发送1位应答位来回应发送器即一帧共有9位
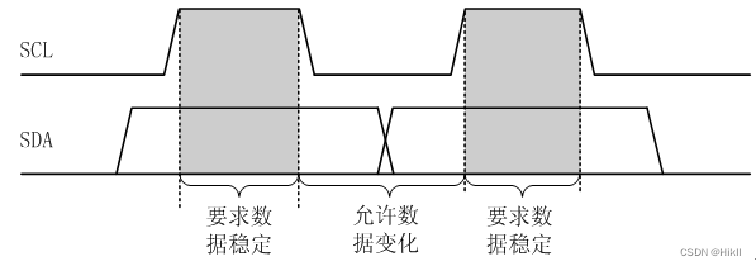
同步信号
IIC总线在进行数据传送时,时钟线SCL为低电平期间发送器向数据线上发送一位数据,在此期间数据线上的信号允许发生变化,时钟线SCL为高电平期间接收器从数据线上读取一位数据,在此期间数据线上的信号不允许发生变化,必须保持稳定
典型IIC时序
-
主机向从机发送数据

-
从机向主机发送数据

-
主机先向从机发送数据,然后从机再向主机发送数据

注:阴影部分表示数据由主机向从机传送,无阴影部分则表示数据由从机向主机传送;A表示应答, A非表示非应答,S表示起始信号,P表示终止信号
代码实现
#include "exynos_4412.h"/****************MPU6050内部寄存器地址****************/#define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)
#define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)
#define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
#define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x18(不自检,2G,5Hz)
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用)
#define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读)
#define SlaveAddress 0x68 //MPU6050-I2C地址void mydelay_ms(int time)
{int i,j;while(time--){for(i=0;i<5;i++)for(j=0;j<514;j++);}
}void iic_write (unsigned char slave_addr, unsigned char addr, unsigned char data)
{/*对时钟源进行512倍预分频 打开IIC中断(每次完成一个字节的收发后中断标志位会自动置位)*/I2C5.I2CCON = I2C5.I2CCON | (1<<6) | (1<<5);/*设置IIC模式为主机发送模式 使能IIC发送和接收*/I2C5.I2CSTAT = 0xd0;/*将第一个字节的数据写入发送寄存器 即从机地址和读写位(MPU6050-I2C地址+写位0)*/I2C5.I2CDS = slave_addr<<1;/*设置IIC模式为主机发送模式 发送起始信号启用总线 使能IIC发送和接收*/I2C5.I2CSTAT = 0xf0;/*等待从机接受完一个字节后产生应答信号(应答后中断挂起位自动置位)*/while(!(I2C5.I2CCON & (1<<4)));/*将要发送的第二个字节数据(即MPU6050内部寄存器的地址)写入发送寄存器*/I2C5.I2CDS = addr;/*清除中断挂起标志位 开始下一个字节的发送*/I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));/*等待从机接受完一个字节后产生应答信号(应答后中断挂起位自动置位)*/while(!(I2C5.I2CCON & (1<<4)));/*将要发送的第三个字节数据(即要写入到MPU6050内部指定的寄存器中的数据)写入发送寄存器*/I2C5.I2CDS = data;/*清除中断挂起标志位 开始下一个字节的发送*/I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));while(!(I2C5.I2CCON & (1<<4)));/*发送停止信号 结束本次通信*/I2C5.I2CSTAT = 0xD0;/*清除中断挂起标志位*/I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));/*延时*/mydelay_ms(10);
}unsigned char iic_read(unsigned char slave_addr, unsigned char addr)
{unsigned char data = 0;/*对时钟源进行512倍预分频 打开IIC中断(每次完成一个字节的收发后中断标志位会自动置位)*/I2C5.I2CCON = I2C5.I2CCON | (1<<6) | (1<<5);/*设置IIC模式为主机发送模式 使能IIC发送和接收*/I2C5.I2CSTAT = 0xd0;/*将第一个字节的数据写入发送寄存器 即从机地址和读写位(MPU6050-I2C地址+写位0)*/I2C5.I2CDS = slave_addr<<1;/*设置IIC模式为主机发送模式 发送起始信号启用总线 使能IIC发送和接收*/I2C5.I2CSTAT = 0xf0;/*等待从机接受完一个字节后产生应答信号(应答后中断挂起位自动置位)*/while(!(I2C5.I2CCON & (1<<4)));/*将要发送的第二个字节数据(即要读取的MPU6050内部寄存器的地址)写入发送寄存器*/I2C5.I2CDS = addr;/*清除中断挂起标志位 开始下一个字节的发送*/I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));/*等待从机接受完一个字节后产生应答信号(应答后中断挂起位自动置位)*/while(!(I2C5.I2CCON & (1<<4)));/*清除中断挂起标志位 重新开始一次通信 改变数据传送方向*/I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));/*将第一个字节的数据写入发送寄存器 即从机地址和读写位(MPU6050-I2C地址+读位1)*/I2C5.I2CDS = slave_addr << 1 | 0x01;/*设置IIC为主机接收模式 发送起始信号 使能IIC收发*/I2C5.I2CSTAT = 0xb0;/*等待从机接收到数据后应答*/while(!(I2C5.I2CCON & (1<<4)));/*禁止主机应答信号(即开启非应答 因为只接收一个字节) 清除中断标志位*/I2C5.I2CCON = I2C5.I2CCON & (~(1<<7))&(~(1<<4));/*等待接收从机发来的数据*/while(!(I2C5.I2CCON & (1<<4)));/*将从机发来的数据读取*/data = I2C5.I2CDS;/*直接发起停止信号结束本次通信*/I2C5.I2CSTAT = 0x90;/*清除中断挂起标志位*/I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));/*延时等待停止信号稳定*/mydelay_ms(10);return data;
} void MPU6050_Init ()
{iic_write(SlaveAddress, PWR_MGMT_1, 0x00); //设置使用内部时钟8Miic_write(SlaveAddress, SMPLRT_DIV, 0x07); //设置陀螺仪采样率iic_write(SlaveAddress, CONFIG, 0x06); //设置数字低通滤波器iic_write(SlaveAddress, GYRO_CONFIG, 0x18); //设置陀螺仪量程+-2000度/siic_write(SlaveAddress, ACCEL_CONFIG, 0x0); //设置加速度量程+-2g
}int main(void)
{unsigned char zvalue_h,zvalue_l; //存储读取结果short int zvalue;/*设置GPB_2引脚和GPB_3引脚功能为I2C传输引脚*/GPB.CON = (GPB.CON & ~(0xF<<12)) | 0x3<<12; //设置GPB_3引脚功能为I2C_5_SCLGPB.CON = (GPB.CON & ~(0xF<<8)) | 0x3<<8; //设置GPB_2引脚功能为I2C_5_SDAuart_init(); //初始化串口MPU6050_Init(); //初始化MPU6050printf("\n********** I2C test!! ***********\n");while(1){zvalue_h = iic_read(SlaveAddress, GYRO_ZOUT_H); //获取MPU6050-Z轴角速度高字节zvalue_l = iic_read(SlaveAddress, GYRO_ZOUT_L); //获取MPU6050-Z轴角速度低字节zvalue = (zvalue_h<<8)|zvalue_l; //获取MPU6050-Z轴角速度printf(" GYRO--Z :Hex: %d \n", zvalue); //打印MPU6050-Z轴角速度mydelay_ms(100);}return 0;
}