新型人工智能技术让机器人的识别能力大幅提升
原创 | 文 BFT机器人

在德克萨斯大学达拉斯分校的智能机器人和视觉实验室里,一个机器人在桌子上移动一包黄油玩具。通过达拉斯分校计算机科学家团队开发的新系统,机器人每推动一次,就能学会识别物体。
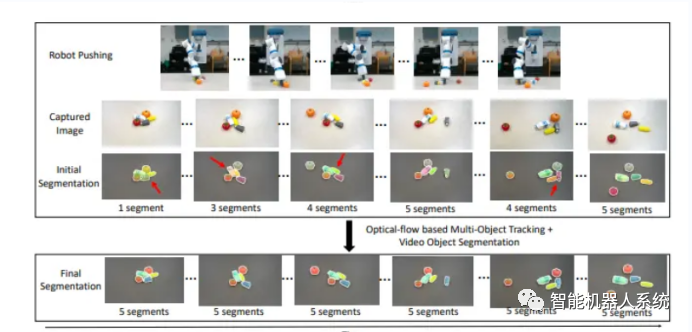
新系统允许机器人多次推动物体,直到收集到一系列图像,进而使系统能够分割序列中的所有物体,直到机器人识别出这些物体。以前的方法都是依靠机器人的一次推动或抓取来 "学习 "物体。
该团队在7月10日至14日于美国加利福尼亚州圣克拉拉市举行的机器人:科学与系统会议上发表了研究论文。会议论文的评选标准是论文的新颖性、技术质量、重要性、潜在影响和清晰度。
机器人能做饭、收拾餐桌和清空洗碗机的日子还很遥远。但该研究小组的机器人系统取得了重大进展,它利用人工智能帮助机器人更好地识别和记忆物体,论文的资深作者于翔博士说。
Erik Jonsson工程与计算机科学学院计算机科学助理教授项博士说:"如果你要求机器人拿起杯子或给你拿一瓶水,机器人就需要识别这些物体。”
UTD研究人员的技术旨在帮助机器人检测家庭等环境中的各种物体,并归纳或识别类似的常见物品,如不同品牌、形状或大小的水瓶。
在Xiang的实验室里有一个储物箱,里面装满了常见食品的玩具包装,如意大利面条、番茄酱和胡萝卜等,用来训练名为Ramp的实验室机器人。Ramp是一个Fetch Robotics移动机械手机器人,站在一个圆形的移动平台上,大约有4英尺高。Ramp有一个长长的机械臂,上面有七个关节。末端是一只方形的 "手",有两个手指,可以抓取物体。
Xiang说,机器人学习识别物品的方式与儿童学习与玩具互动的方式类似。推动物体后,机器人就学会了识别物体。有了这些数据,我们就可以训练人工智能模型,这样机器人下次再看到这个物体时,就不需要再推它了。到第二次看到这个物体时,它就会直接把它捡起来。
研究人员的方法新颖之处在于,机器人会对每个物品推15到20次,而以前的交互式感知方法只使用一次推力。Xiang说,多次推动可以让机器人用包含深度传感器的RGB-D摄像头拍摄更多照片,从而更详细地了解每件物品。这就减少了出错的可能性。
研究人员表示,这种长时间机器人交互进行物体识别的系统,可以显著提高机器人识别日常生活中各类物品的能力。这对机器人完成家务等复杂任务,提升其视觉和认知能力大有裨益。
后续研究将继续提升机器人的其他功能,如运动规划和控制,以实现更复杂的任务,例如分类回收物品等。这项技术进步有望加速机器人进入日常生活,服务人类需求。
作者 | Tina
排版 | 春花
审核 | 柒柒
若您对该文章内容有任何疑问,请与我们联系,将及时回应。想要了解更多资讯,请关注BFT智能机器人系统~