VMware虚拟机+Centos7 配置静态,动态IP
本章目录
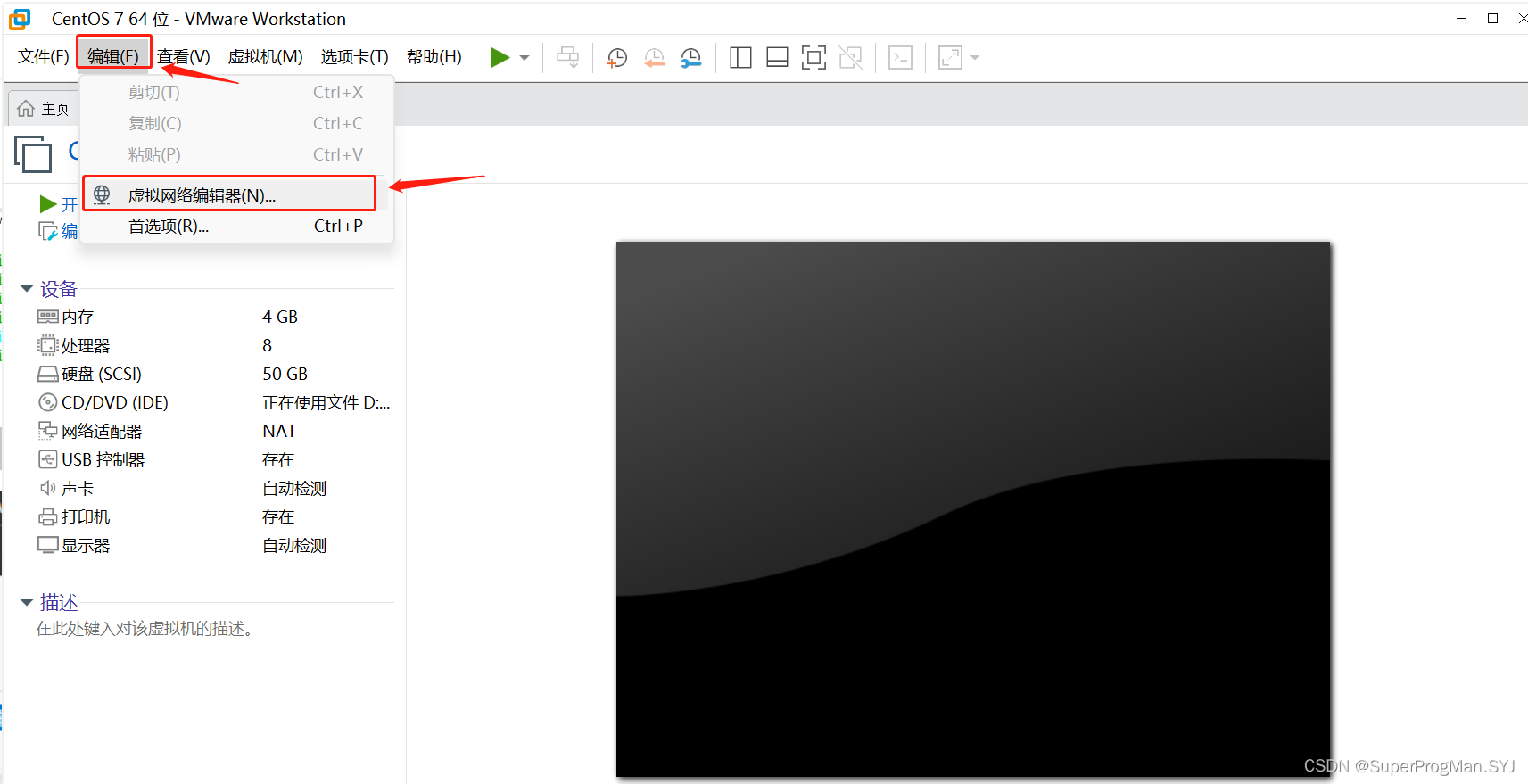
- 一、查看网关: 编辑–>虚拟网络编辑器
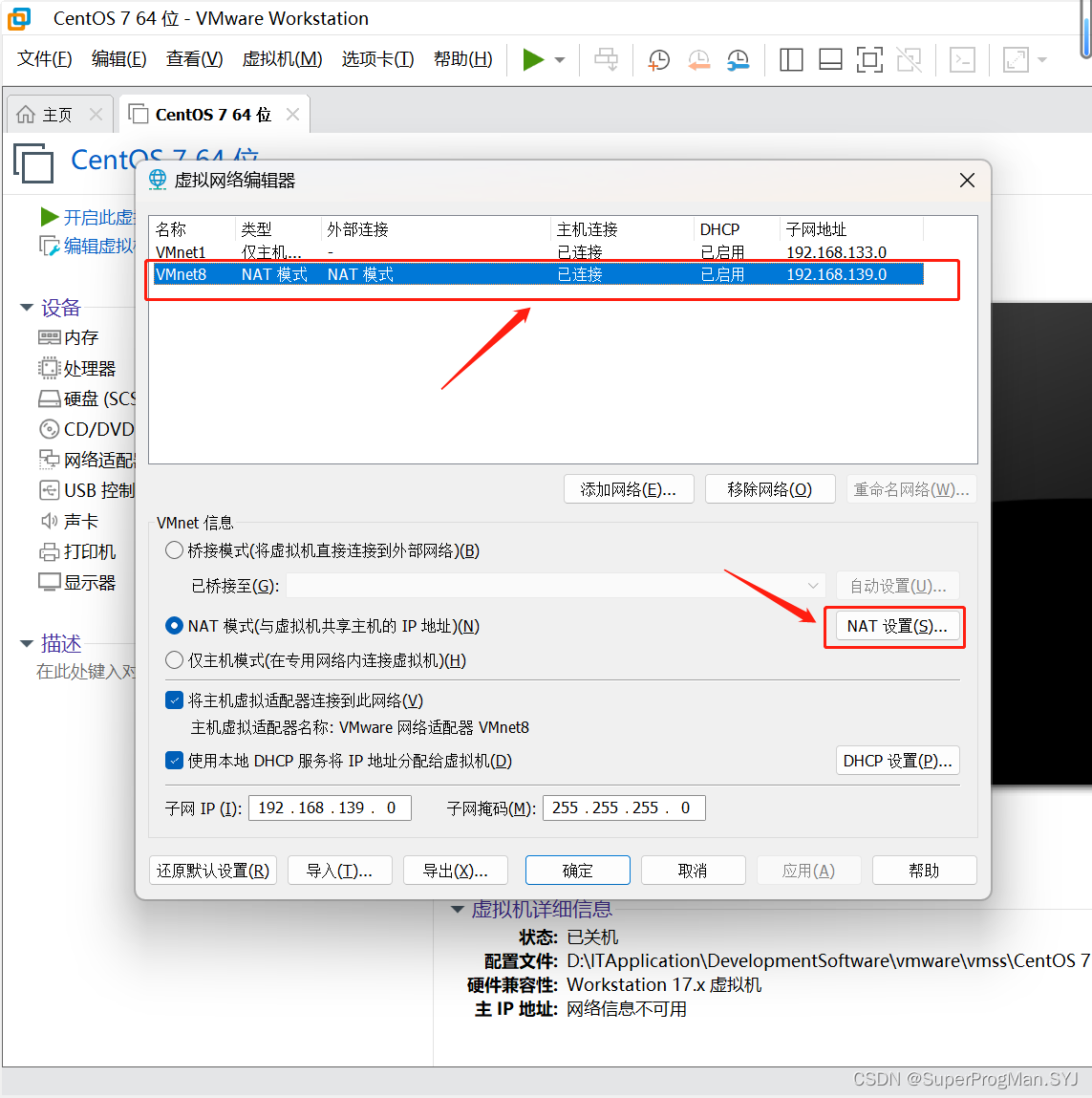
- 二、点击NAT设置
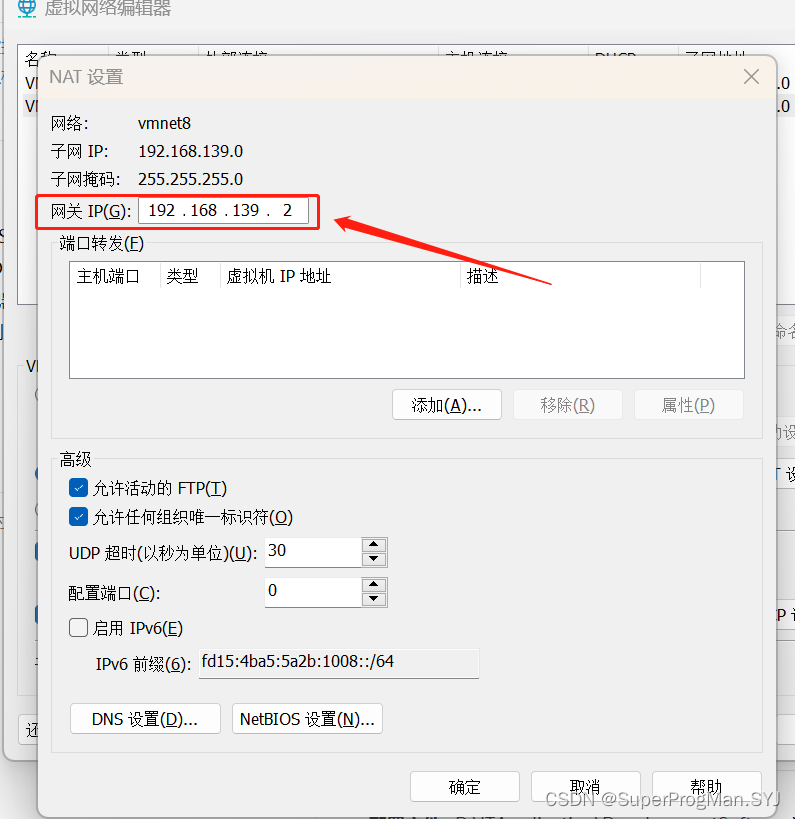
- 三、记住网关IP待会要用
- 四、配置静态ip地址
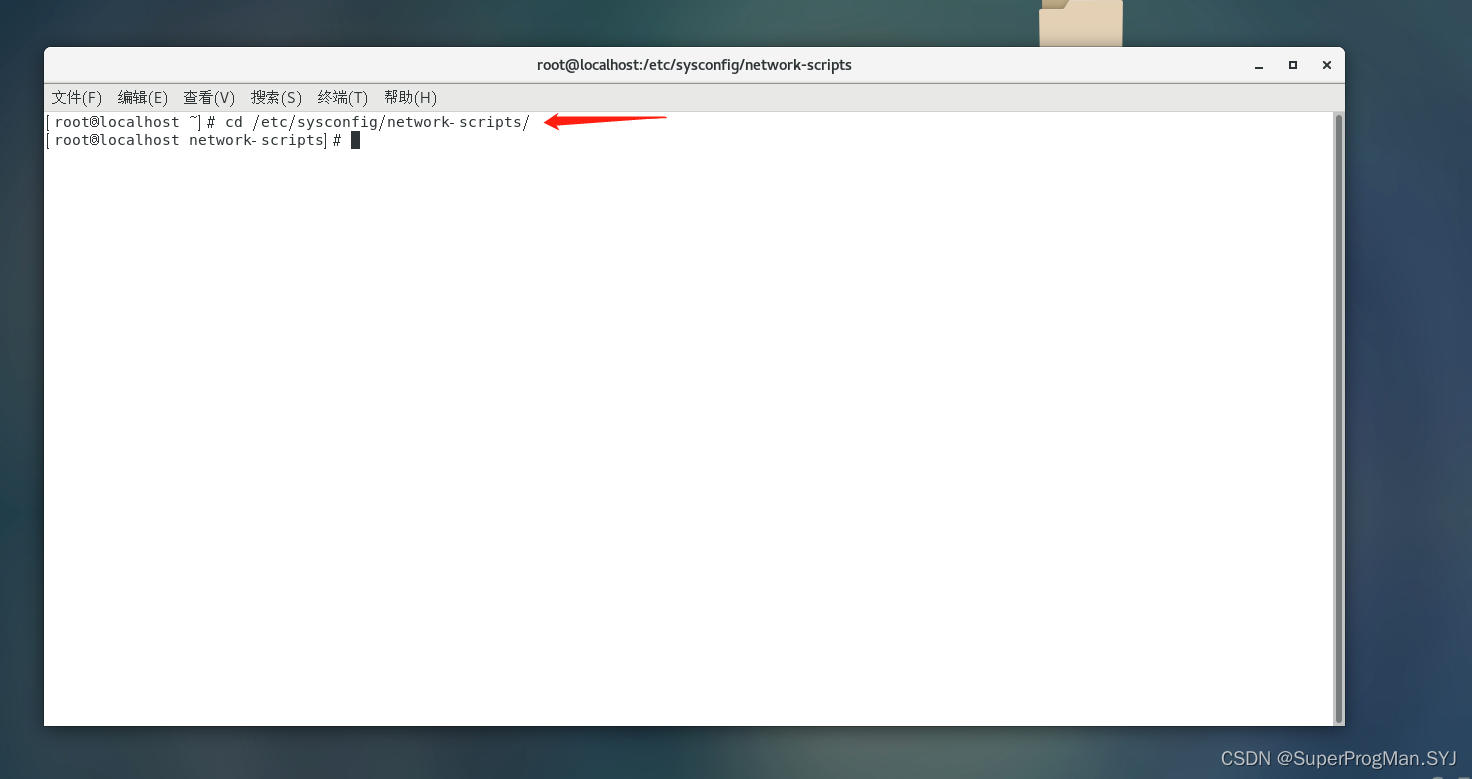
- 1、进入存放修改IP地址的目录
- 2、修改ip地址的文件
- 3、编辑文件
- 4、文件(编辑好后退出)
- 五、重启网络
- 六、测试
- 1、linux上查看IP地址的命令
- 2、在Windows上ping,打开cmd
一、查看网关: 编辑–>虚拟网络编辑器
二、点击NAT设置
三、记住网关IP待会要用
四、配置静态ip地址
1、进入存放修改IP地址的目录
cd /etc/sysconfig/network-scripts/
2、修改ip地址的文件
ls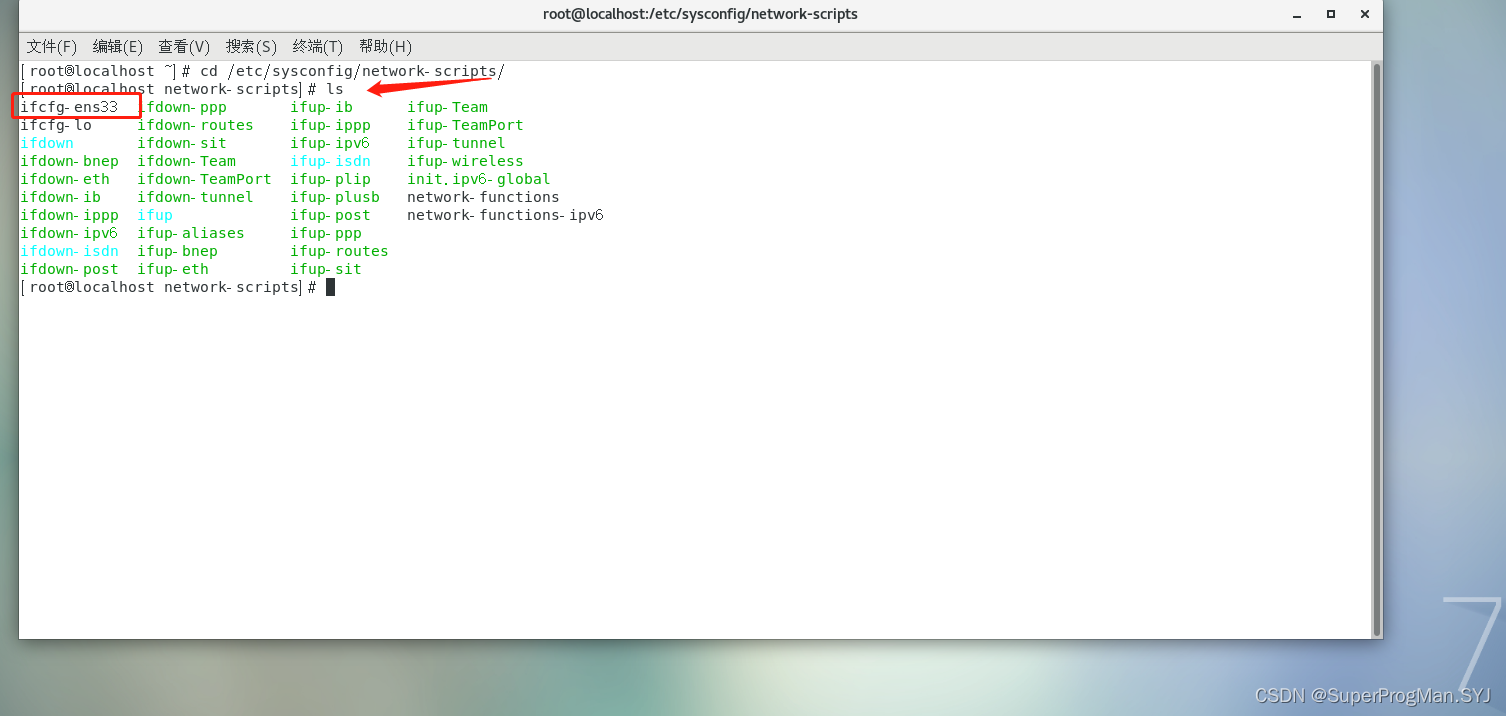
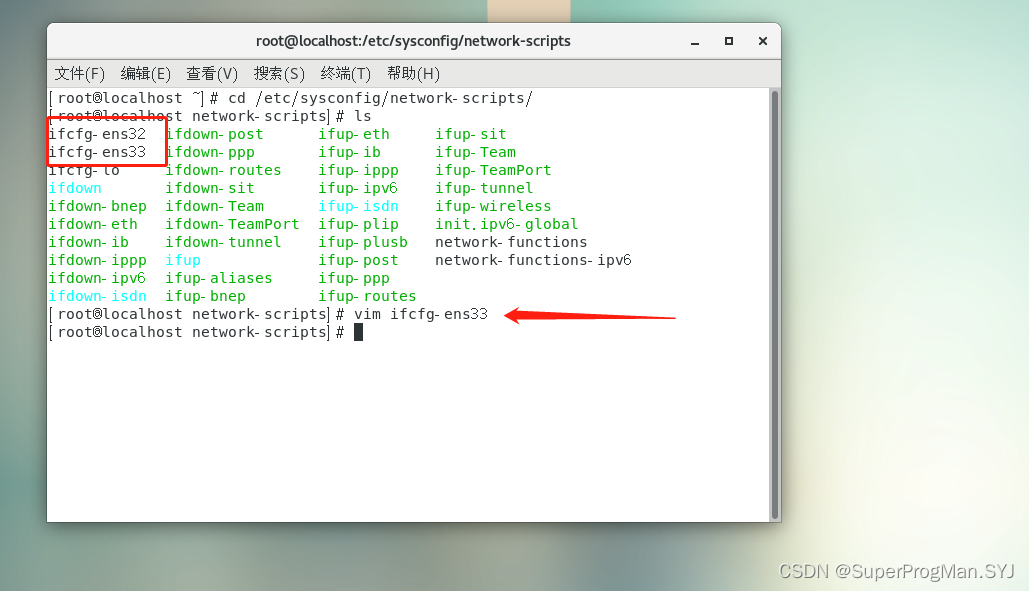
3、编辑文件
vim ifcfg-ens32 或 vim ifcfg-ens33
4、文件(编辑好后退出)
修改BOOTPROTO=static
i编辑
esc关闭
:wq保存
如图:
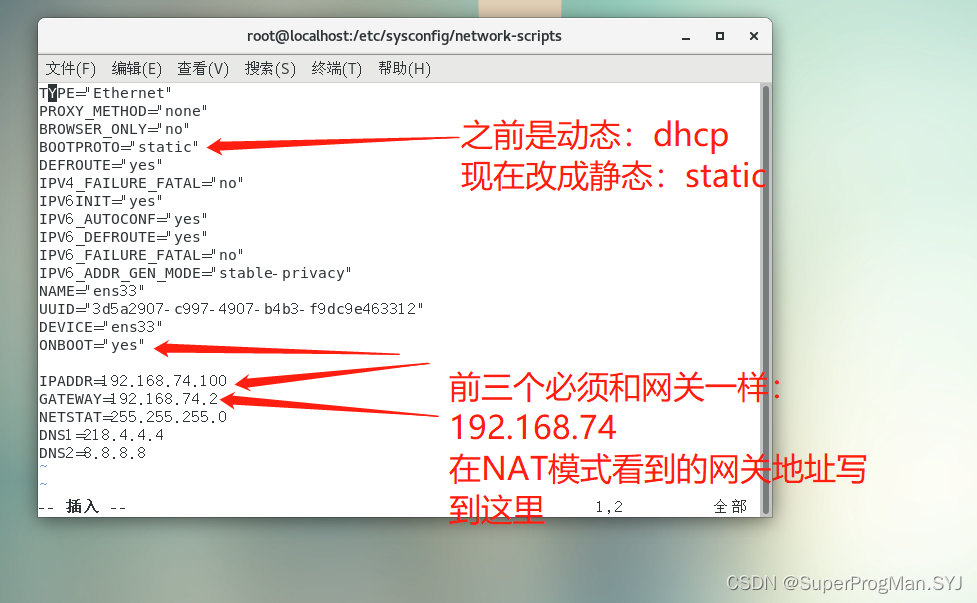
添加以下内容:IP地址、子网掩码、网关、dns服务器
TYPE="Ethernet"
PROXY_METHOD="none"
BROWSER_ONLY="no"
BOOTPROTO="static"
DEFROUTE="yes"
IPV4_FAILURE_FATAL="no"
IPV6INIT="yes"
IPV6_AUTOCONF="yes"
IPV6_DEFROUTE="yes"
IPV6_FAILURE_FATAL="no"
IPV6_ADDR_GEN_MODE="stable-privacy"
NAME="ens33"
UUID="3d5a2907-c997-4907-b4b3-f9dc9e463312"
DEVICE="ens33"
ONBOOT="yes"IPADDR=192.168.74.100
GATEWAY=192.168.74.2
NETSTAT=255.255.255.0
DNS1=218.4.4.4
DNS2=8.8.8.8
五、重启网络
systemctl restart network

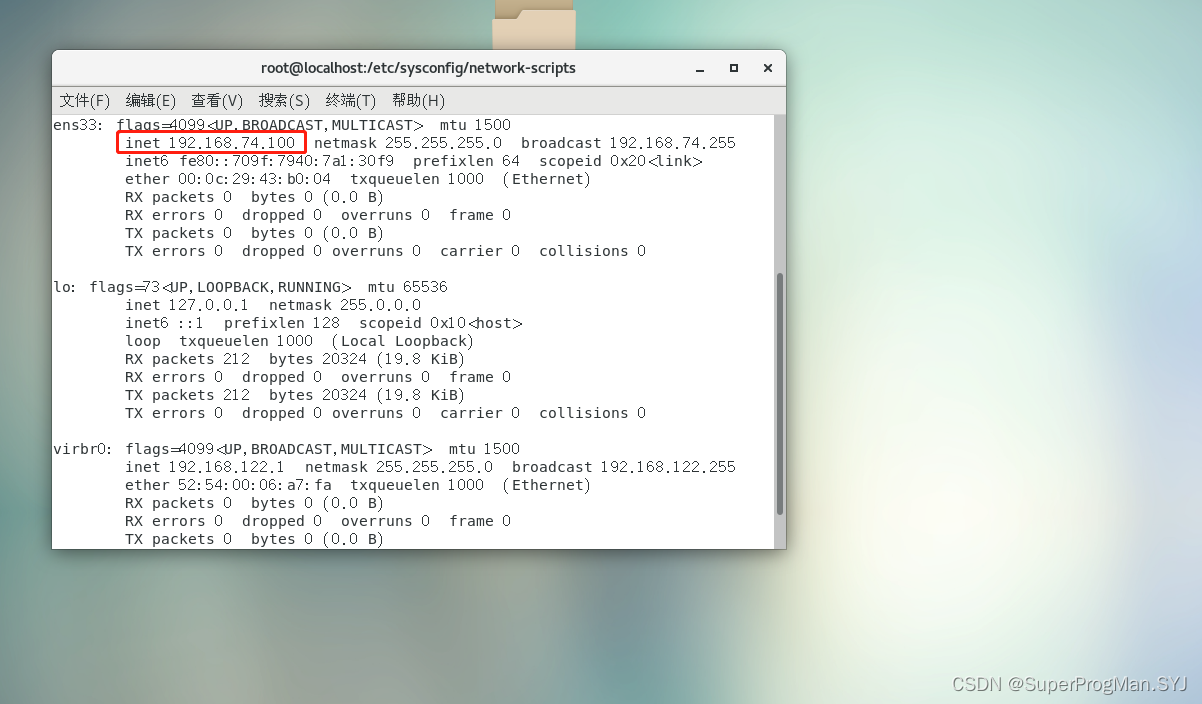
六、测试
1、linux上查看IP地址的命令
ifconfig
2、在Windows上ping,打开cmd
ping 虚拟机地址192.168.74:100
