[ROS]虚拟机ubuntu18.04系统里面运行usb_cam
首先安装usb_cam
sudo apt-get install ros-melodic-usb-cam
运行:
roscore
roslaunch usb_cam usb_cam-test.launch
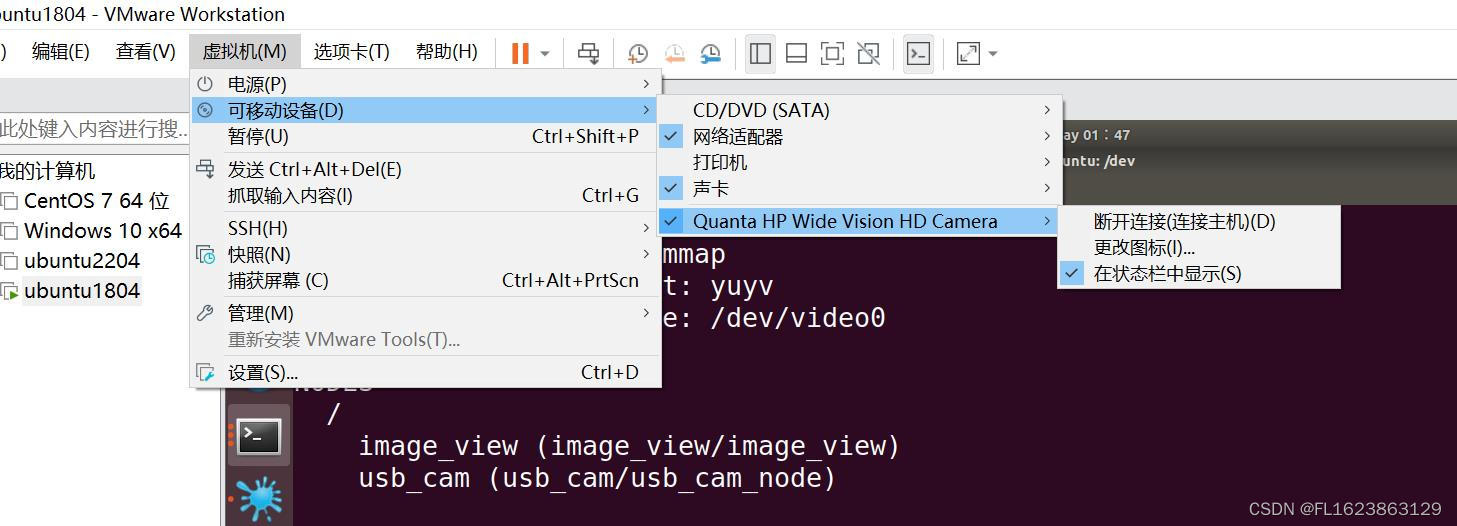
如果一运行报错,首先确认是否存在/dev/video0
可以使用ls /dev/video*查看,如果没有就是没有连接摄像头,设置如下:
如果上面都操作还是报错运行不起来,还需要设置一下下面
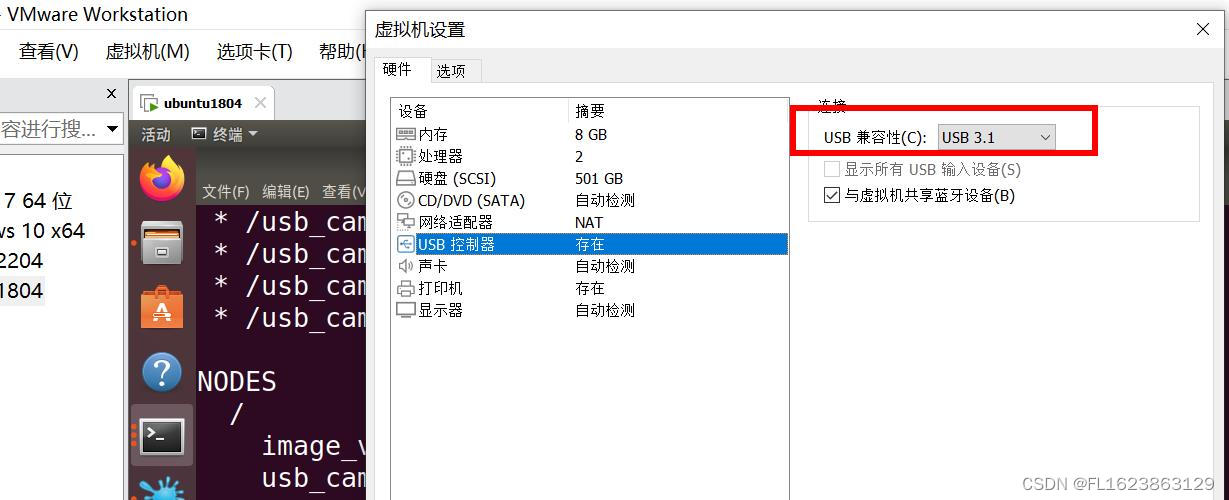
兼容性选usb3.1
如果你不是用的笔记本自带的摄像头,可以编辑配置文件里面修改
cd /opt/ros/melodic/share/usb_cam/launch
sudo gedit usb_cam-test.launch