FreeRTOS中断与任务之间同步(Error:..\..\FreeRTOS\portable\RVDS\ARM_CM4F\port.c,422 )
前言:
FreeRTOS中,中断需要注意几点:
何时使用中断;中断服务函数(ISR)要处理的数据量有多大,通常我们希望中断的切换越快越好,也就是说,ISR尽量采用耗时较少的处理方式;那该如何操作呢?
一、延迟中断概念
所以为了中断服务函数应该尽量断,因此这里才用中断的前部和中断的后部来处理;
前部:负责处理不耗时的操作,比如任务的同步,发送信号量去通知任务;
后部:负责处理耗时的操作,这时候,中断已经恢复现场,实际执行可以视为软中断,即在一个Task任务中执行;
上述的方式也可以称之为延迟中断处理
思路是:
1)首先创建一个二值信号量去同步任务
2)进入中断发送信号量,让任务解除阻塞,这样在中断服务函数运行完就可以立即执行同步任务。
原理:
1)中断处理可以说是被推迟(deferred)到一个处理(handler)任务中;
2)如果某个中断处理要求特别紧急,其延迟处理任务的优先级可以设为最高,以保证延迟处理任务随时都抢占系统中的其它任务。
3)延迟处理任务就成为其对应的 ISR退出后第一个执行的任务,在时间上紧接着 ISR 执行,相当于所有的处理都在 ISR 中完成一样。
二、中断安全的API
通常需要在中断服务函数(ISR)中调用FreeRTOS的API函数,但许多的API在ISR中是不安全的,其中一些API会将调用的任务转换到阻塞态,如果在ISR中调用了这类API则会出现很多问题。FreeRTOS通过提供两个版本的API来解决这个问题,一个版本供任务调用,一个版本供ISR调用,用于ISR版本的API其函数名都带有"FromISR"后缀。
1)那么我同步的信号量的函数为:
xSemaphoreGiveFromISR( PHY_RX_xSemaphore, &xHigherPriorityTaskWoken);
PHY_RX_xSemaphore:定义的二值信号量
2)在中断内不会自动切换到高优先级的任务,需要应用程序设置变量以通知调度器执行上下文切换。中断安全版的API(以“FromISR”结尾的函数) 具有一个名为pxHigherPriorityTaskWoken的指针如果应该执行上下文切换,则中断安全版API函数将(*pxHigherPriorityTaskWoken)设置为pdTRUE,因此,pxHigherPriorityTaskWoken指向的变量必须在第一次使用前初始化为pdFALSE。
初始化:BaseType_t xHigherPriorityTaskWoken = pdFALSE;
API函数只能将(*pxHigherPriorityTaskWoken)设置为pdTRUE,如果ISR调用多个API函数,则可以给每个API传入一个pxHigherPriorityTaskWoken指向的变量,但必须在第一次使用前初始化为pdFALSE。
pxHigherPriorityTaskWoken参数是可选的。如果不需要,将pxHigherPriorityTaskWoken设置为NULL即可。
3)请求上下文切换的宏
taskYIELD() 是一个可以在任务中调用以请求上下文切换的宏。
portYIELD_FROM_ISR() 和portEND_SWITCHING_ISR() 以相同的方式使用,并执行相同的操作。 一些FreeRTOS移植仅提供两个宏中的一个。 较新的FreeRTOS移植提供两种宏。 本文将使用portYIELD_FROM_ISR()宏。
那么这个宏的作用就是:portYIELD_FROM_ISR()来执行上下文的切换,前提得根据xHigherPriorityTaskWoken;当xHigherPriorityTaskWoken为pdFALSE,
调用portYIELD_FROM_ISR()将不会发生上下文切换,否则就会发生上下文切换
三、实际应用
下面是我以太网中断应用:
void ETH_IRQHandler(void)//以太网中断
{
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
xSemaphoreGiveFromISR( PHY_RX_xSemaphore, &xHigherPriorityTaskWoken);
ETH_DMAClearITPendingBit(ETH_DMA_INT_R);
ETH_DMAClearITPendingBit(ETH_DMA_INT_NIS);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}/* 定义一个信号量用于PHY接受数据同步 */
SemaphoreHandle_t PHY_RX_xSemaphore;
void NETWORK_Task(void *pvParameters)
{
for(;;)
{
if(xSemaphoreTake(PHY_RX_xSemaphore,portMAX_DELAY) == pdTRUE)
{
//执行函数
}
}
}
注:如果在系统中断中要使用FreeRTOS的API函数,然后不带“FromISR”结尾的函数则会串口打印信息回出现
Error:..\..\FreeRTOS\portable\RVDS\ARM_CM4F\port.c,422
![]()
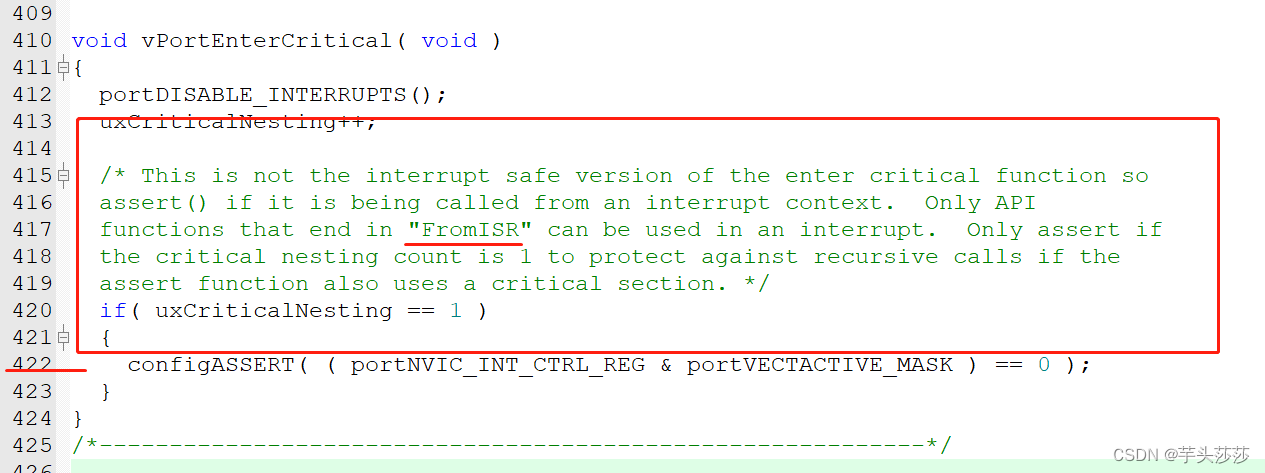
所以一定要使用API(以“FromISR”结尾的函数