四旋翼飞行器基本模型(MatlabSimulink)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码、Simulink、文章

💥1 概述
四轴飞行器模型与控制系统开发用MATLABSimulink实现
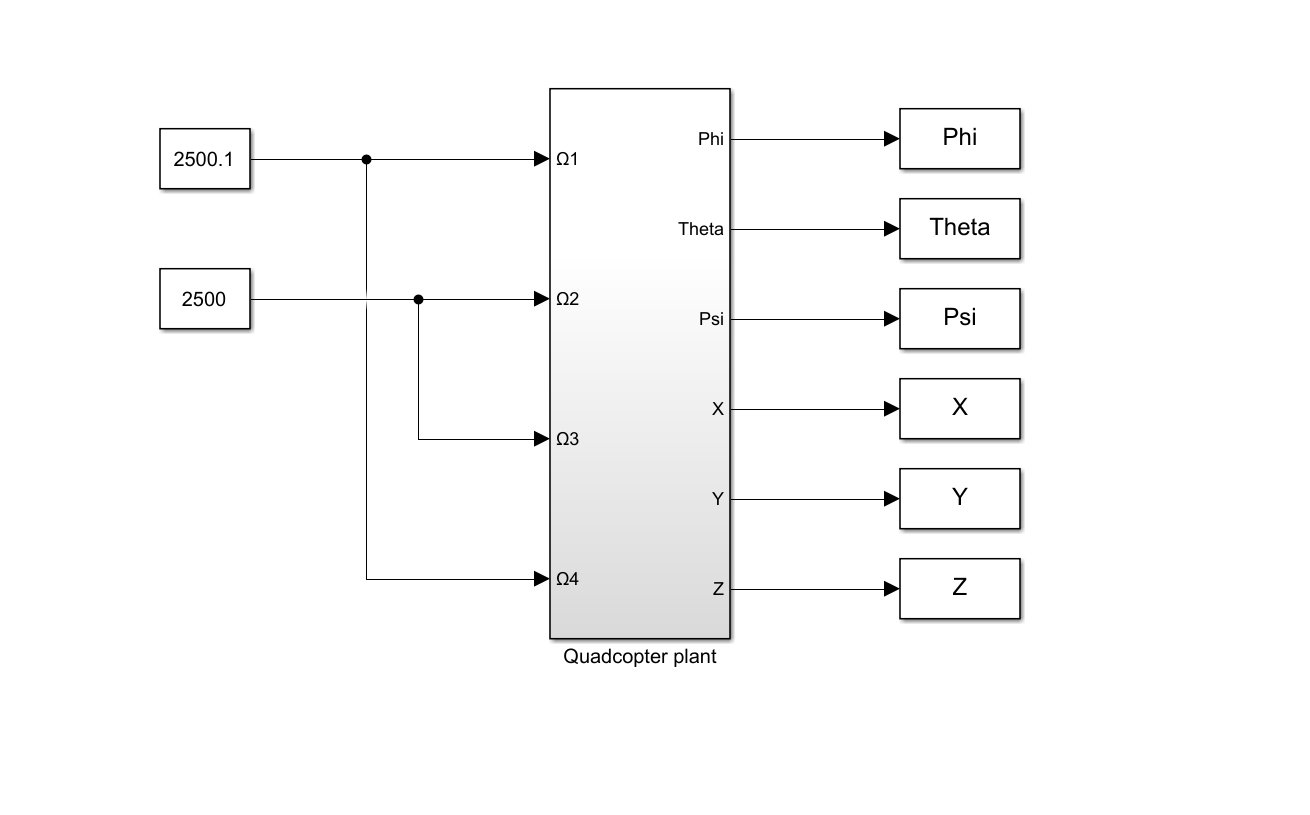
现在已经生成了基本的运动方程,可以形成Simulink植物模型了。此部分的MATLAB脚本和Simulink模型可以在名为“Basic_Simulink_Model”的文件夹中找到。首先,需要创建一个定义惯性矩、转子惯性、长度、质量、推力和阻力系数的基本脚本。然后创建Simulink模型。从一个空的Simulink块图开始,首先定义求解器选项。在Simulink的顶部工具栏上,点击Simulation,然后选择Model Configuration Parameters。在求解器选项下,确保类型为可变步长,求解器设置为自动。现在可以定义一个名为“四旋翼植物”的子系统。该子系统有4个输入(Ω1,Ω2,Ω3,Ω4)和6个输出(X,Y,Z,滚动,俯仰,偏航)。此时,模型应该看起来像下面的图2.17和2.18。
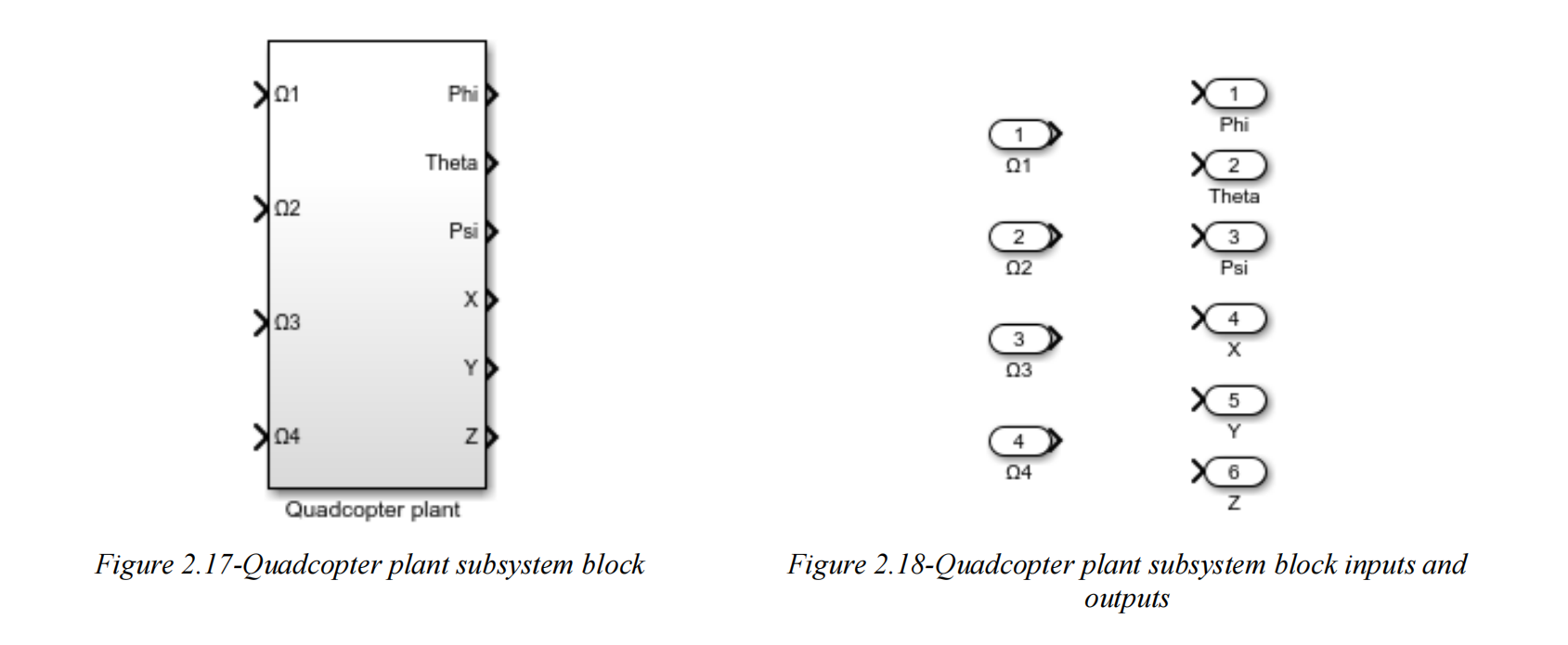
详细讲解见第4部分。
📚2 运行结果


部分代码:
Jr = 6.5*10^(-7); % Total rotational moment of inertia around the propeller axis 6.5*10^(-6)
b = 1.144e-08; % Thrust factor
d = 9.94e-10; % Drag factor 1.0876e-9
l = 0.1; % Distance to the center of the Quadrotor
g = 9.81; % Gravitational acceleration
weight =.284; %kg Weight=mg (from a scale)
m = weight/g; % Mass of the Quadrotor in Kg
TF=30; %Simulation time
sim('Simple_Quadcopter_Model_Sim_X_Yaw');
figure(fig)
fig=fig+1;
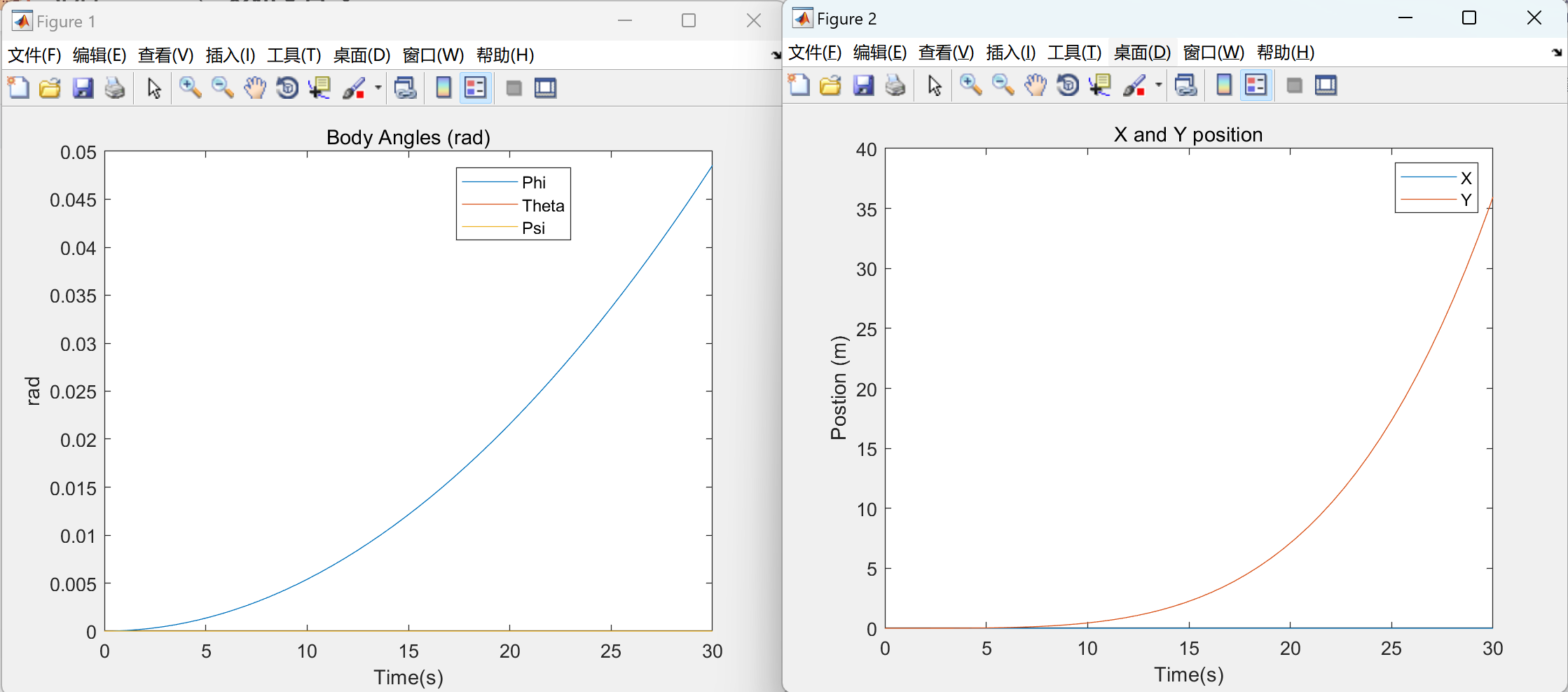
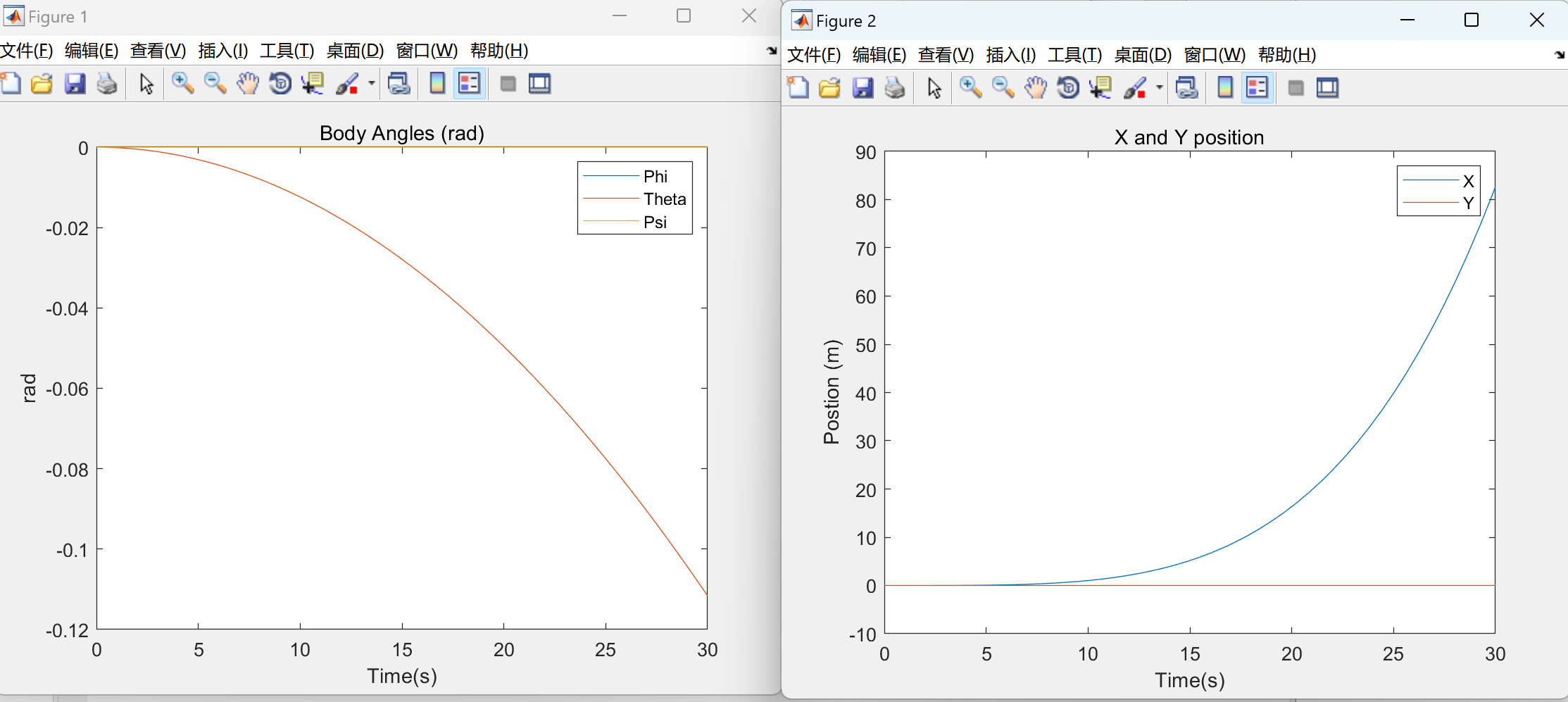
plot(time,Phi,time,Theta,time,Psi)
title('Body Angles (rad)')
xlabel('Time(s)')
ylabel('rad')
legend('Phi','Theta','Psi')
figure(fig)
fig=fig+1;
plot(time,X,time,Y)
title('X and Y position')
xlabel('Time(s)')
ylabel('Postion (m)')
legend('X', 'Y')
figure(fig)
fig=fig+1;
plot(time,Z)
title('Altitude')
xlabel('Time(s)')
ylabel('Altitude (m)')
X_m1=(((pi/4)*l)+X);
Y_m1=-(((pi/4)*l)+Y);
X_m2=(((pi/4)*l)+X);
Y_m2=(((pi/4)*l)+Y);
X_m3=-(((pi/4)*l)+X);
Y_m3=(((pi/4)*l)+Y);
X_m4=-(((pi/4)*l)+X);
Y_m4=-(((pi/4)*l)+Y);
X1 = X_m1.*cos(Psi) - Y_m1.*sin(Psi);
Y1 = X_m1.*sin(Psi) + Y_m1.*cos(Psi);
X2 = X_m2.*cos(Psi) - Y_m2.*sin(Psi);
Y2 = X_m2.*sin(Psi) + Y_m2.*cos(Psi);
X3 = X_m3.*cos(Psi) - Y_m3.*sin(Psi);
Y3 = X_m3.*sin(Psi) + Y_m3.*cos(Psi);
X4 = X_m4.*cos(Psi) - Y_m4.*sin(Psi);
Y4 = X_m4.*sin(Psi) + Y_m4.*cos(Psi);
figure(fig)
fig=fig+1;
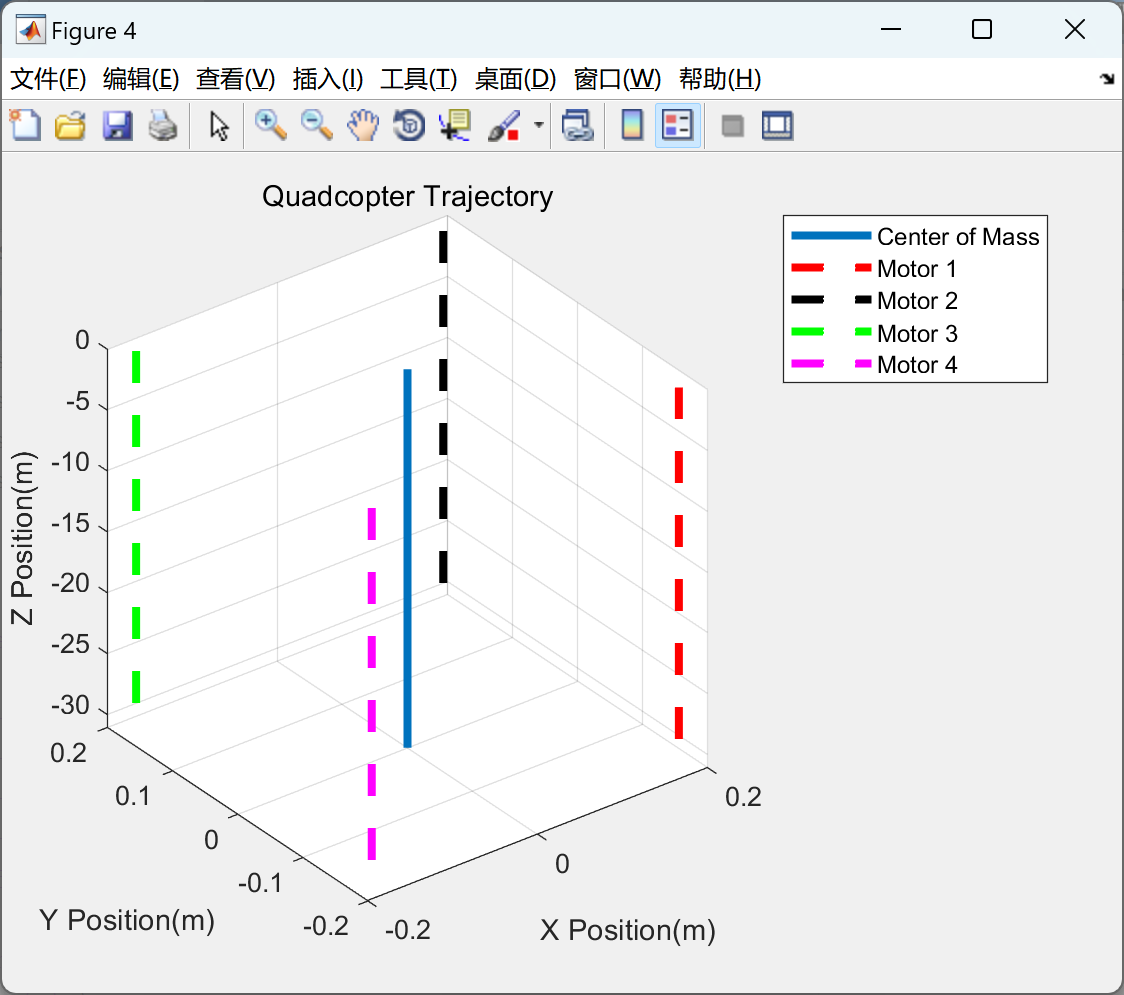
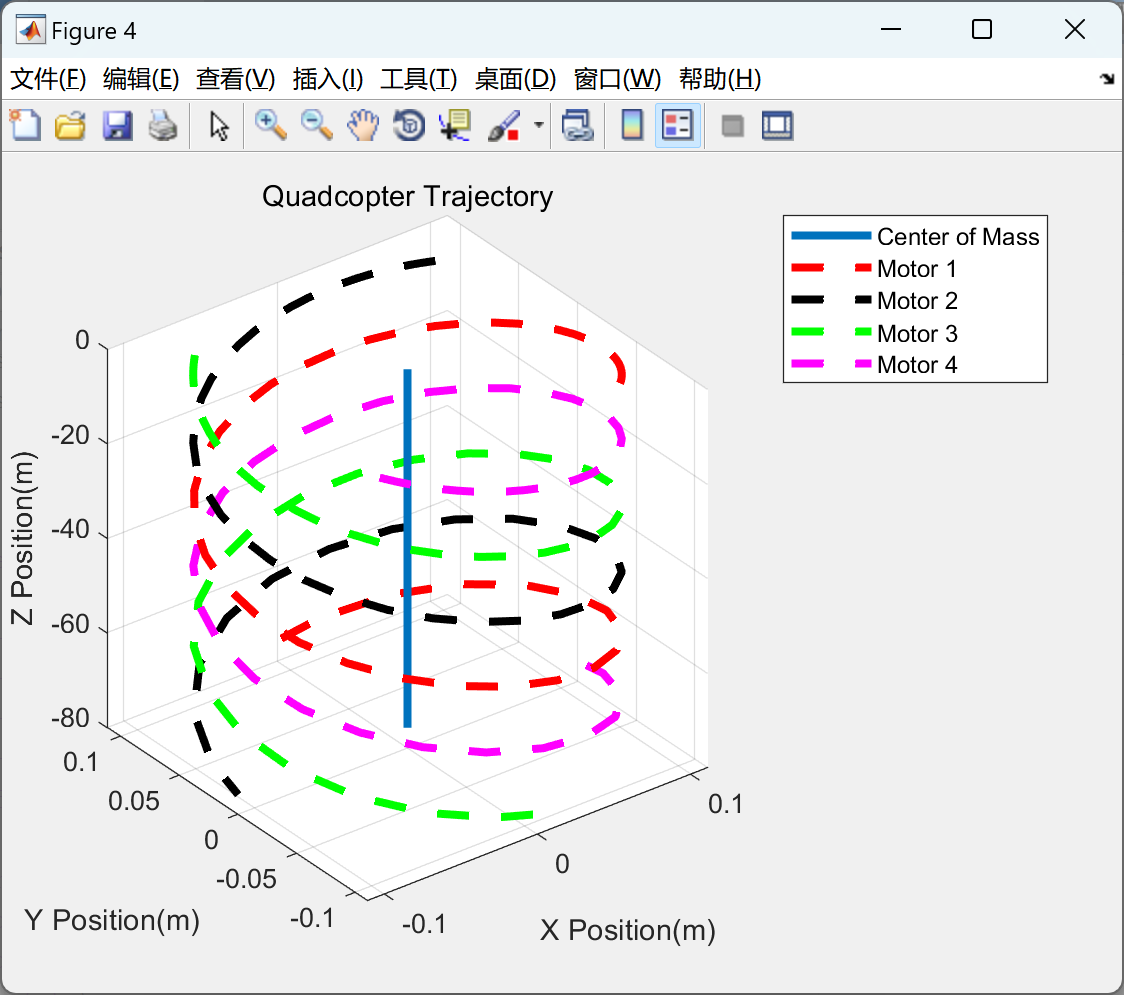
plot3(X,Y,Z,'lineWidth',3)
hold on
plot3(X1,Y1,Z,'--r','lineWidth',3)
plot3(X2,Y2,Z,'--k','lineWidth',3)
plot3(X3,Y3,Z,'--g','lineWidth',3)
plot3(X4,Y4,Z,'--m','lineWidth',3)
legend('Center of Mass','Motor 1','Motor 2','Motor 3','Motor 4')
grid on
title('Quadcopter Trajectory')
xlabel('X Position(m)')
ylabel('Y Position(m)')
zlabel('Z Position(m)')
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。