三相PMSM的坐标变换
三相PMSM的坐标变换
三相PMSM的数学模型具有复杂性和耦合性的多变量系统。因此需要对其进行降阶和解耦变换。
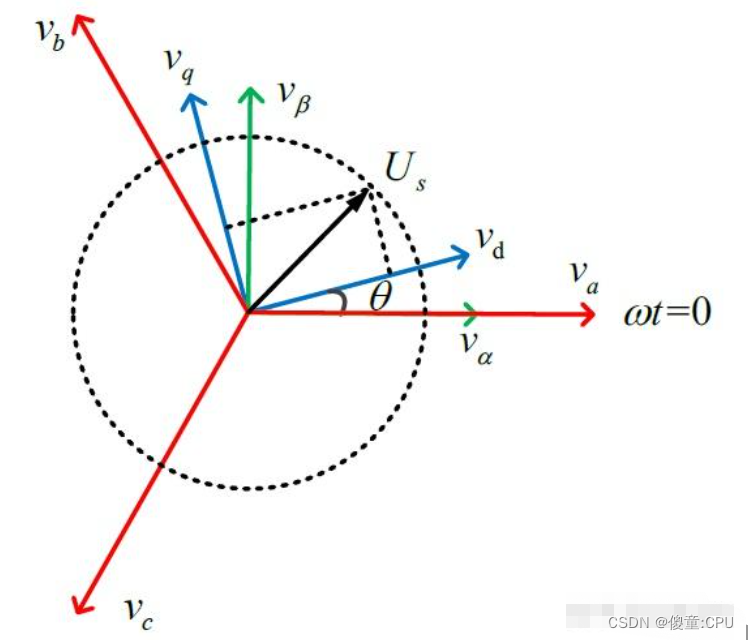
Vα,Vb,Vc是自然坐标系。
Vα,Vβ是静止坐标系。
Vd,Vq是同步旋转坐标系。
自然坐标系
三相永磁同步电机的驱动电路如下图所示:

三相逆变输出的三相电压为UA,UB,UC,在三相平面静止坐标系ABC中,电压方程满足以下公式:
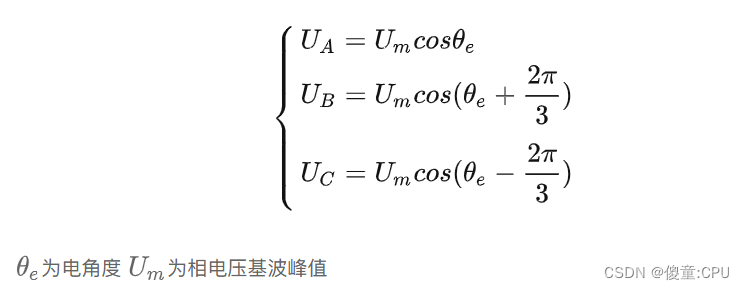
三相电压的大小是随时间变化的正弦波形,相位依次相差120°
通入的电压/电流在这三轴坐标系中变化:

三个矢量相加合并在一起:

静止坐标系
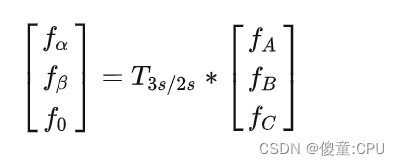
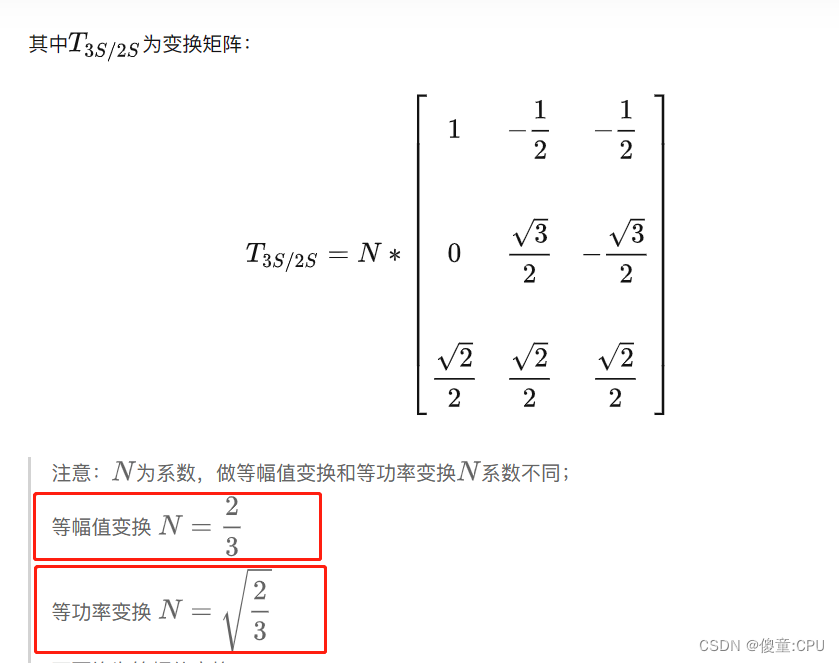
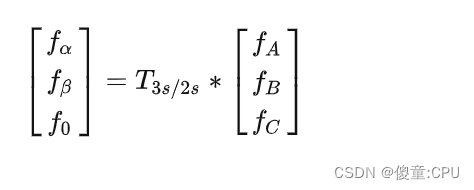
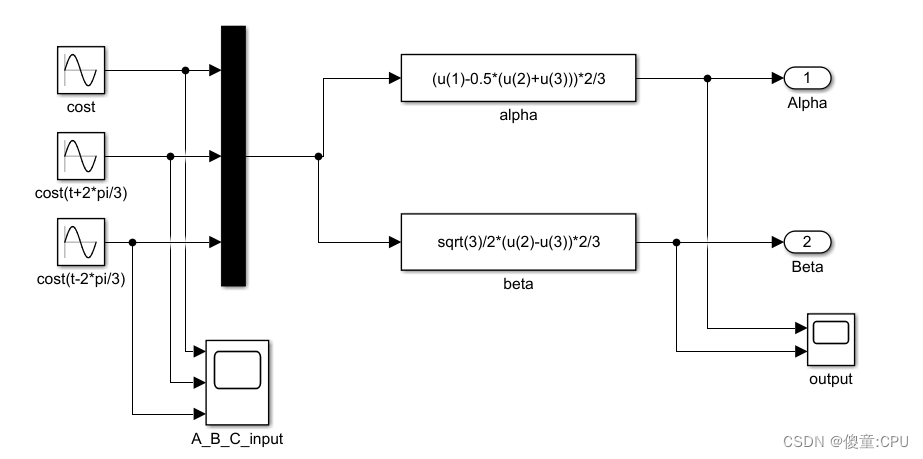
由自然坐标系变换到静止坐标系的坐标变换称之为Clark变换。
变换公式如下:
通入的电压/电流在这二轴坐标系中变化:

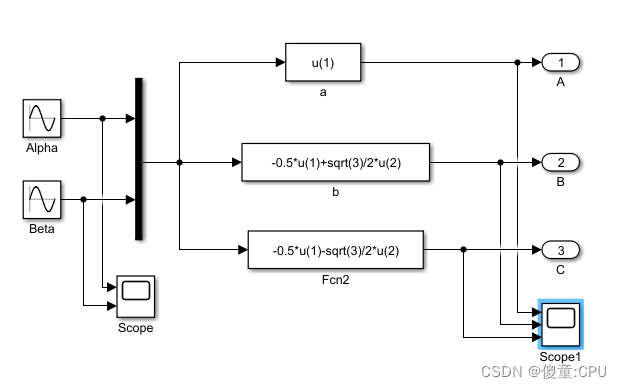
从静止坐标系转换到自然坐标系的坐标变换称为反Clark变换。
变换公式如下:
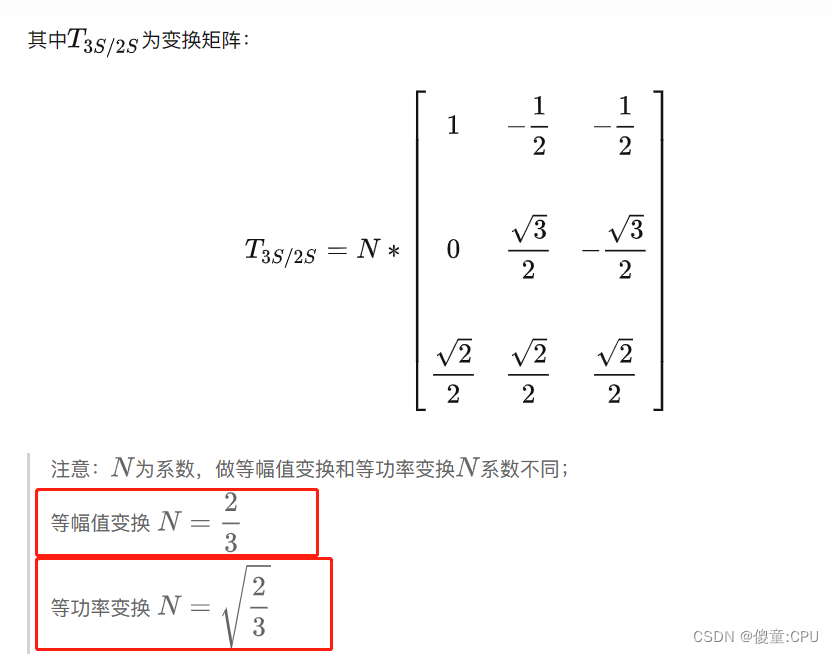
对于三相对称系统而言,在计算静止坐标系下的变量时,零序分量f0可以忽略不计。
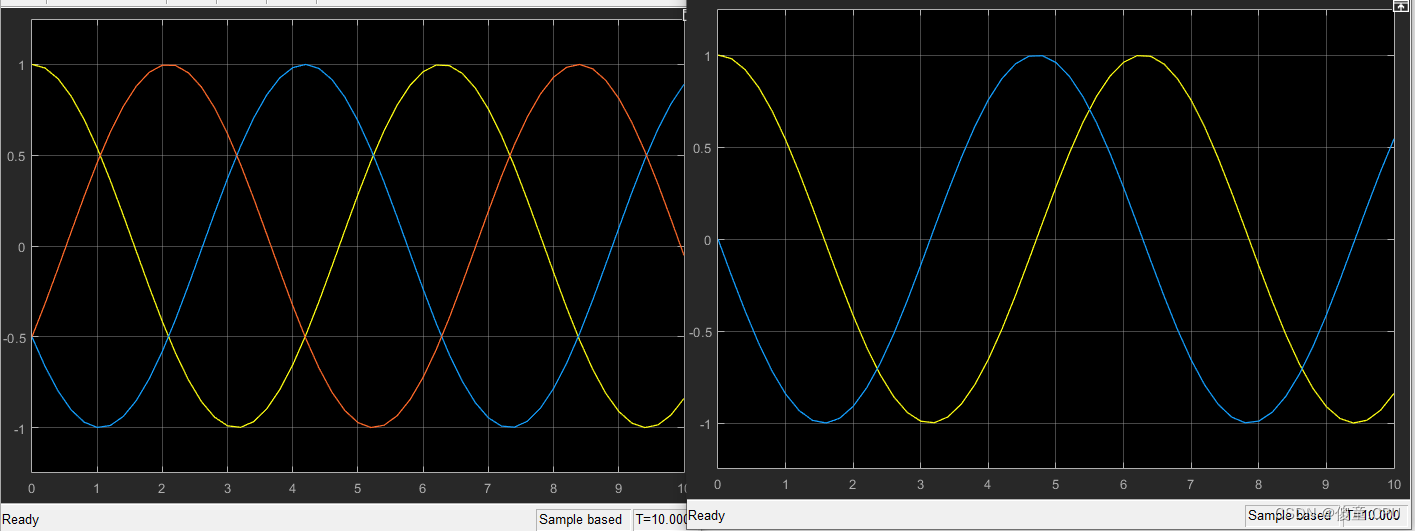
Clark仿真如下:
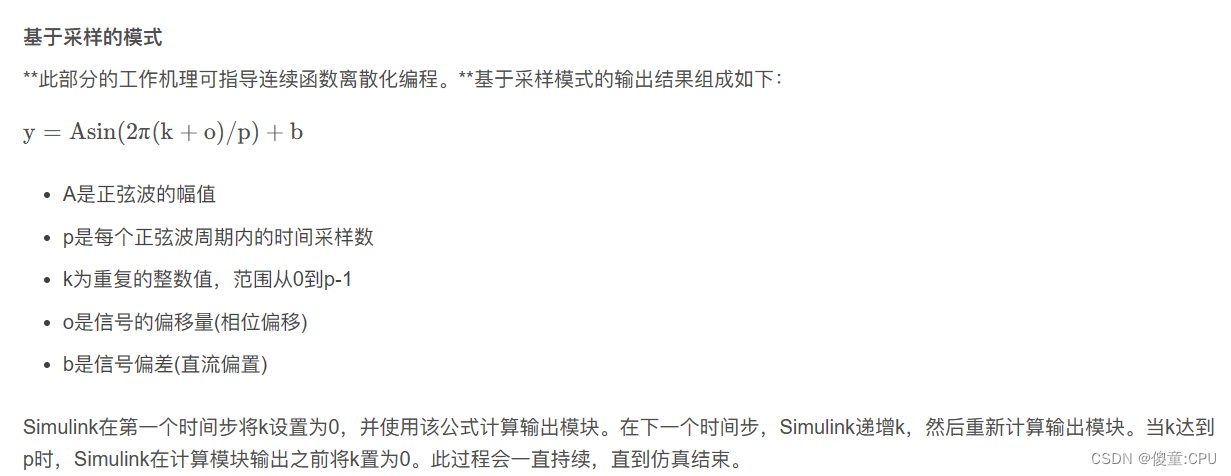
Sine Wave模块分为两种工作模式:基于时间的模式和基于采样的模式。

结果
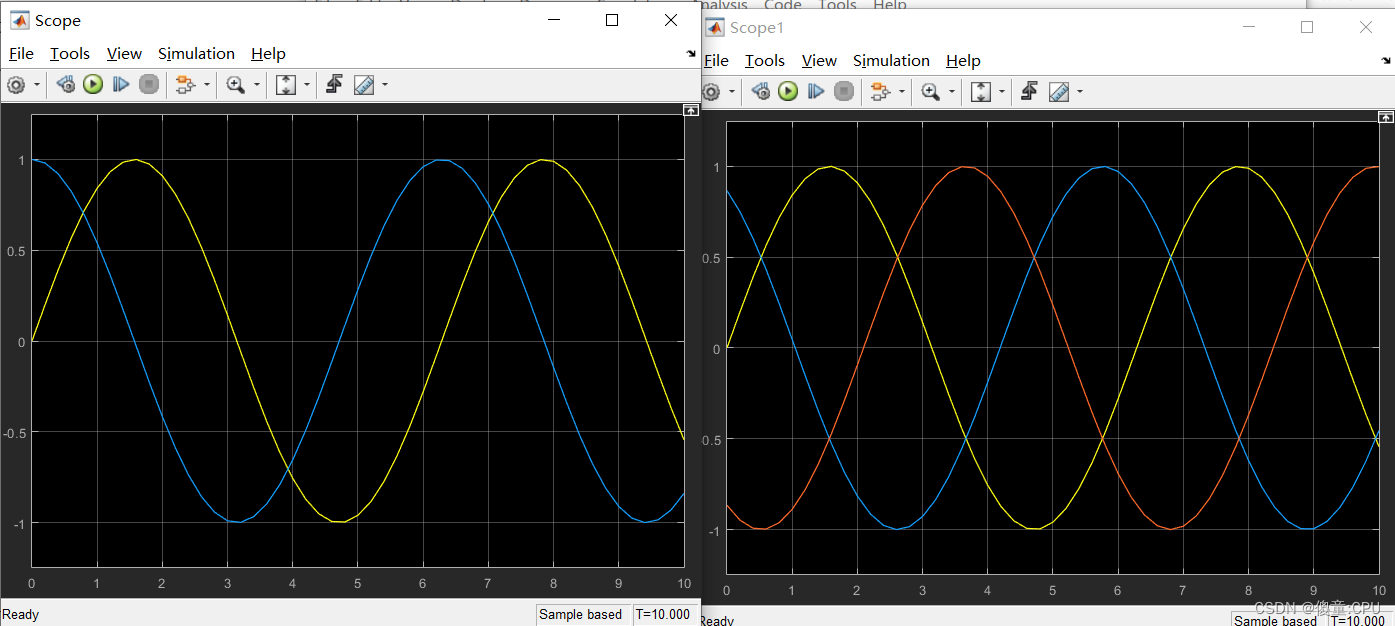
反Clark仿真如下:
同步旋转坐标系
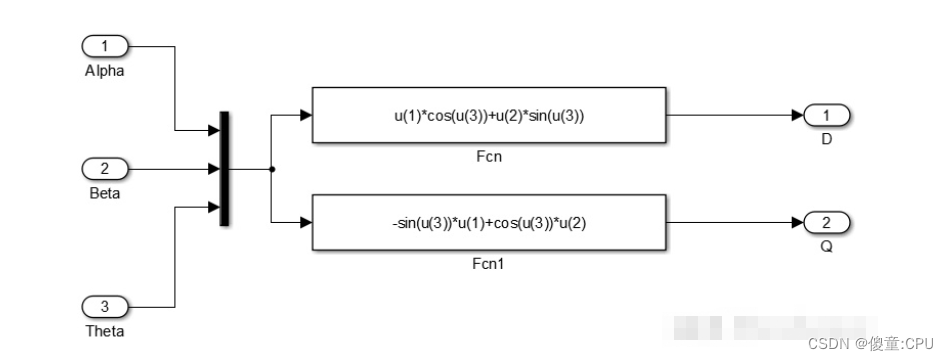
从静止坐标系变换到同步旋转坐标系的坐标变换称为Park变换。
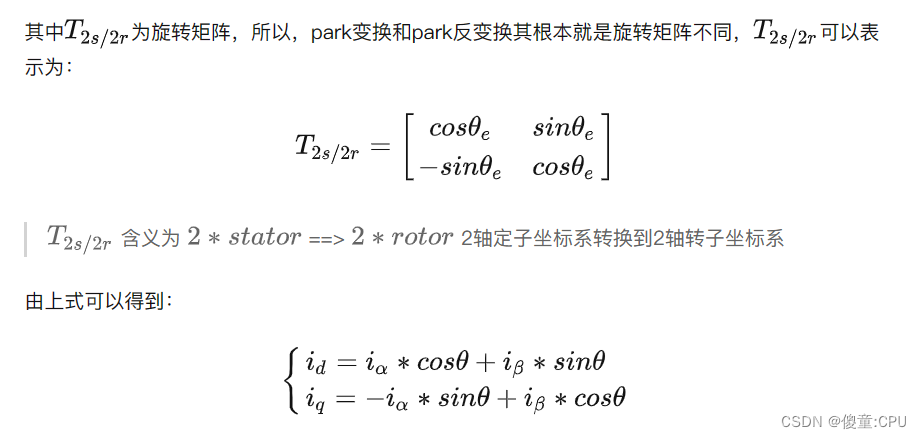
通入的电压/电流在这二轴坐标系中变化:

仿真如下