Linux线程调度实验
Linux线程调度实验
1.获取线程属性
#include <stdio.h>
#include <sys/types.h>
#include <unistd.h>
#include <pthread.h>
#include <time.h>
#include <stdlib.h>
#include <errno.h>
#define _GNU_SOURCE#define handle_error_en(en, msg) \do { errno = en; perror(msg); exit(EXIT_FAILURE); } while (0)static void display_pthread_attr(pthread_attr_t *attr, char *prefix){int s, i;size_t v;void *stkaddr;struct sched_param sp;s = pthread_attr_getdetachstate(attr, &i);if (s != 0) handle_error_en(s, "pthread_attr_getdetachstate");printf("%sDetach state = %s\n", prefix,(i == PTHREAD_CREATE_DETACHED) ? "PTHREAD_CREATE_DETACHED" :(i == PTHREAD_CREATE_JOINABLE) ? "PTHREAD_CREATE_JOINABLE" :"???");s = pthread_attr_getscope(attr, &i);if (s != 0)handle_error_en(s, "pthread_attr_getscope");printf("%sScope = %s\n", prefix,(i == PTHREAD_SCOPE_SYSTEM) ? "PTHREAD_SCOPE_SYSTEM" :(i == PTHREAD_SCOPE_PROCESS) ? "PTHREAD_SCOPE_PROCESS" :"???");s = pthread_attr_getinheritsched(attr, &i);if (s != 0)handle_error_en(s, "pthread_attr_getinheritsched");printf("%sInherit scheduler = %s\n", prefix,(i == PTHREAD_INHERIT_SCHED) ? "PTHREAD_INHERIT_SCHED" :(i == PTHREAD_EXPLICIT_SCHED) ? "PTHREAD_EXPLICIT_SCHED" :"???");s = pthread_attr_getschedpolicy(attr, &i); if (s != 0) handle_error_en(s, "pthread_attr_getschedpolicy"); printf("%sScheduling policy = %s\n", prefix, (i == SCHED_OTHER) ? "SCHED_OTHER" : (i == SCHED_FIFO) ? "SCHED_FIFO" : (i == SCHED_RR) ? "SCHED_RR" : "???"); s = pthread_attr_getschedparam(attr, &sp); if (s != 0) handle_error_en(s, "pthread_attr_getschedparam"); printf("%sScheduling priority = %d\n", prefix, sp.sched_priority); s = pthread_attr_getguardsize(attr, &v); if (s != 0) handle_error_en(s, "pthread_attr_getguardsize"); printf("%sGuard size = %zu bytes\n", prefix, v); s = pthread_attr_getstack(attr, &stkaddr, &v); if (s != 0) handle_error_en(s, "pthread_attr_getstack"); printf("%sStack address = %p\n", prefix, stkaddr); printf("%sStack size = 0x%zx bytes\n", prefix, v); }void* computing(void* arg){int s;pthread_attr_t gattr;s = pthread_getattr_np(pthread_self(), &gattr);if (s != 0)handle_error_en(s, "pthread_getattr_np");printf("Thread attributes:\n");display_pthread_attr(&gattr, "\t");pause();pthread_exit(0);}int main(){pthread_t tid;pthread_attr_t attr;pthread_attr_init(&attr);// 线程创建函数pthread_create(&tid, &attr, computing, NULL);// 等待指定的线程结束pthread_join(tid,NULL);return 0;
}这个库函数报错不用管
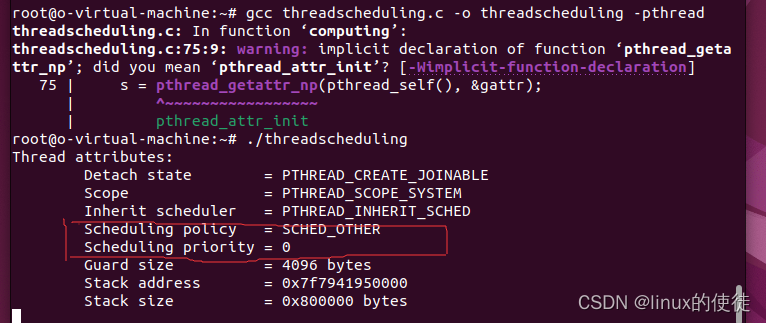 我们可以看到当前进程:
我们可以看到当前进程:
datach state:这个进程是一个joinable,也就是一个可进入等待状态的进程
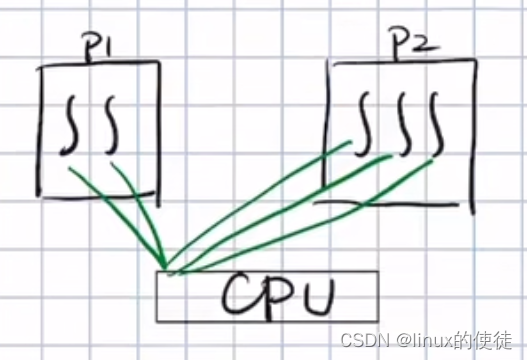
scope:有两种状态
 这两个的区别
这两个的区别
一个是系统范围,一个是进程范围,如果我有多个线程,那么他们的竞争区间是在自己的进程内,还是整个系统的进程内
 系统范围竞争
系统范围竞争
 进程内竞争
进程内竞争
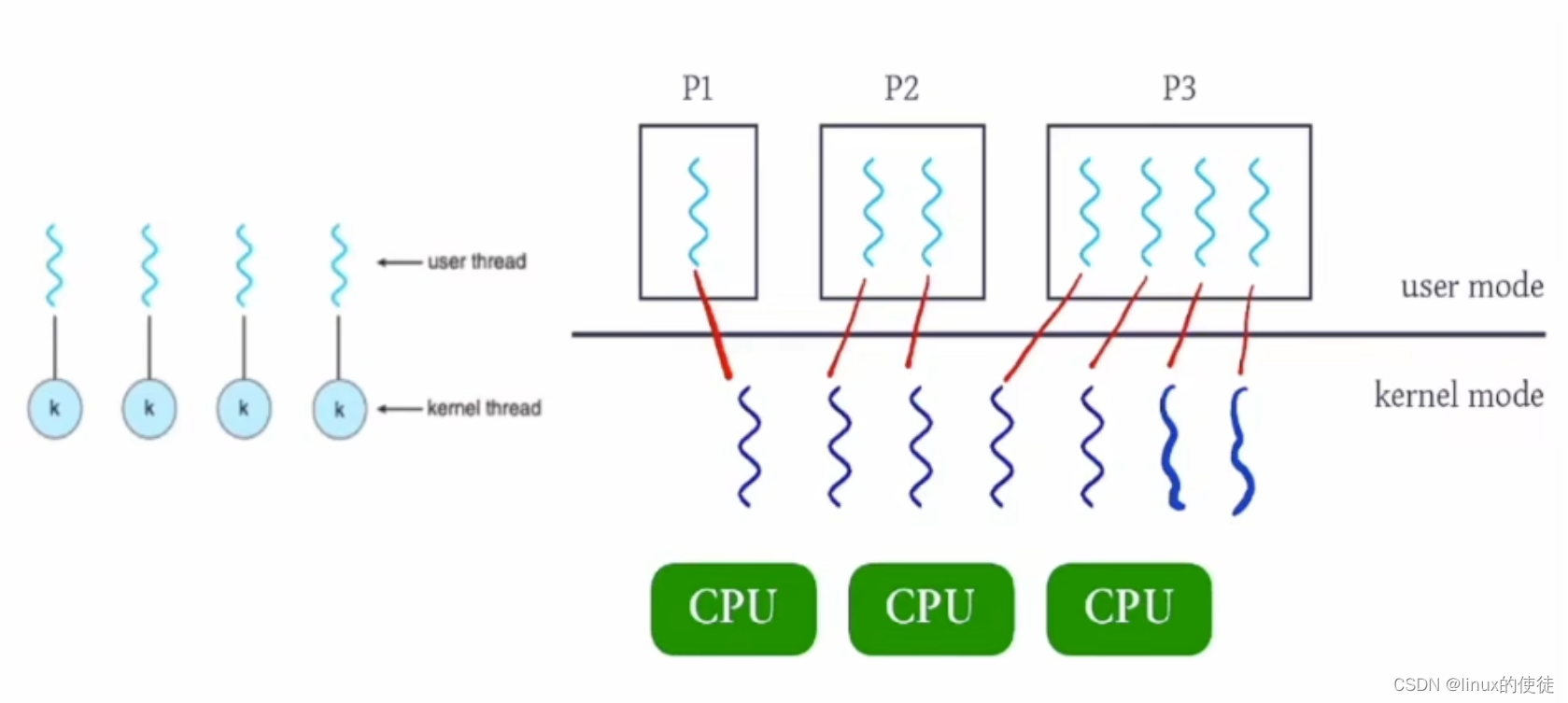
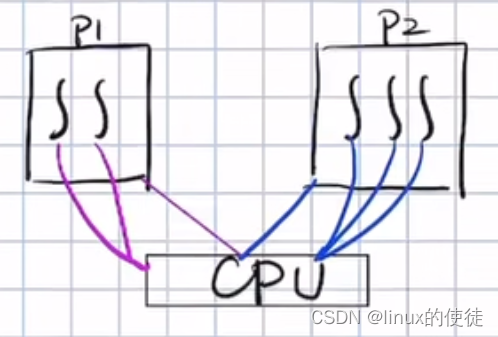 我们linux系统的线程是系统范围竞争,我们前面学了用户模型和系统模型1对1模型,其实linux就是1
我们linux系统的线程是系统范围竞争,我们前面学了用户模型和系统模型1对1模型,其实linux就是1
inherit schedule:调度器是谁

这里可以看出是继承调度,调度器的参数和属性会被这个进程所继承。
执行策略是:SCHED_OTHER

下面两个fifo和RR一个是先进先出,一个是时间片
Linux线程调度策略总共有两种:
-
Normal Scheduling(正常调度):总共有三种,分别为SCHED_OTHER,SCHED_IDLE,SCHED_BATCH, 它的优先级数值priority_value需要设置成0,但这里并不一定意味着这个进程优先级很高,因为这个0是默认值。
-
Real_time Schedulig(实时调度):总共有两种:一种是SCHED_FIFO(先来先服务),SCHED_RR(时间片轮转),实时调度的进程总是比正常调度的进程优先级要高,它的优先级数值priority_value∈[1,99],这里和前面我们学的系统优先级不同,1是低优先级,99是高优先级
实时调度需要延迟非常低才可以实现,所以现在用户模式的进程基本都是一般都是正常调度的。
这里SCHED_OTHER是RR,现在默认的状态是这个。
linux中优先级越低,进程或线程的优先级越高
PR值越高优先级越低
一般nice值默认为0

SCHED_IDLE:一般是周期性计划任务,清理磁盘等,优先级不是很高。
可以使用 ps -eLl来查看当前线程

 LWP, light weight process 这里是4544和4545是用户模式产生的线程id
LWP, light weight process 这里是4544和4545是用户模式产生的线程id
NLWP,Number of Light-Weight Processes
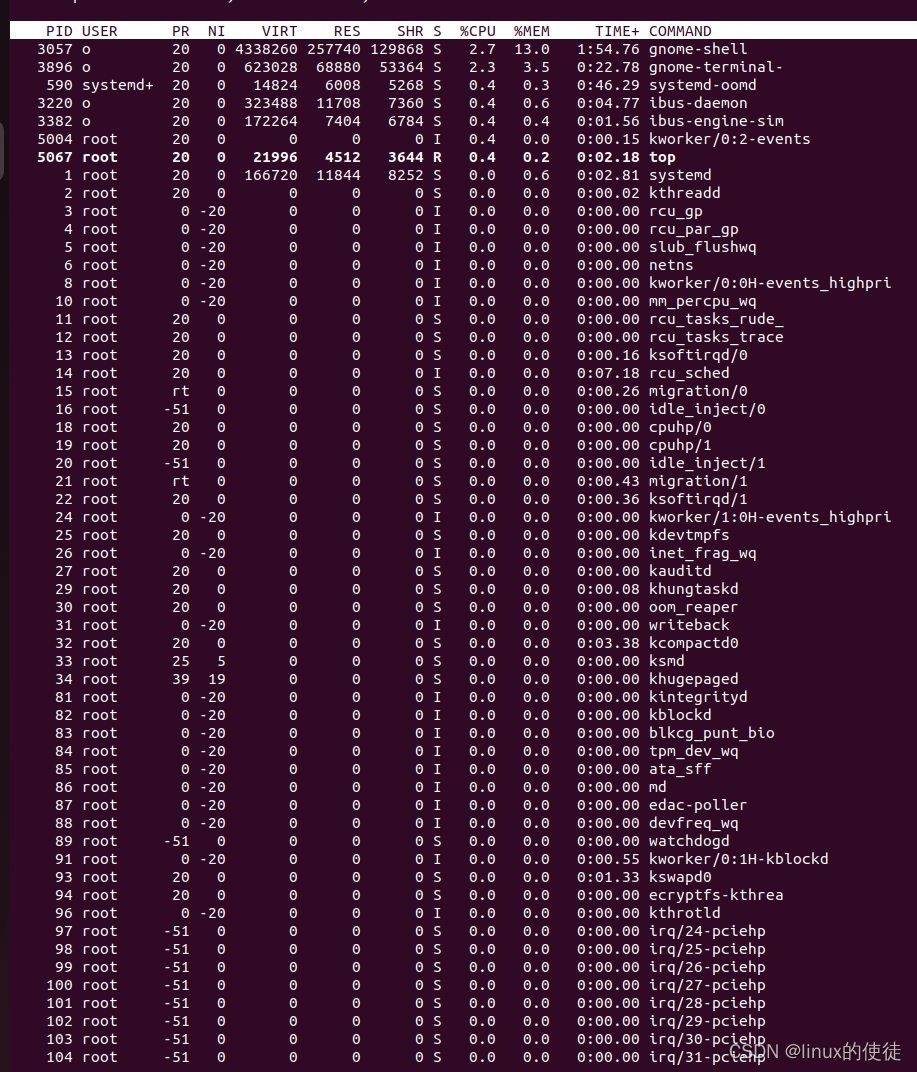
我们再用top看下
PR值为rt(实时进程)、负数(实时进程)、0(优先级极高),默认值20。
NI(nice)值:默认为0
 top -p 4544
top -p 4544
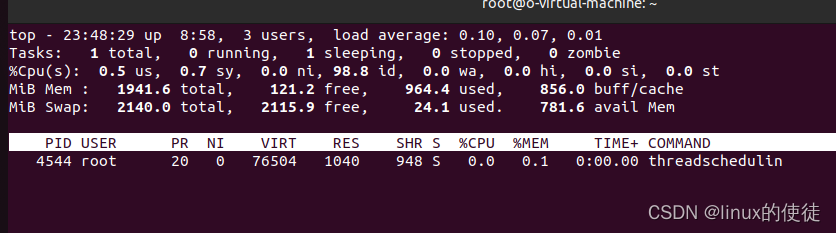
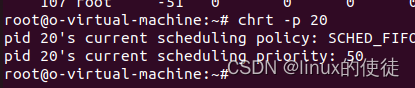
单看下当前进程的调度策略
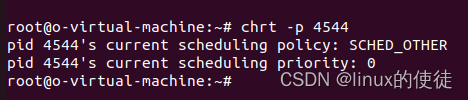 看一个real time的进程
看一个real time的进程

nice值仅在用户模式下有用
Real_time Scheduling【包含FIFO和RR】:
它的PR值计算公式为:PR = -1 - priority_value
所以PR∈[-100,-2]

可以看出左轴从-1开始都是rt的进程
所以我们可以通过PR值来判断一个进程/线程是Noraml Thread还是Real-time thread,是正数就
是Noraml Thread,是负数就是Real-time thread。
PR值=100


 -r转化成RR策略的rt进程
-r转化成RR策略的rt进程
-f转化成Fifo策略的rt进程
value 1~99 , 99代表优先级最高
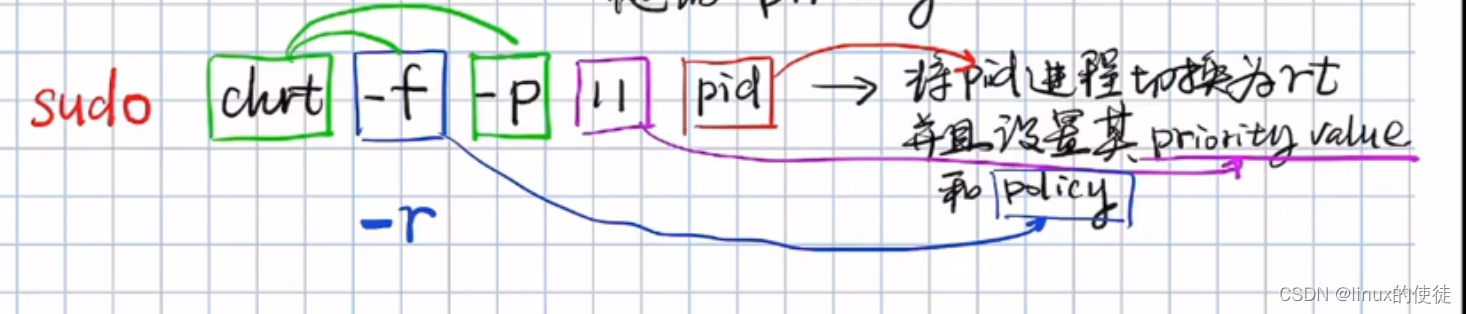 我们把我们执行的这个进程转为fifo策略的real time 进程
我们把我们执行的这个进程转为fifo策略的real time 进程

sudo chrt -f -p 11 4544

-1-value
