Open3d入门
目录
点云数据
1 主成分分析
1.1 Method
1.2 Results
2 表面法线估计
2.1 Method
2.2 Results
3 体素网格下采样
3.1 Method
3.2 Results
点云数据
常用数据下载(免积分)
1 主成分分析
1.1 Method
对点云进行主成分分析(PCA)的方法主要有三个步骤:
(1)通过中心进行归一化:
(2)计算SVD或相关性:
(3)主向量是Ur的列向量。(X的特征向量=H的特征向量)。
1.2 Results
2 表面法线估计
2.1 Method
三维点云的表面法线估计方法主要有三个步骤。
对于任何一个点P:
(1)找到它的K最近的邻居,这些邻居定义了一个表面;
(2)对这些点应用PCA;
(3)P处的表面法线是PCA的最小特征值对应的特征向量。
2.2 Results
3 体素网格下采样
3.1 Method
对三维点云进行体素网格下采样的方法主要有六个步骤。
(1) 计算点集的最小或最大:
同理计算出
(2) 确定体素网格大小r。
(3) 计算体素网格的维度:

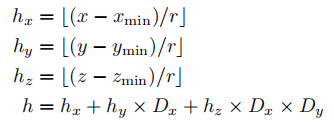
(4) 计算每个点的体素索引。
(5) 使用哈希函数将每个点映射到中的一个容器
。
(6) 迭代{G_1,G_2,...,G_M},得到M个点。