matlab-对数据集加噪声并实现tsne可视化
matlab-对数据集加噪声并实现tsne可视化
最近才知道,原来可以不用模型,也能实现对数据集数据的可视化。
**一、**以COIL-100数据集为例子。
问题:
前提:首先对COIL-100数据集根据角度0°-175°和180°-255°,分别划分成C1,C2两个子数据集。
目的:
①实现C1-C2的tsne可视化;
②对COIL-100数据集添加遮挡物,实现C1-C2的tsne可视化。
平台:
matlabR2019b 以及 Pycharm2022
**
二、解决方法
**
(1)首先获取得到我们的COIL-100的数据集,以及划分好的C1,C2数据集:
(2)----------对数据集图片添加遮挡物----------
分别对COIL-100-1和COIL-100-2数据集添加遮挡物:
我借鉴了这个博客数据增强-在图片中添加遮挡物
这个博客是对数据集添加不规则的五边形,我自己改成了:添加长方体遮挡物,且位置随机,python代码如下:
import randomimport itertoolsimport os
import PIL.Image as Image
import PIL.ImageDraw as ImageDraw# 原始图片的存放位置
PATH = 'C:/Users/lenovo/Documents/MATLAB/COIL-Augment-tsne/data/COIL-100/'
# 新生成的图片的保存位置
SAVE_PATH= 'C:/Users/lenovo/Documents/MATLAB/COIL-Augment-tsne/data/COIL-100-noise-10x10/'
# 要在图片上生成几边形的物体,N=5代表五边形
N = 4def drawObs(path, savePath, n):for file in os.listdir(path):if not file.lower().endswith(('.bmp', '.dib', '.png', '.jpg', '.jpeg', '.pbm', '.pgm', '.ppm', '.tif', '.tiff')):continueimg = Image.open(path + file)(x, y) = img.sizerandom_list = list(itertools.product(range(1, x), range(1, y)))points = random.sample(random_list, n)draw = ImageDraw.Draw(img)x = random.randint(0, 255)#ImageDraw.ImageDraw.polygon(xy=points, fill=(x1, x2, x3), self=draw)draw.rectangle((x,x,x+20,x+10),fill=(0,0,0))img.save(savePath + 'rand' + file)print(file)if __name__ == '__main__':drawObs(PATH, SAVE_PATH, N)于是,我们得到 添加了随机遮挡物的C1和C2数据集:COIL-100-agument-1和COIL-100-agument-2.
(3)----------数据集转换为.mat文件----------
分别将COIL-100-1, COIL-100-2, COIL-100-agument-1 和 COIL-100-agument-2,四个数据集转换成.mat文件。
.png向.mat文件转换的代码,我借鉴了这个博客将COIL数据集转换成.mat文件
clear
clc
path = 'D:\COIL\coil-100\'; %源数据集路径
save_path = 'D:\COIL\'; %处理之后保存的路径
file = dir([path,'*.png']); %列出源路径下所有.png文件的信息:name date bytes...COIL = [];
Label = [];
for i = 1:length(file) %源路径下png文件的个数%%%%对图片本身数据做处理image0 = imread([path,file(i).name]); %读取某一张图片str = file(i).name; %图片名保存为strimage1 = rgb2gray(image0); %将彩图转换为灰度图像image2 = im2double(image1); %将图片中unit8转换为double[a,b] = size(image2); %a为图片行数 b为图片列数image3 = reshape(image2,1,a*b); %将a*b的图片转换为1行COIL = [COIL;image3]; %每一张图片都加载在上一张图片的下一行fprintf('%d th starting...\n',i); %记录程序运行过程%%%%对图片标签做处理 图片名为‘obj(类标签)__(拍摄角度).png’%主要提取类标签LabelStart = strfind(str,'j'); %找到图片名‘j’的位置(类标签前)LabelEnd = strfind(str,'_'); %找到图片名‘__’的位置(类标签后)label_temp = str2double(str(LabelStart+1:LabelEnd(1,1)-1)); %提取出图片类标签Label = [Label;label_temp]; %每个类标签按顺序排排坐
endsave savepath COIL Label注意:
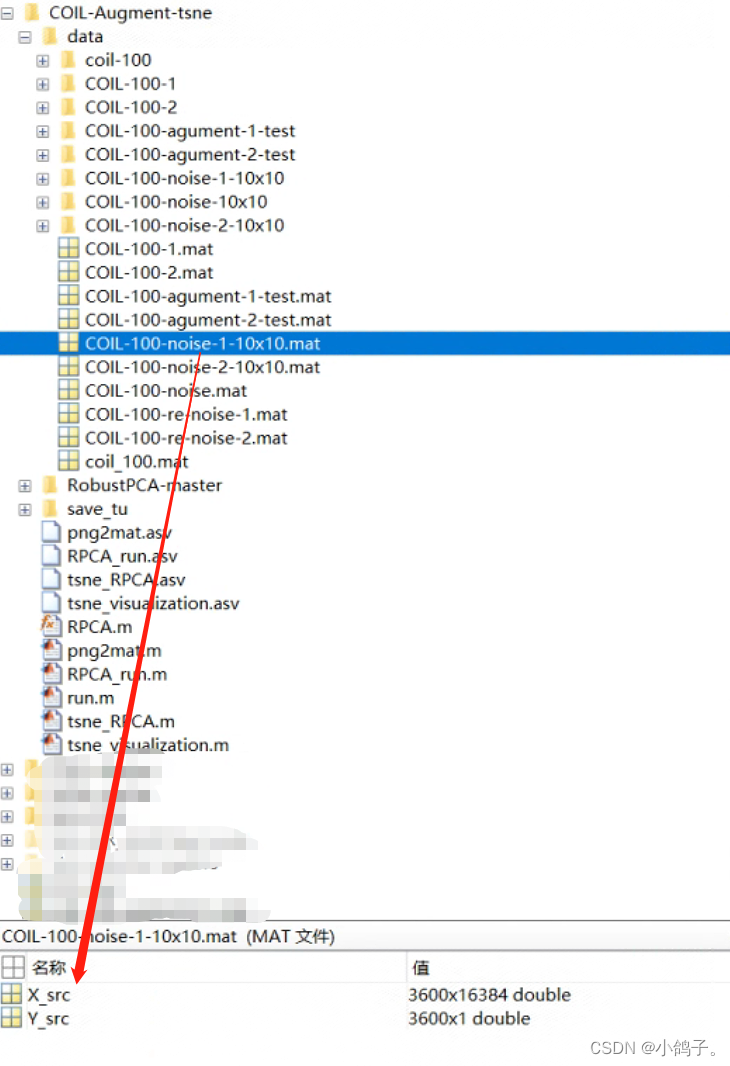
①保存的COIL-100-1 和 COIL-100-augment-1 图片保存为X_src,图片标签保存为Y_src,即上述代码中的COIL和Label;
②保存的COIL-100-2 和 COIL-100-augment-2 图片保存为X_tar,图片标签保存为Y_tar,即上述代码中的COIL和Label;
即生成的.mat文件如下图所示:
(4)最后分别将COIL-100-1和COIL-100-2可视化;以及COIL-100-agument-1 和 COIL-100-agument-2可视化。
matla可视化代码如下:
%%% tsne visulization
clc;
clear;
addpath('tSNE_matlab');savefile1 = 'C:\Users\lenovo\Documents\MATLAB\COIL-Augment-tsne\data\COIL-100-agumnet-1.mat';
savefile2 = 'C:\Users\lenovo\Documents\MATLAB\COIL-Augment-tsne\data\COIL-100-agumnet-2.mat';load(savefile1);
load(savefile2);
% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Xs=X_src;
Xt=X_tar;
X=[Xs;Xt];color1=[1,0,0];%red
color2=[0,0,1];%blue
Y1=[repmat(color1,[length(Y_src),1]);repmat(color2,[length(Y_tar),1])];mappedX = tsne(X, Y1, 2,100,30);savefile = ['C:\Users\lenovo\Documents\MATLAB\COIL-Augment-tsne\save_tu\map_COIL_100_10x10','.mat'];
save(savefile, 'mappedX','X_src','X_tar','Y_src','Y_tar');完成。