计算机视觉之三维重建(一)(摄像机几何)
针孔摄像机
- 添加屏障: 使用针孔(
o=光圈=针孔=摄像机中心),实现现实与成像一对一映射,减少模糊。其中针孔与像平面的距离为f(焦距);虚拟像平面位于针孔与真实物体之间,与像平面互为倒立关系。 - 位置映射:利用相似三角形得到现实坐标在像平面上的映射坐标。
- 光圈:随着光圈减小,成像愈加清晰且愈暗。
透镜
- 将多条光线汇聚到胶片上,增加成像亮度。
PS:所有平行于光轴的光线都会汇聚到焦点,焦点到透镜中心的距离成为焦距;穿过中心的光线的方向不发生改变。- 失焦:透镜将光线汇聚到胶片上,聚焦有特定距离。
- 径向畸变:枕形畸变、桶形畸变。远离针孔中心的光线更加弯曲。
摄像机几何
- 空间中的点(以摄像机光圈为原始点)与图像坐标对映:利用投影矩阵(每个相机固定参数)实现线性变换。
- 投影矩阵:代表映射关系。
PS:摄像机偏斜:图像坐标系非垂直情形,夹角参数放入投影矩阵。
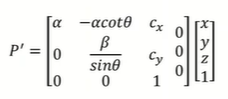
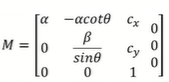
( x , y , z ) (x,y,z) (x,y,z)现实坐标, M M M为投影矩阵,其中 M M M的前三列为摄像机的内参数矩阵(完全决定空间点到图像点的映射)。
规范化投影变换:图像坐标与现实坐标一致。
世界坐标系
不以相机光圈为起始点的转换,无非是多加一个转换矩阵。