VTK 判断一个 点 是否在一个模型 stl 内部 vtk 点是否在内部 表面 寻找最近点
判断 一个点 ,判断是否在风格 stl 模型内部,或表面:
目录
1.方案一:使用vtkCellLocator FindClosestPoint 找到模型上距离给定点最近的一点,计算两点的距离 ,小于某一阈值 则认为此点在模型上;
2.方案二 使用 vtkKdTreePointLocator
3.方案三 使用 vtkSelectEnclosedPoints
1.方案一:使用vtkCellLocator FindClosestPoint 找到模型上距离给定点最近的一点,计算两点的距离 ,小于某一阈值 则认为此点在模型上;
vtkCellLocator本身是一个octree。典型的用法就是求最近的单元或者点
bool CheckPointInsidePolyData(vtkPolyData * poly, double* pt)
{bool inside=false; auto cellLocator = vtkSmartPointer<vtkCellLocator>::New();cellLocator->SetDataSet(poly);cellLocator->BuildLocator();auto assistCell = vtkSmartPointer<vtkGenericCell>::New();double closestPoint[3];//the coordinates of the closest point will be returned heredouble closestPointDist2; //the squared distance to the closest point will be returned herevtkIdType cellId; //the cell id of the cell containing the closest point will be returned hereint subId=-1;cellLocator->FindClosestPoint(point, closestPoint, assistCell, cellId, subId, closestPointDist2);if (-1!= subId&&closestPointDist2 < 0.001){return true;}return inside;
}2.方案二 使用 vtkKdTreePointLocator
但这个只能找到最新的点,还需要自己判断一下距离
官方样例:
#include <vtkIdList.h>
#include <vtkKdTreePointLocator.h>
#include <vtkNew.h>
#include <vtkPoints.h>
#include <vtkPolyData.h>int main(int, char*[])
{// Setup point coordinatesdouble x[3] = {1.0, 0.0, 0.0};double y[3] = {0.0, 1.0, 0.0};double z[3] = {0.0, 0.0, 1.0};vtkNew<vtkPoints> points;points->InsertNextPoint(x);points->InsertNextPoint(y);points->InsertNextPoint(z);vtkNew<vtkPolyData> polydata;polydata->SetPoints(points);// Create the treevtkNew<vtkKdTreePointLocator> kDTree;kDTree->SetDataSet(polydata);kDTree->BuildLocator();double testPoint[3] = {2.0, 0.0, 0.0};// Find the closest points to TestPointvtkIdType iD = kDTree->FindClosestPoint(testPoint);std::cout << "The closest point is point " << iD << std::endl;// Get the coordinates of the closest pointdouble closestPoint[3];kDTree->GetDataSet()->GetPoint(iD, closestPoint);std::cout << "Coordinates: " << closestPoint[0] << " " << closestPoint[1]<< " " << closestPoint[2] << std::endl;return EXIT_SUCCESS;
}3.方案三 使用 vtkSelectEnclosedPoints
vtkSelectEnclosedPoints类可以判断标记点是否在封闭表面内。
vtkSelectEnclosedPoints是一个Filter,它计算所有输入点以确定它们是否位于封闭曲面中。过滤器生成一个(0,1)掩码(以vtkDataArray的形式),指示点是在提供的曲面的外部(掩码值=0)还是内部(掩码值=1)(输出vtkDataArray的名称是“SelectedPoints”。)
运行过滤器后,可以通过调用IsInside(ptId)方法来查询点是否在内部/外部。
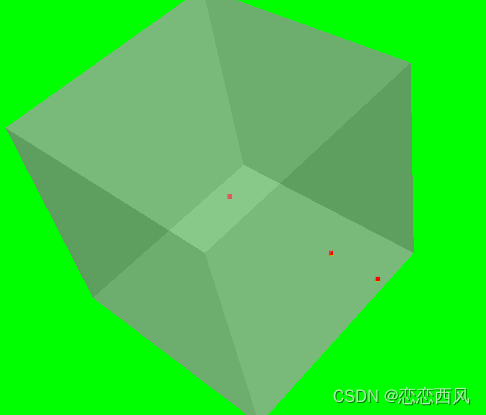
样例:判断三个点是否在立方体内
注意:在立方体边上的点,不属于在立方体内部;
CODE
#include <vtkVersion.h>
#include <vtkPolyData.h>
#include <vtkPointData.h>
#include <vtkCubeSource.h>
#include <vtkSmartPointer.h>
#include <vtkSelectEnclosedPoints.h>
#include <vtkIntArray.h>
#include <vtkDataArray.h>
#include <vtkProperty.h>
#include <vtkPolyDataMapper.h>
#include <vtkActor.h>
#include <vtkRenderWindow.h>
#include <vtkRenderer.h>
#include <vtkRenderWindowInteractor.h>int main(int, char*[])
{vtkNew<vtkCubeSource> cubeSource;cubeSource->Update();vtkPolyData* cube = cubeSource->GetOutput();double testInside[3] = { 0.0, 0.0, 0.0 };double testOutside[3] = { 0.7, 0.0, 0.0 };double testBorderOutside[3] = { 0.5, 0.0, 0.0 };vtkNew<vtkPoints> points;points->InsertNextPoint(testInside);points->InsertNextPoint(testOutside);points->InsertNextPoint(testBorderOutside);vtkNew<vtkPolyData> pointsPolydata;pointsPolydata->SetPoints(points);//Points inside testvtkNew<vtkSelectEnclosedPoints> selectEnclosedPoints;selectEnclosedPoints->SetInputData(pointsPolydata);selectEnclosedPoints->SetSurfaceData(cube);selectEnclosedPoints->Update();for (unsigned int i = 0; i < 3; i++) {std::cout << "Point " << i << ": " << selectEnclosedPoints->IsInside(i) << std::endl;}vtkDataArray* insideArray = vtkDataArray::SafeDownCast(selectEnclosedPoints->GetOutput()->GetPointData()->GetArray("SelectedPoints"));for (vtkIdType i = 0; i < insideArray->GetNumberOfTuples(); i++) {std::cout << i << " : " << insideArray->GetComponent(i, 0) << std::endl;}//Cube mapper, actorvtkNew<vtkPolyDataMapper> cubeMapper;cubeMapper->SetInputConnection(cubeSource->GetOutputPort());vtkNew<vtkActor> cubeActor;cubeActor->SetMapper(cubeMapper);cubeActor->GetProperty()->SetOpacity(0.5);//First, apply vtkVertexGlyphFilter to make cells around points, vtk only render cells.vtkNew<vtkVertexGlyphFilter> vertexGlyphFilter;vertexGlyphFilter->AddInputData(pointsPolydata);vertexGlyphFilter->Update();vtkNew<vtkPolyDataMapper> pointsMapper;pointsMapper->SetInputConnection(vertexGlyphFilter->GetOutputPort());vtkNew<vtkActor> pointsActor;pointsActor->SetMapper(pointsMapper);pointsActor->GetProperty()->SetPointSize(5); pointsActor->GetProperty()->SetColor(1.0, 0.0, 0);//Create a renderer, render window, and interactorvtkNew<vtkRenderer> renderer;vtkNew<vtkRenderWindow> renderWindow;renderWindow->AddRenderer(renderer);vtkNew<vtkRenderWindowInteractor> renderWindowInteractor;renderWindowInteractor->SetRenderWindow(renderWindow);// Add the actor to the scenerenderer->AddActor(cubeActor);renderer->AddActor(pointsActor);renderer->SetBackground(.0, 1, .0);renderWindow->Render();renderWindowInteractor->Start();return EXIT_SUCCESS;
}输出:
Point 0: 1
Point 1: 0
Point 2: 0
0 : 1
1 : 0
2 : 0