Linux驱动入门(6.2)按键驱动和LED驱动 --- 将逻辑电平与物理电平分离
前言
(1)在学习完Linux驱动入门(6)LED驱动—设备树之后,我们发现一个问题,设备树明明的gpios信息明明有三个元素gpios = <&gpio5 3 GPIO_ACTIVE_LOW>; &gpio5 3 用来确定控制那个引脚,而GPIO_ACTIVE_LOW究竟有什么用呢?
(2)通过前面的实验,我们发现,GPIO_ACTIVE_LOW似乎是没有使用上的。那么写上这个有什么用呢?
(3)Linux设备树中既然设置了这个元素,那么肯定是有意义的。接下来,我将讲解Linux中逻辑电平和物理电平之间的关系。
逻辑电平的意义
为什么需要逻辑电平
(1)在前面的代码里面,我们发现如果这个LED驱动硬件发生了改动,比如GND和VCC位置调整一下,代码就要进行比较多的改动。因为Linux的代码很多,很容易漏掉某个地方,导致硬件上的小改动,明明写好的软件又要做很多工作,调试,检查。
(2)Linux要与硬件进行强隔离,所以提出了逻辑电平的概念。
逻辑电平和物理电平的关系
(1)物理电平就是真实的电压值,物理电平1是指真实的高电平。例如TTL标准中,如果引脚接受到的是3.3V,那么就是1。如果引脚接受到的是0V,那么就是0。
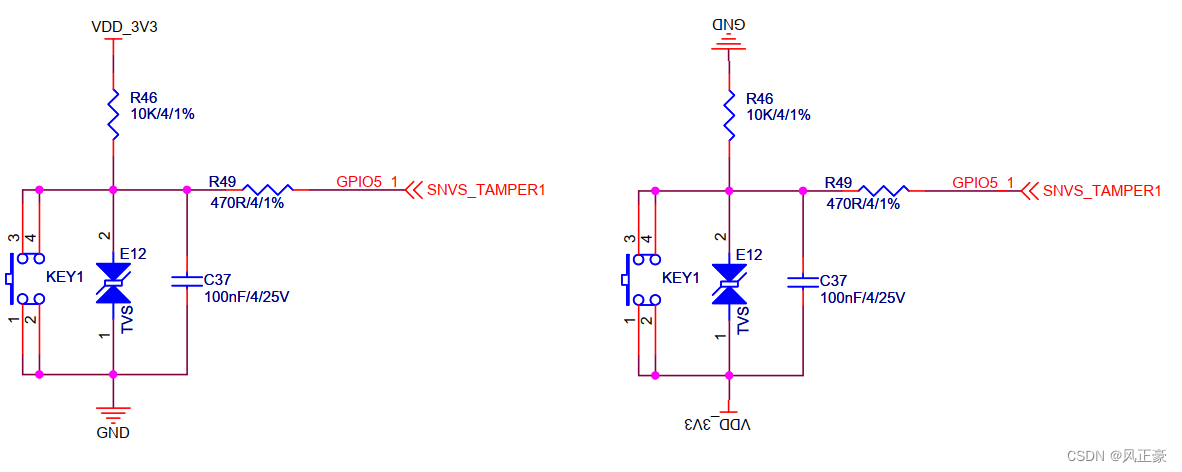
(2)逻辑电平就是抽象出来的逻辑状态,逻辑电平的1是指有效电平。例如,上面左边的图,按键被按下,引脚为低电平,因此低电平是有效电平,对于这个按键的逻辑电平来说,1就是低电平。而右边这张图相反。
引入逻辑电平的好处
(1)引入逻辑电平之后,如果硬件只是有效电平发生了改变,驱动程序上就不再需要改动了。我们只需要将设备树中的gpios = <&gpio5 3 GPIO_ACTIVE_LOW>;改成gpios = <&gpio5 3 GPIO_ACTIVE_HIGH>;即可。
(2)这样做,能够实现软件和硬件上的强隔离作用,让同一个驱动程序对于各种类似的硬件上有更高适配能力。
编程中与上文的区别
(1)在讲解Linux驱动入门(4)LED驱动的时候,我提及了几个GPIO子系统函数进行了讲解介绍。而本文需要讲解的函数,其本质上也不过是这个几个函数的微调,底层调用的函数大差不差,感兴趣的可以自行阅读源码。既然只是微调,为什么不把老版本的删了?这当然是为了兼容老版本代码,所以没有删除他们。
of_get_gpio_flags()获取GPIO信息
函数介绍
(1)在上文中,我们获取gpio引脚号是调用的of_get_gpio()这个函数,而本文是使用的of_get_gpio_flags()函数。
(2)如果阅读源码会发现,of_get_gpio()就是调用的of_get_gpio_flags()函数,不过第三个参数是传入的一个空指针,并没有获取有效电平信息。

/* 作用 : 从设备树中获取GPIO引脚的标志信息的函数* 传入参数 :* np :设备节点* index : 节点中的索引* flags : 存储有效电平的信息* 返回值 : GPIO的引脚号
*/
int of_get_gpio_flags(struct device_node *np, int index, enum of_gpio_flags *flags)原来获取GPIO信息
gpios[i].gpio = of_get_gpio(np, i); //获得gpio信息
现在获取GPIO信息
gpios[i].gpio = of_get_gpio_flags(np, i, &flag);
devm_gpio_request_one()设置引脚初始化
函数介绍
(1)在上文中,我们是调用gpio_request()函数申请到GPIO,然后使用gpio_direction_output()函数将引脚设置成输出。
(2)现在这里只需要调用一个devm_gpio_request_one()函数即可。
(3)虽然这里调用的函数少了,但是需要进行的操作也变多了。
/* 作用 : 从设备树中获取GPIO引脚的标志信息的函数* 传入参数 :* dev :要申请GPIO的设备* gpio : 引脚号* flags : 有效电平,引脚的输入输出方向,默认输出电平(物理电平)信息* label : 注册GPIO时候的名字* 返回值 : 如果返回值小于0,表示申请失败
*/
int devm_gpio_request_one(struct device *dev, unsigned gpio,unsigned long flags, const char *label)
原来设置GPIO
/*------------GPIO设置成默认低电平输出------------*/
//申请指定GPIO引脚,申请的时候需要用到名字
err = gpio_request(gpios[i].gpio, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
//如果GPIO申请成功,设置输出低电平
gpio_direction_output(gpios[i].gpio, 0);
/*------------GPIO设置成默认高电平输出------------*/
//申请指定GPIO引脚,申请的时候需要用到名字
err = gpio_request(gpios[i].gpio, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
//如果GPIO申请成功,设置输出高电平
gpio_direction_output(gpios[i].gpio, 1);
/*------------GPIO设置成输入------------*/
//申请指定GPIO引脚,申请的时候需要用到名字
err = gpio_request(gpios[i].gpio, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
//如果GPIO申请成功,设置为输入引脚
gpio_direction_input(gpios[i].gpio);
现在设置GPIO
/*------------GPIO设置成默认低电平输出(注意,这里是物理电平)------------*/
gpios[i].flag = GPIOF_OUT_INIT_LOW; //将GPIO设置成默认低电平输出(注意,这里是物理电平)
if (flag & OF_GPIO_ACTIVE_LOW) //判断有效电平是否为低电平
{gpios[i].flag |= GPIOF_ACTIVE_LOW;
}
printk("gpios[%d].flag is %d \r\n",i,gpios[i].flag);
err = devm_gpio_request_one(&pdev->dev, gpios[i].gpio, gpios[i].flag, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
/*------------GPIO设置成默认高电平输出(注意,这里是物理电平)------------*/
gpios[i].flag = GPIOF_OUT_INIT_HIGH; //将GPIO设置成默认高电平输出(注意,这里是物理电平)
if (flag & OF_GPIO_ACTIVE_LOW) //判断有效电平是否为低电平
{gpios[i].flag |= GPIOF_ACTIVE_LOW;
}
printk("gpios[%d].flag is %d \r\n",i,gpios[i].flag);
err = devm_gpio_request_one(&pdev->dev, gpios[i].gpio, gpios[i].flag, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
/*------------GPIO设置成输入------------*/
gpios[i].flag = GPIOF_IN; //将引脚设置成输入方向
if (flag & OF_GPIO_ACTIVE_LOW) //判断有效电平是否为低电平
{gpios[i].flag |= GPIOF_ACTIVE_LOW;
}
printk("gpios[%d].flag is %d \r\n",i,gpios[i].flag);
err = devm_gpio_request_one(&pdev->dev, gpios[i].gpio, gpios[i].flag, gpios[i].name);
//如果返回值小于0,表示申请失败
if (err < 0)
{//如果GPIO申请失败,打印出是哪个LED申请出现问题printk("can not request gpio %s \n", gpios[i].name);return -ENODEV;
}
gpiod_set_value()设置引脚输出电平(逻辑电平)
函数介绍
(1)上文我们调用gpio_set_value()函数是设置的物理电平,而本文将会使用gpiod_set_value()函数设置逻辑电平。
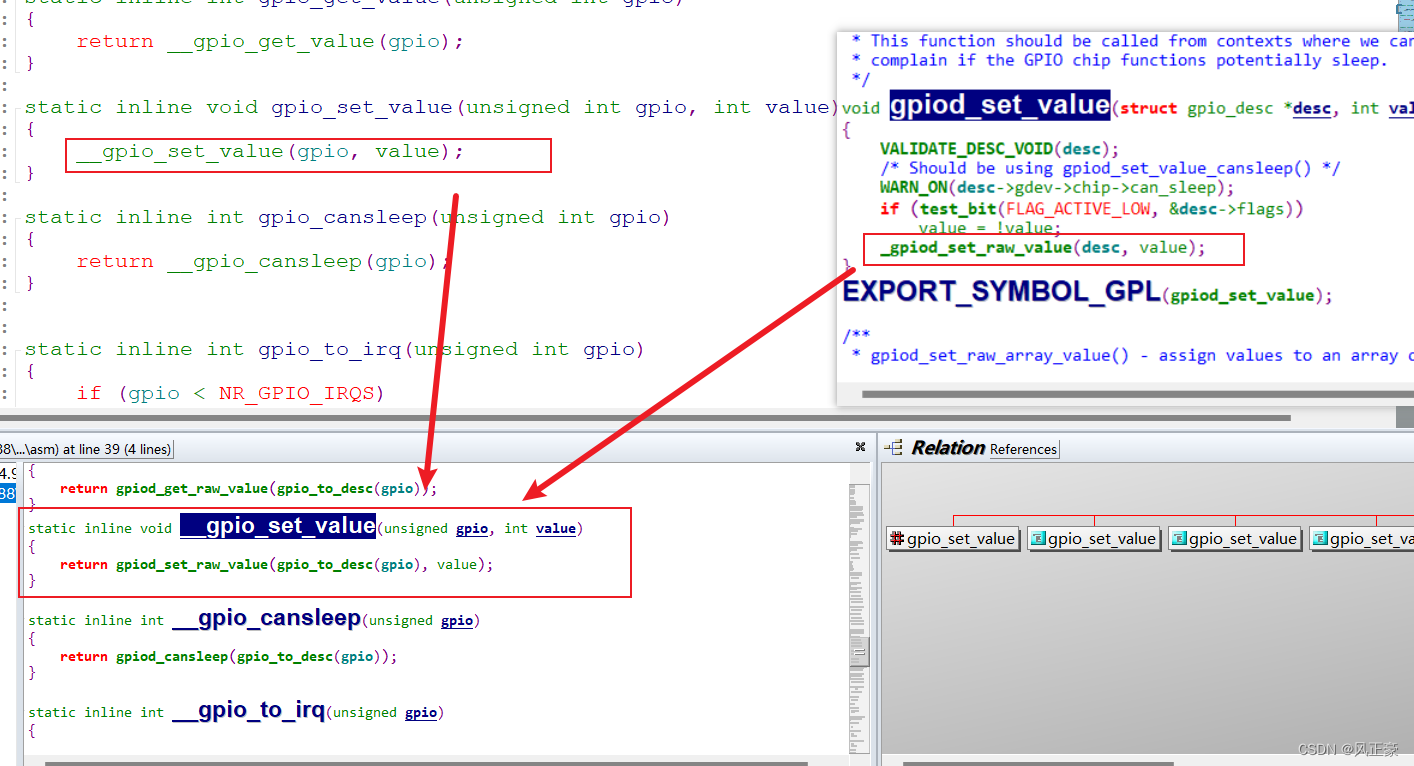
(2)感兴趣的朋友可以看看gpio_set_value()函数和gpiod_set_value()函数的底层实现,我们会发现他们都调用了gpiod_set_raw_value()函数。只不过gpio_set_value()是直接将自己的参数传递进去,而gpiod_set_value()函数会判断有效电平信息,然后根据有效电平信息翻转Value值。
(3)这里需要注意的一点是,gpiod_set_value()函数第一参数传入的是gpio_desc结构体类型指针,而gpio_set_value()传入的是引脚号。我们可以调用gpio_to_desc()函数利用引脚号获得gpio_desc结构体类型指针。
原来设置GPIO输出电平(物理电平)
/* gpios[(int)tmp_buf[0]].gpio是引脚号* tmp_buf[1]是要设置的物理电平信息
*/
gpio_set_value(gpios[(int)tmp_buf[0]].gpio, tmp_buf[1]);
现在设置GPIO输出电平(逻辑电平)
(1)因为gpiod_set_value()函数第一个参数需要传入的是一个gpio_desc结构体。所以我在probe函数中获取,并且存入gpios结构体中。
(2)这里需要注意了,我们现在设置的是逻辑电平了。如果你的LED需要低电平点亮,你在设备树中设置了有效电平是低电平。那么现在gpiod_set_value()函数传入的第二个值,如果是1,输出的其实是低电平!!!
/*---- 在probe函数中我们使用了gpio_to_desc函数获得gpio_desc结构体 */
gpios[i].gpiod = gpio_to_desc(gpios[i].gpio);
/*---- 下面这段是在驱动程序中write函数中修改 */
/* gpios[(int)tmp_buf[0]].gpio是引脚号* tmp_buf[1]是要设置的物理电平信息
*/
gpiod_set_value(gpios[(int)tmp_buf[0]].gpiod, tmp_buf[1]);
需要注意gpio_desc结构体无法被访问
(1)这里有一个注意的点,gpio_desc结构体是Linux内核结构体。他与我们所编写的C文件编译环境是隔离的。所以我们没有访问gpio_desc结构体权限。这个问题卡了我很久,望各位了解。
(2)如果有头铁的兄弟说,哎,我就是牛逼,我就要访问,怎么滴?可以的,我也给头铁的兄弟们提供思路。
// 在对于的内核文件中写入下面这个宏,然后重新编译Linux内核。
EXPORT_SYMBOL(gpio_to_desc);gpiod_get_value()获得引脚电平(逻辑电平)
函数介绍
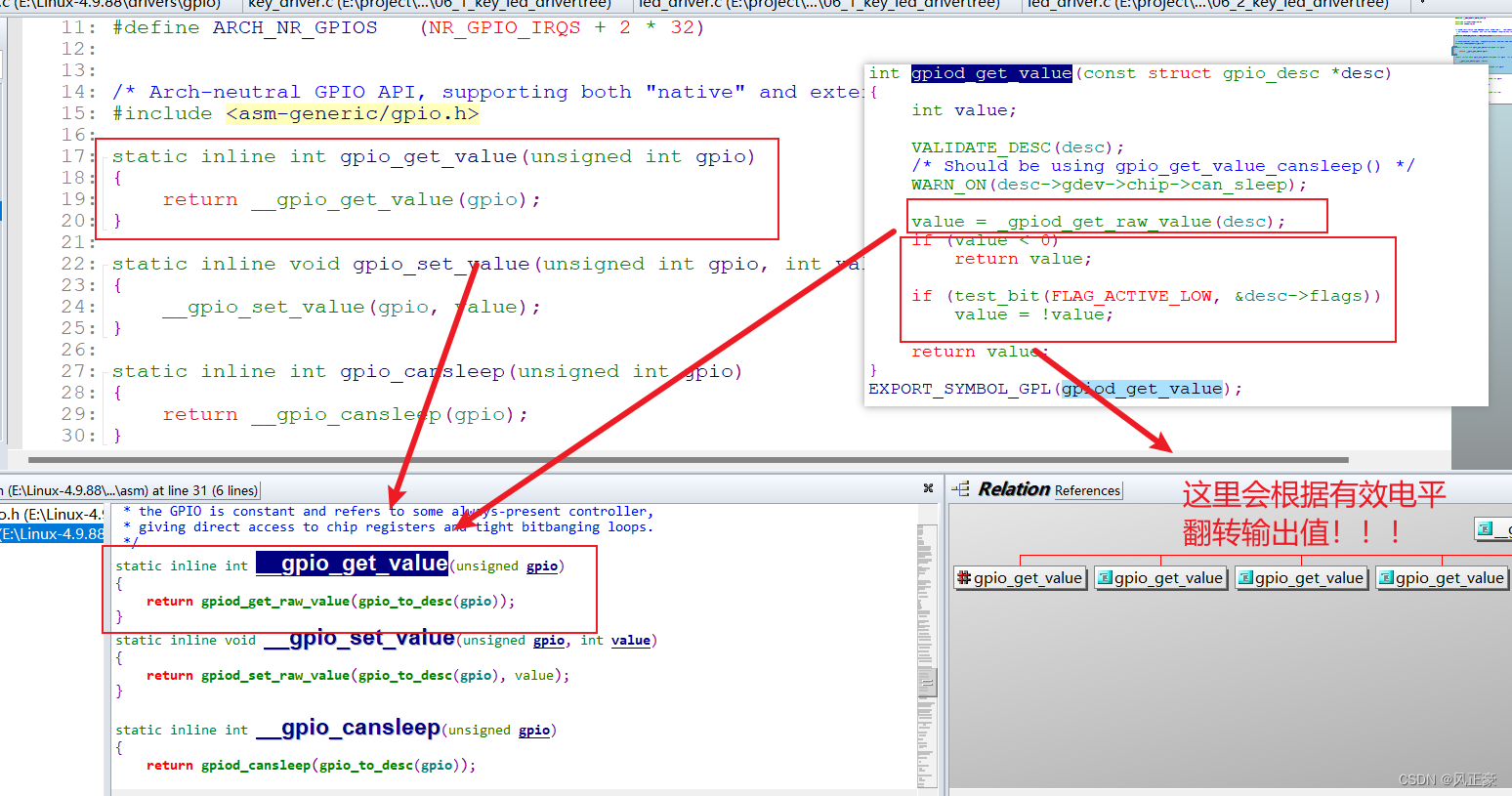
(1)同样的道理,我们阅读gpiod_get_value()和gpio_get_value()函数源码会发现,他们都会调用gpiod_get_raw_value()函数获取真实的物理电平。
(2)但是,gpiod_get_value()会根据设备树中设置的有效电平,翻转gpiod_get_raw_value()函数返回值。而gpio_get_value()函数则是直接将gpiod_get_raw_value()函数返回值输出。
(3)因此gpiod_get_value()返回的是逻辑电平,gpio_get_value()返回的是物理电平。
原来获取GPIO电平(物理电平)
tmp_buf[1] = gpio_get_value(gpios[(int)tmp_buf[0]].gpio);
现在获取GPIO电平(逻辑电平)
(1)同输出电平一样,如果设备树中,LED驱动设置的有效电平是低电平。那么我们调用gpiod_get_value()函数发现LED的物理电平是高电平的时候,他返回的却是0!
tmp_buf[1] = gpiod_get_value(gpios[(int)tmp_buf[0]].gpiod);
总结
(1)将逻辑电平和物理电平隔离之后,驱动文件不再需要修改。如果硬件产生了更换,也只需要修改设备树。
(2)编写应用程序的程序员,也不需要管LED点亮到底是高电平还是低电平,在他眼里,输入1就是点亮,输入0就是熄灭。