ROS学习笔记(三)---好用的终端Terminator
ROS学习笔记文章目录
01. ROS学习笔记(一)—Linux安装VScode
02. ROS学习笔记(二)—使用 VScode 开发 ROS 的Python程序(简例)
一、Terminator是什么?
在前面的学习中,为了运行hello.py我是在vscode频繁的点击运行窗口的“+”号来开启终端的,有时候看起来不是很方便,特别是当有多个节点需要启动的时候,容易找不到对应的运行终端。因此,这里我们使用Terminator终端分屏工具,可以在一个窗口显示多个终端。
二、安装Terminator
1.打开自带的终端,输入以下指令安装Terminator:
sudo apt-get install terminator
2.将Terminator终端放入收藏夹
点击左下角显示应用程序 —> 找到 terminator —> 右击 选择 添加到收藏夹

3.快捷键打开Terminator
安装完Terminator后,可以使用Ctrl+Alt+T打开terminator
三、Terminator的操作
Terminator终端是为了方便我们显示和输入ROS相关指令的,因此有必要了解一些常用的操作技巧
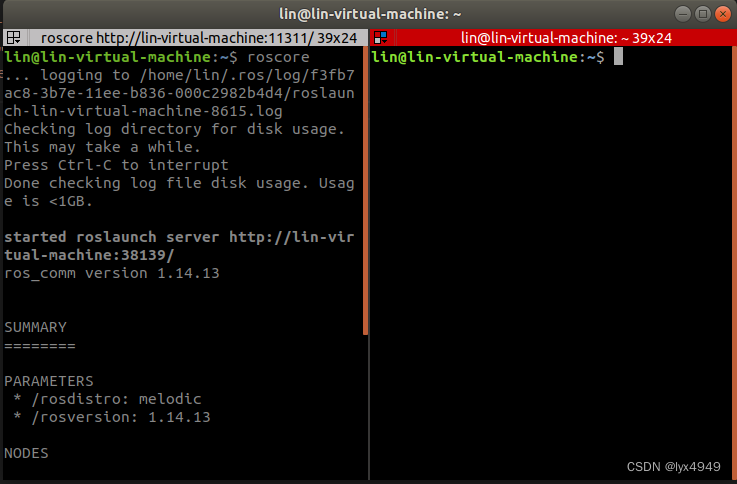
1.垂直分屏:Ctrl+Shift+E
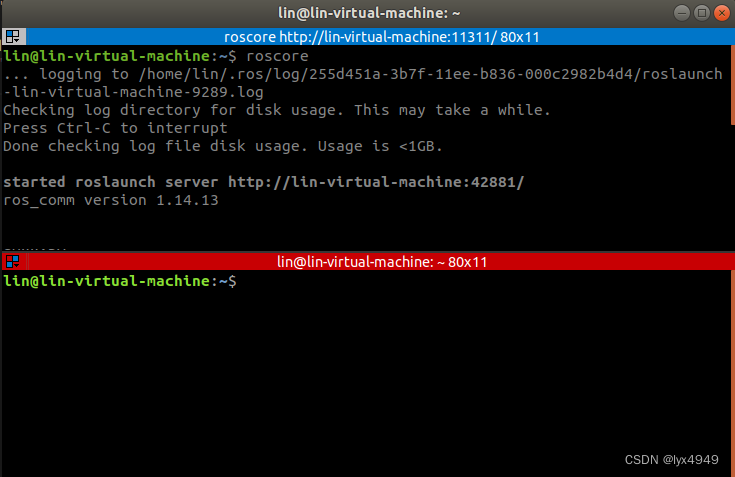
2.水平分屏:Ctrl+Shift+O
3.重开一个新的分屏:Ctrl+Alt+T
4.关闭分屏:Ctrl+Shift+W(点击需要关闭的终端 然后按键Ctrl+Shift+W)
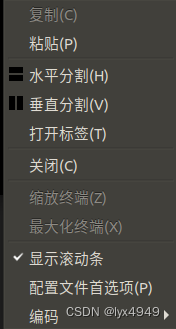
我个人感觉用的比较多的就是上述几个了[破涕为笑]当然如果你记不住快捷键,也可以直接右击,然后选择[破涕为笑][破涕为笑]
四、演示案例
以上一个案例为例,我们使用VSCode打开demo02_ws工作空间。然后Ctrl+Alt+T打开Terminator终端。
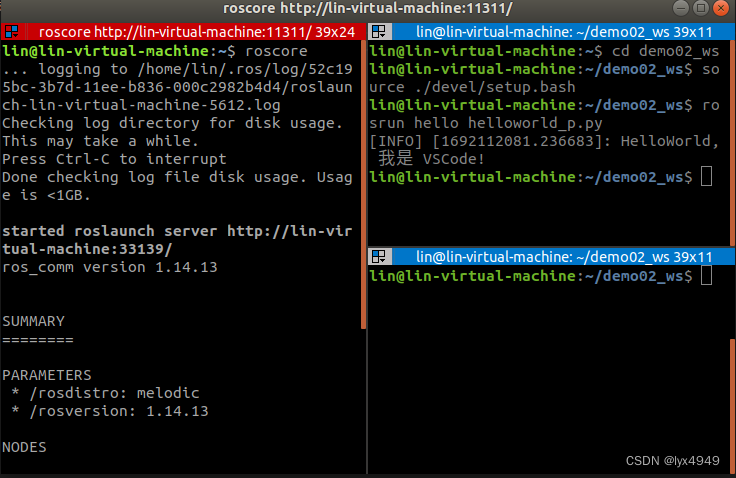
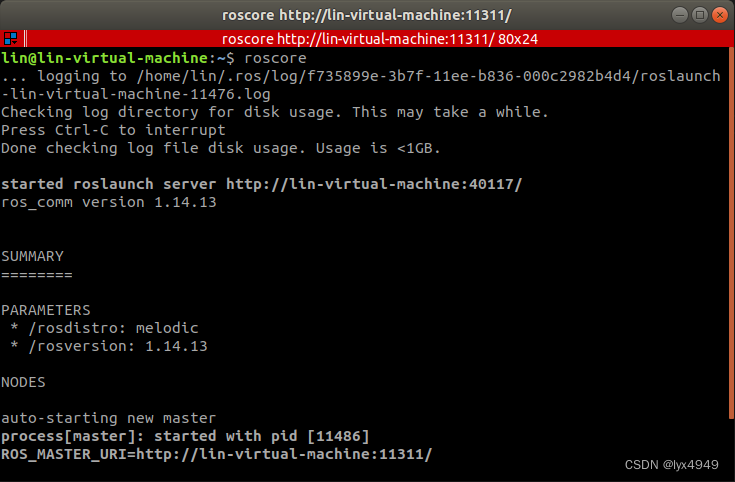
1.首先启动ros内核:
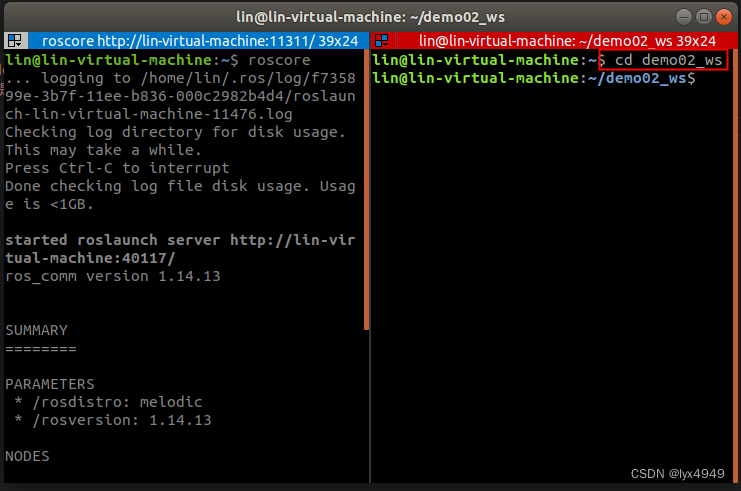
2.垂直分屏,然后cd进入demo02_ws工作空间
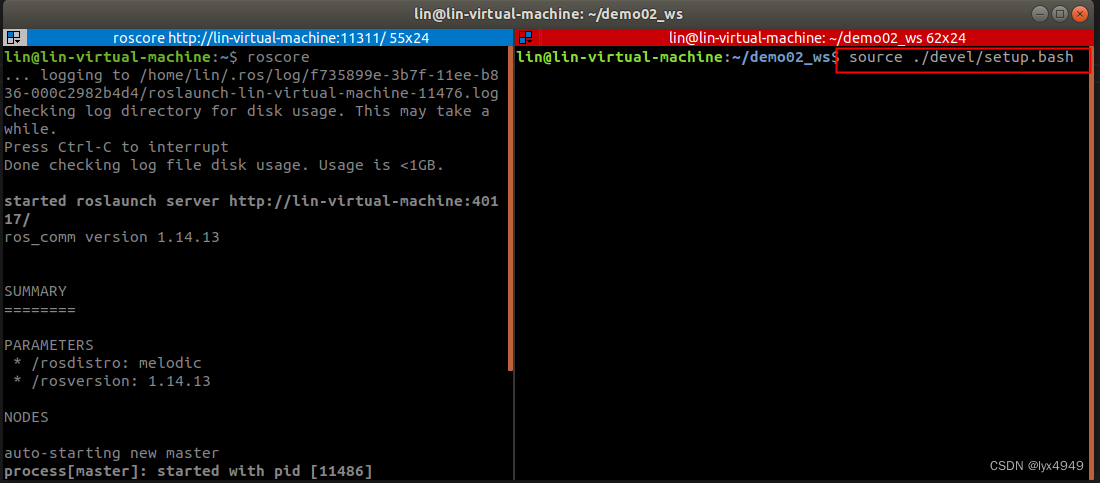
3.source一下,回车
4.rosrun运行python程序
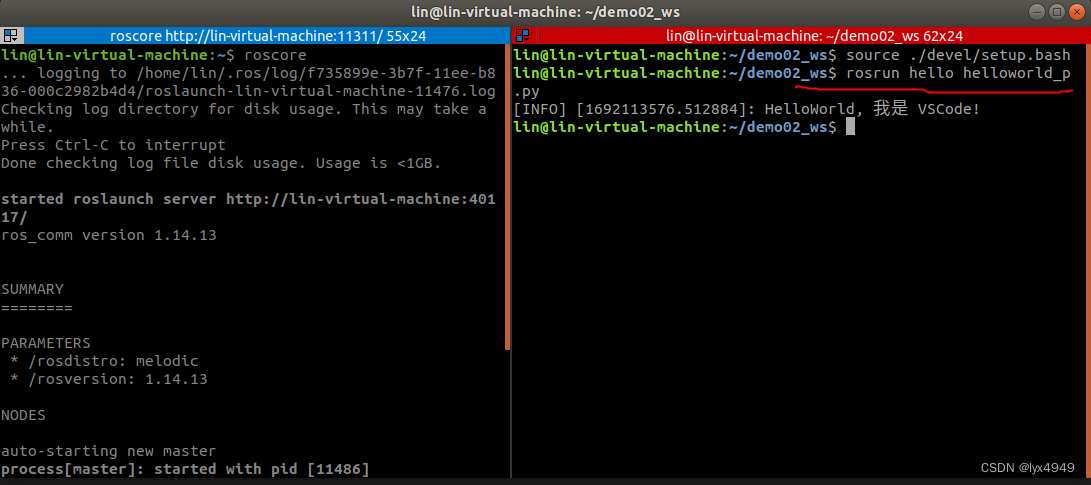
当然由于上述程序是比较简单的打印输出,并不需要太多的终端,等待后续节点一多,就能体现
Terminator分屏终端的妙用啦!