YOLOv5基础知识入门(5)— 损失函数(IoU、GIoU、DIoU、CIoU和EIoU)

前言:Hello大家好,我是小哥谈。使用YOLOv5训练模型阶段,需要用到损失函数。损失函数是用来衡量模型预测值和真实值不一样的程度,极大程度上决定了模型的性能。本节就给大家介绍IoU系列损失函数,希望大家学习之后能够有所收获!🌈
![]() 前期回顾:
前期回顾:
YOLOv5基础知识入门(1)— YOLO算法的发展历程
YOLOv5基础知识入门(2)— YOLOv5核心基础知识讲解
YOLOv5基础知识入门(3)— 目标检测相关知识点
YOLOv5基础知识入门(4)— 神经网络的基本概念与原理
目录
🚀1.损失函数简介
🚀2.IoU
🚀3.GIoU
🚀4.DIoU
🚀5.CIoU
🚀6.EIoU
🚀7.总结

🚀1.损失函数简介
损失函数(loss function)是用于衡量模型预测结果与真实结果之间的差距。损失函数通常是一标量函数,其值越小表示模型的预测结果越接近真实结果,反之则表示预测结果与真实结果之间的差距越大。🎈
使用YOLOv5训练模型的时候,我们需要不断地调整模型的参数,使得模型的预测结果和真实结果之间的差距最小化,损失函数在这个过程中起到了关键的作用。它可以帮助我们衡量模型的预测结果与真实结果之间的差距,并将这个差距转化为一个标量值。我们可以使用这个标量值来评估模型的性能,并根据这个标量值来调整模型的参数。🍓
YOLOv5损失函数包括:
- classification loss,分类损失
- localization loss,定位损失(预测边界框与GT之间的误差)
- confidence loss,置信度损失(框的目标性;objectness of the box)
总体损失函数:Loss = a*classification loss + b*localization loss + c*confidence los
也即总体损失函数为三个损失函数的加权和,通常置信度损失函数取最大权重,矩形框损失函数和分类损失的权重次之。🌷
🚀2.IoU
IoU(Intersection over Union),为两个方框相交区域面积与相并区域面积的比值,所以也称为交并比。❤️

🍀计算公式:

🍀不足之处:
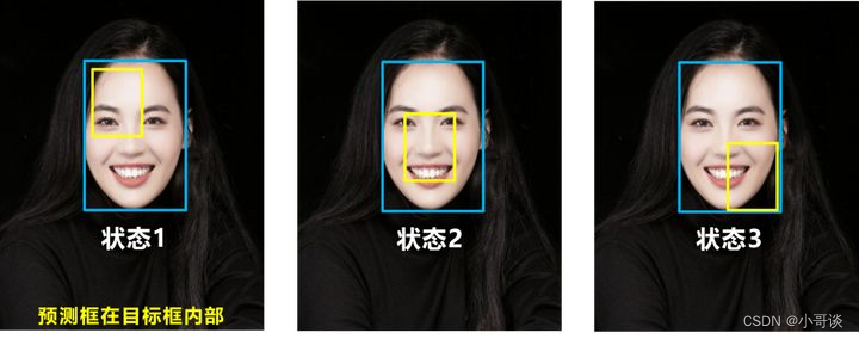
具体如下图所示:👇
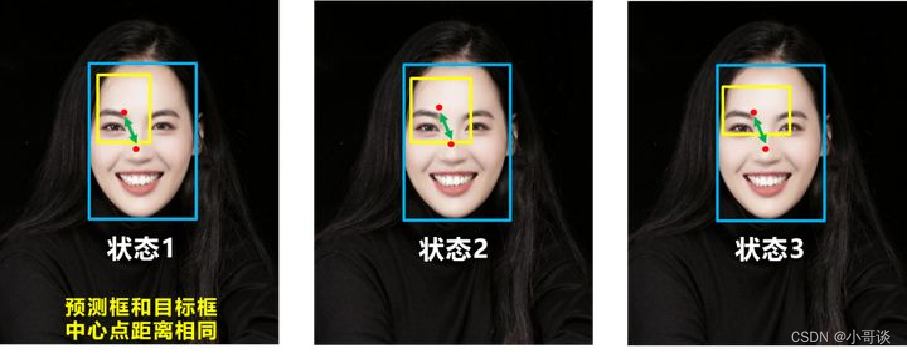
(1)即状态1的情况,当预测框和目标框不相交时,IOU=0,无法反应两个框距离的远近,此时损失函数不可导,IOU_Loss无法优化两个框不相交的情况。 🍬
(2)即状态2和状态3的情况,当两个预测框大小相同,两个IOU也相同,IOU_Loss无法区分两者相交情况的不同。因此2019年出现了GIOU_Loss来进行改进。 🍬

🍀Pytorch代码:
def IoU(box1, box2):b1_x1, b1_y1, b1_x2, b1_y2 = box1b2_x1, b2_y1, b2_x2, b2_y2 = box2xx1 = np.maximum(b1_x1, b2_x1)yy1 = np.maximum(b1_y1, b2_y1)xx2 = np.minimum(b1_x2, b2_x2)yy2 = np.minimum(b1_y2, b2_y2)w = np.maximum(0.0, yy2 - yy1)h = np.maximum(0.0, xx2 - xx1)inter = w * hIoU = inter/((b1_x2-b1_x1)*(b1_y2-b1_y1) + (b2_x2-b2_x1)*(b2_y2-b2_y1) - inter)print("IoU: ", IoU)if __name__ == "__main__":box1 = np.array([100, 100, 210, 210])box2 = np.array([150, 150, 230, 220])IoU(box1, box2)🚀3.GIoU
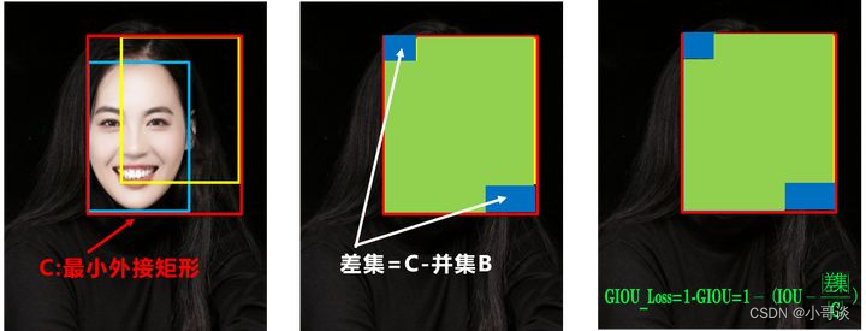
GIOU(Generalized-IoU),GIoU比IoU多了一个“Generalized”,能在更广义的层面上计算IoU。当检测框和真实框没有出现重叠的时候IoU的loss都是一样的,因此GIoU就引入了最小封闭形状C(C可以把A,B包含在内),在不重叠情况下能让预测框尽可能朝着真实框前进,这样就可以解决检测框和真实框没有重叠的问题 。🍁
🍀计算公式:
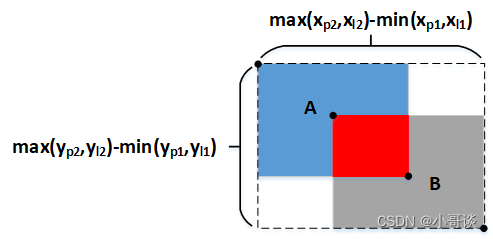
如上图所示,GIOU在IOU的基础上,把包围矩形框A和矩形框B的最小矩形框(图中的虚线框)的面积也加入到计算中。🔖
GIOU可按下式计算,其中S1为A、B相交部分的面积(红色区域)。其中S3为包围A、B的最小矩形框的面积,S2为A、B相并区域的面积(蓝色+红色+灰色区域)。🗼

由上式可知GIOU相比IOU,新增了(S3-S2)/S3这一项。新增项表示什么意义呢?❓❓❓
由上述可知S3-S2为虚线框中白色区域的面积,也即虚线框中不属于A也不属于B的空白区域,那么(S3-S2)/S3就是空白区域面积占虚线框面积的比例,这个比例越大说明A、B距离越远、重叠度越小,反之则A、B距离越近、重叠度越大。📬
GIOU的取值范围是-1~1,当A、B完全没有重叠区域时IOU为0,那么GIOU取负值,极端情况,当A、B无重叠区域且距离无限远时,此时(S3-S2)/S3等于1,那么GIOU取-1;另一个极端情况,当A、B完全重叠时(S3-S2)/S3等于0,IOU为1,那么GIOU取1。🌻
因此,GIOU解决了当A、B完全没有重叠区域时IOU恒为0的问题。
最后得到GIOU loss的计算公式:
![]()
🍀不足之处:
状态1、2、3都是预测框在目标框内部且预测框大小一致的情况,这时预测框和目标框的差集都是相同的,因此这三种状态的GIOU值也都是相同的,这时GIOU退化成了IOU,无法区分相对位置关系。 基于这个问题,2020年的AAAI又提出了DIOU_Loss。
🍀Pytorch代码:
def GIoU(box1, box2):b1_x1, b1_y1, b1_x2, b1_y2 = box1b2_x1, b2_y1, b2_x2, b2_y2 = box2# IOUxx1 = np.maximum(b1_x1, b2_x1)yy1 = np.maximum(b1_y1, b2_y1)xx2 = np.minimum(b1_x2, b2_x2)yy2 = np.minimum(b1_y2, b2_y2)inter_w = np.maximum(0.0, yy2 - yy1)inter_h = np.maximum(0.0, xx2 - xx1)inter = inter_w * inter_hUnion = (b1_x2-b1_x1)*(b1_y2-b1_y1) + (b2_x2-b2_x1)*(b2_y2-b2_y1) - inter# GIOUC_xx1 = np.minimum(b1_x1, b2_x1)C_yy1 = np.minimum(b1_y1, b2_y1)C_xx2 = np.maximum(b1_x2, b2_x2)C_yy2 = np.maximum(b1_y2, b2_y2)C_area = (C_xx2 - C_xx1) * (C_yy2 - C_yy1)IOU = inter / UnionGIOU = IOU - abs((C_area-Union)/C_area)print("GIOU:", GIOU)if __name__ == "__main__":box1 = np.array([100, 100, 210, 210])box2 = np.array([150, 150, 230, 220])GIoU(box1, box2)🚀4.DIoU
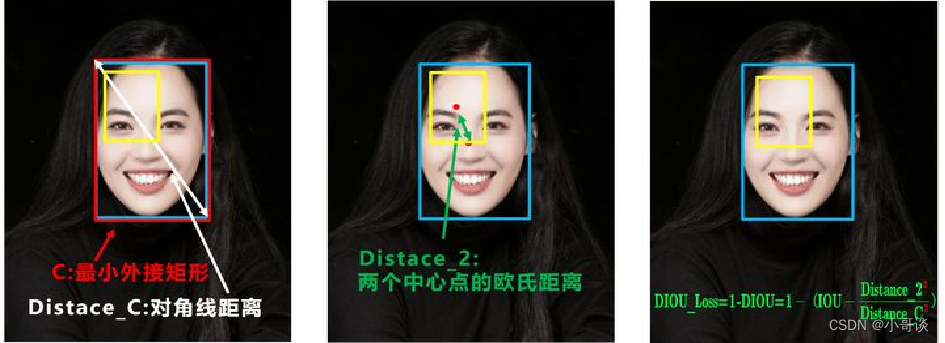
DIoU(Distance-IoU),考虑到GIoU的缺点,也是增加了C检测框,将真实框和预测框都包含了进来,但是DIoU计算的不是框之间的交并,而是计算的每个检测框之间的欧氏距离。DIoU要比GIou更加符合目标框回归的机制,将目标与anchor之间的距离,重叠率以及尺度都考虑进去,使得目标框回归变得更加稳定,不会像IoU和GIoU一样出现训练过程中发散等问题。🌳
🍀计算公式:
DIOU把矩形框A、B的中心点距离ρ、外接矩形框(虚线框)的对角线长度c都直接考虑进去,如下图所示:👇

DIOU可按下式计算:

由上式可知DIOU的取值范围也为-1~1,当两个框A、B完全重合时DIOU取1,当A、B距离无限远时,DIOU取-1。
从而得到DIOU loss的计算公式:
![]()
🍀不足之处:
DIoU考虑了重叠面积和中心点距离,当目标框包裹预测框的时候,直接度量2个框的距离,因此DIoU收敛的更快,但并没有考虑到长宽比。💞
🍀Pytorch代码:
def DIoU(box1, box2):b1_x1, b1_y1, b1_x2, b1_y2 = box1b2_x1, b2_y1, b2_x2, b2_y2 = box2# IOUxx1 = np.maximum(b1_x1, b2_x1)yy1 = np.maximum(b1_y1, b2_y1)xx2 = np.minimum(b1_x2, b2_x2)yy2 = np.minimum(b1_y2, b2_y2)inter_w = np.maximum(0.0, xx2 - xx1)inter_h = np.maximum(0.0, yy2 - yy1)inter = inter_w * inter_hUnion = (b1_x2 - b1_x1)*(b1_y2 - b1_y1) + (b2_x2 - b2_x1)*(b2_y2 - b2_y1) - inter# DISTANCEC_xx1 = np.minimum(b1_x1, b2_x1)C_yy1 = np.minimum(b1_y1, b2_y1)C_xx2 = np.maximum(b1_x2, b2_x2)C_yy2 = np.maximum(b1_y2, b2_y2)C_area = (C_xx2 - C_xx1) * (C_yy2 - C_yy1)center_b_x = (b1_x1+b1_x2)/2center_b_y = (b1_y1+b1_y2)/2center_gtb_x = (b2_x1+b2_x2)/2center_gtb_y = (b2_y1+b2_y2)/2center_distance = (center_gtb_x-center_b_x)**2 + (center_gtb_y-center_b_y)**2c_distance = (C_xx2 - C_xx1)**2 + (C_yy2 - C_yy1)**2IOU = inter/UnionDIOU = IOU - center_distance /c_distanceprint("DIOU:", DIOU)if __name__ == "__main__":box1 = np.array([100, 100, 210, 210])box2 = np.array([150, 150, 230, 220])DIoU(box1, box2)🚀5.CIoU
CIoU(Complete-IoU),就是在DIoU的基础上增加了检测框尺度的loss,增加了长和宽的loss,使得目标框回归更加稳定,不会像IoU和GIoU一样出现训练过程中发散等问题。💞
🍀计算公式:
CIOU Loss 和 DIOU Loss 前面的公式都是一样的,不过在此基础上还增加了一个影响因子,这样CIOU_Loss就将目标框回归函数应该考虑三个重要几何因素:重叠面积、中心点距离,长宽比全都考虑进去了。🐳

由以上可得CIOU loss的计算公式为:
![]()
🍀不足之处:
(1)如果预测框和ground truth框的长宽比是相同的,那么长宽比的惩罚项恒为0,不合理。
(2)观察CIoU中w, h相对于v的梯度,发现这两个梯度是一对相反数,也就是说,w和h不能同时增大或减小,这显然也不够合理的。
🍀Pytorch代码:
def CIoU(box1, box2):b1_x1, b1_y1, b1_x2, b1_y2 = box1b2_x1, b2_y1, b2_x2, b2_y2 = box2# IOUxx1 = np.maximum(b1_x1, b2_x1)yy1 = np.maximum(b1_y1, b2_y1)xx2 = np.minimum(b1_x2, b2_x2)yy2 = np.minimum(b1_y2, b2_y2)inter_w = np.maximum(0.0, xx2 - xx1)inter_h = np.maximum(0.0, yy2 - yy1)inter = inter_w*inter_hUnion = (b1_x2-b1_x1)*(b1_y2-b1_y1) + (b2_x2-b2_x1)*(b2_y2-b2_y1) - interIOU = inter/UnionC_xx1 = np.minimum(b1_x1, b2_x1)C_yy1 = np.minimum(b1_y1, b2_y1)C_xx2 = np.maximum(b1_x2, b2_x2)C_yy2 = np.maximum(b1_y2, b2_y2)# DISTANCEcenter_b_x = (b1_x1 + b1_x2)/2center_b_y = (b1_y1 + b1_y2)/2center_gtb_x = (b2_x1 + b2_x2)/2center_gtb_y = (b2_y1 + b2_y2)/2C_area = (C_xx2-C_xx1)*(C_yy2-C_yy1)Distance = (center_gtb_x-center_b_x)**2 + (center_gtb_y-center_b_y)**2Distance_area = Distance/C_area**2# aspect ratiopred_w = b1_y2 - b1_y1pred_h = b1_x2 - b1_x1gt_w = b2_y2 - b2_y1gt_h = b2_x2 - b2_x1v = (4/(np.pi)**2)*(np.arctan(gt_w/gt_h) - np.arctan(pred_w/pred_h))**2alpha = v/((1-IOU) + v)CIOU = IOU - Distance_area - alpha*vprint("CIOU:", CIOU)if __name__ == "__main__":box1 = np.array([100, 100, 210, 210])box2 = np.array([150, 150, 230, 220])CIoU(box1, box2)🚀6.EIoU
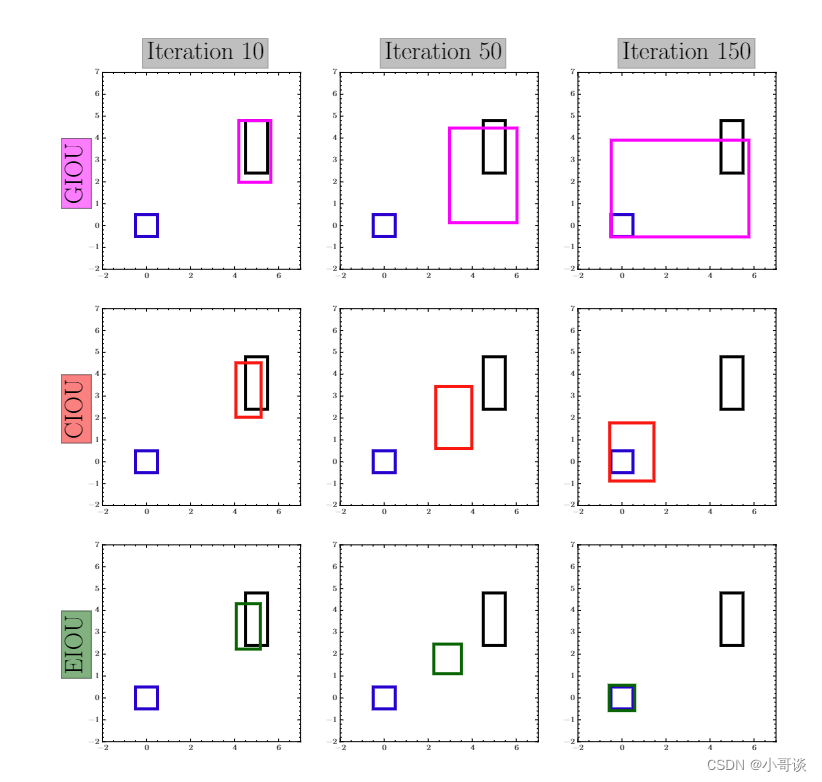
EIOU 是在 CIOU 的惩罚项基础上将预测框和真实框的纵横比的影响因子拆开,分别计算预测框和真实框的长和宽,来解决 CIOU 存在的问题。🌾
EIoU包括三个部分:IoU损失、距离损失、高宽损失(重叠面积、中心点举例、高宽比)。高宽损失直接最小化了预测目标边界框和真实边界框的高度和宽度的差异,使其有更快的收敛速度和更好的定位结果。🌾
🍀计算公式:

其中,wc和hc是预测边界框与真实边界框的最小外接矩形的宽度和高度。p是两点之间的欧氏距离。 🌴
🍀Pytorch代码:
def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, EIoU=False, eps=1e-7):# Returns the IoU of box1 to box2. box1 is 4, box2 is nx4box2 = box2.T# Get the coordinates of bounding boxesif x1y1x2y2: # x1, y1, x2, y2 = box1b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]else: # transform from xywh to xyxyb1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2# Intersection areainter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)# Union Areaw1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + epsw2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + epsunion = w1 * h1 + w2 * h2 - inter + epsiou = inter / unionif GIoU or DIoU or CIoU or EIoU:cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) widthch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex heightif CIoU or DIoU or EIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squaredrho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +(b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squaredif DIoU:return iou - rho2 / c2 # DIoUelif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)with torch.no_grad():alpha = v / (v - iou + (1 + eps))return iou - (rho2 / c2 + v * alpha) # CIoUelif EIoU:rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2cw2 = cw ** 2 + epsch2 = ch ** 2 + epsreturn iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2)else: # GIoU https://arxiv.org/pdf/1902.09630.pdfc_area = cw * ch + eps # convex areareturn iou - (c_area - union) / c_area # GIoUelse:return iou # IoU🚀7.总结
边界框回归的三大几何因素:重叠面积、中心点距离、纵横比。🍒🍒🍒
IOU Loss:主要考虑检测框和目标框重叠面积。
GIOU Loss:在IOU的基础上,解决边界框不相交时loss等于0的问题。
DIOU Loss:在IOU和GIOU的基础上,考虑边界框中心点距离的信息。
CIOU Loss:在DIOU的基础上,考虑边界框宽高比的尺度信息。
EIOU Loss:在CIOU的基础上,解决了纵横比的模糊定义,并添加Focal Loss解决BBox回归中的样本不平衡问题。