【工业机器人】用于轨迹规划和执行器分析的机械手和移动机器人模型(MatlabSimulink)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码、Simulink

💥1 概述
-
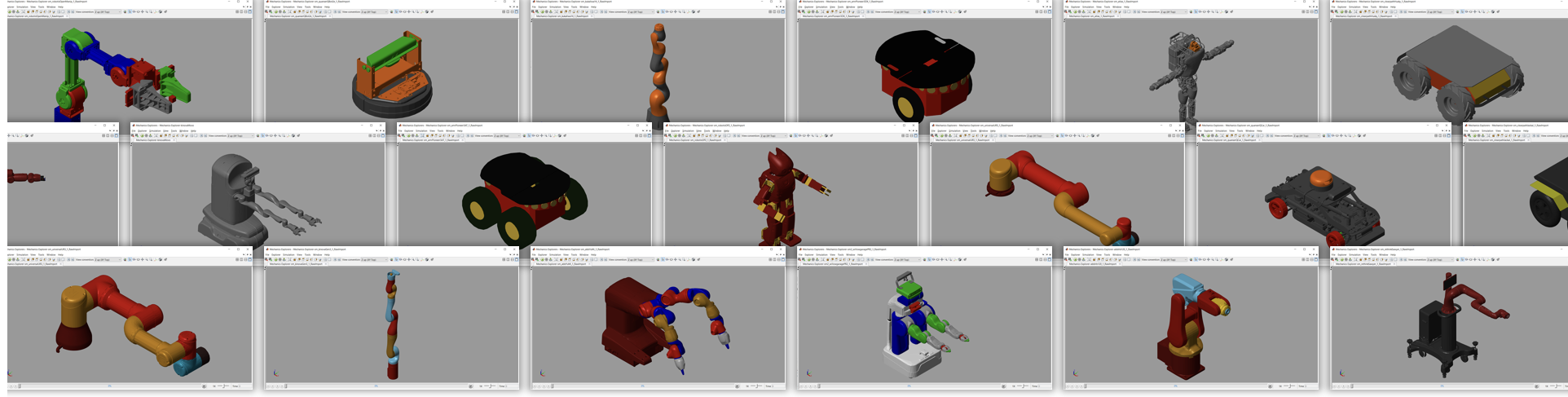
在轨迹规划和执行器分析中,机械手和移动机器人模型可以用于模拟和分析机器人的运动和控制。以下是一些常用的机械手和移动机器人模型:
-
机械手模型:
-
串联机械手模型:这种模型由多个关节连接而成,每个关节可以旋转或平移。常见的串联机械手模型包括RRR(Revolute-Revolute-Revolute)和RRP(Revolute-Revolute-Prismatic)等。
-
并联机械手模型:这种模型由多个平行连接的链条组成,每个链条由多个关节和连杆组成。并联机械手模型常用于重载和高精度应用,如Delta机器人和Stewart平台。
-
-
移动机器人模型:
-
差动驱动模型:这种模型常用于轮式移动机器人,其中每个轮子都可以独立控制。差动驱动模型可以通过控制轮子的速度和方向来实现机器人的运动和转向。
-
全向轮模型:这种模型常用于全向移动机器人,其中每个轮子都可以独立控制,并且可以在任意方向上运动。全向轮模型可以实现机器人的平移和旋转运动。
-
轨迹追踪模型:这种模型用于描述机器人在给定轨迹上的运动。轨迹追踪模型可以根据给定的轨迹和控制策略,计算机器人的运动轨迹和控制指令。
-
这些机械手和移动机器人模型可以用于轨迹规划和执行器分析中的仿真和控制算法设计。通过模拟机器人的运动和控制,可以评估和优化轨迹规划算法的性能,并分析执行器的响应和控制精度。这些模型可以在机器人仿真软件中实现,如ROS(Robot Operating System)和Gazebo等。
-
📚2 运行结果
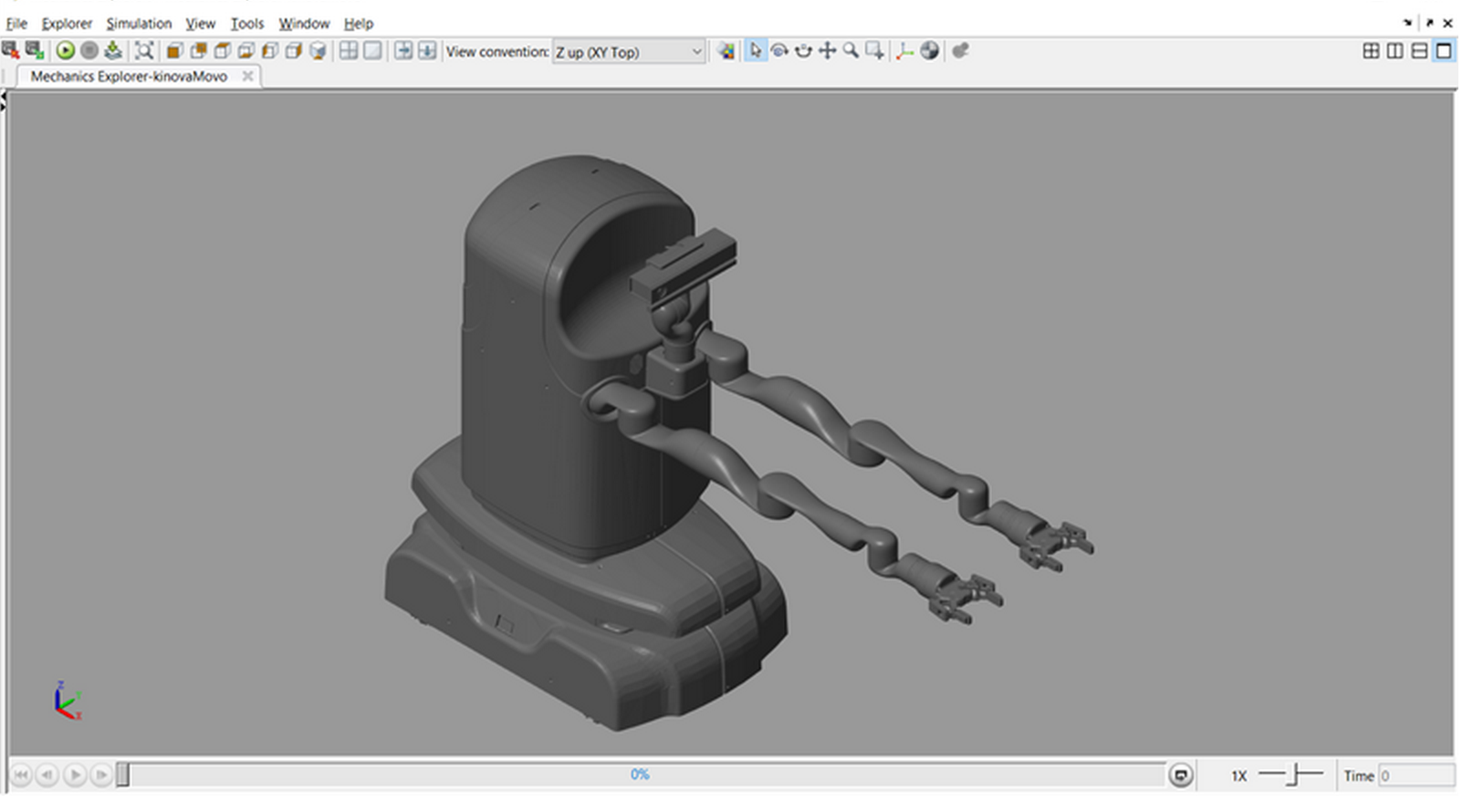
部分代码:
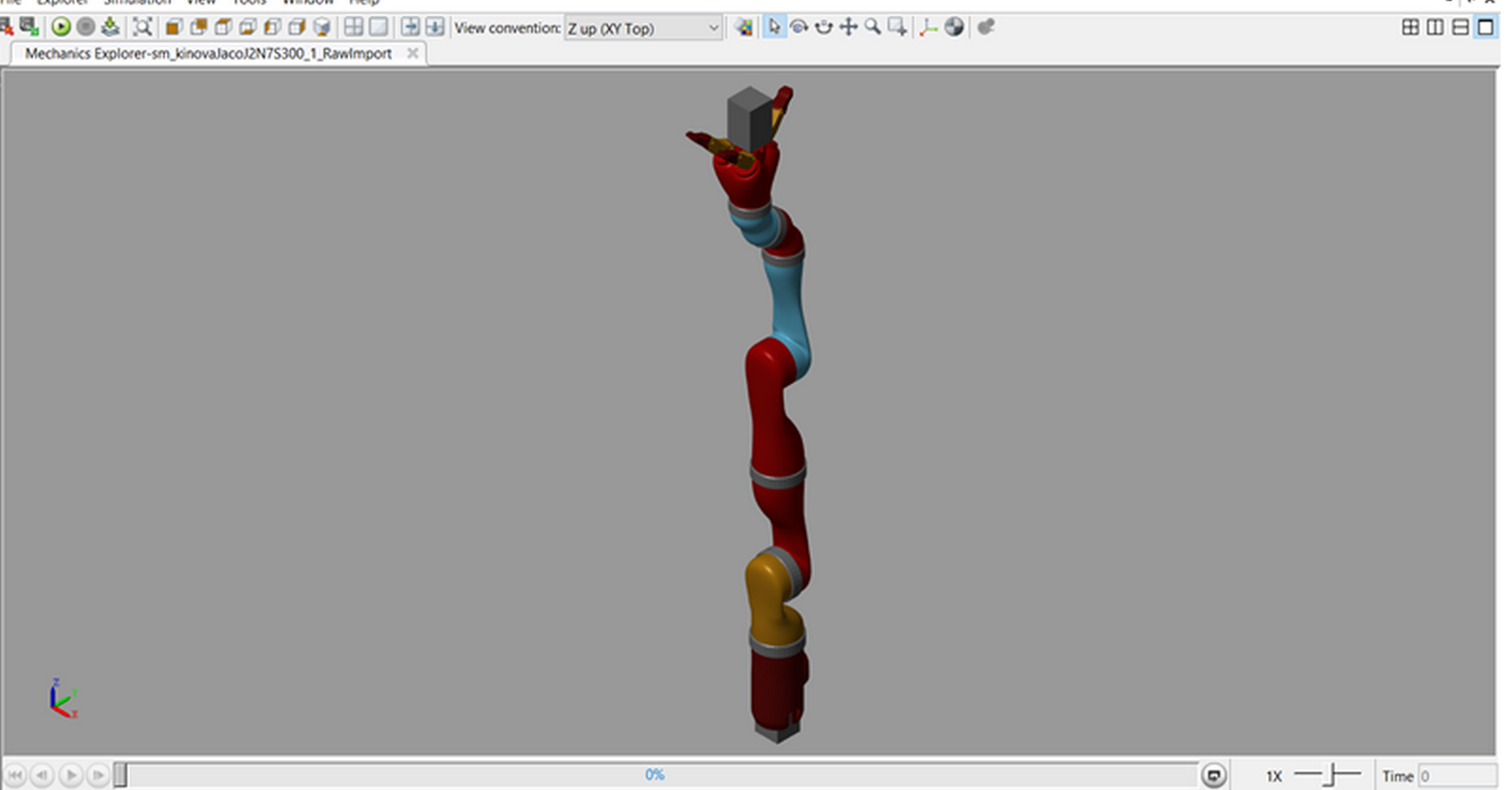
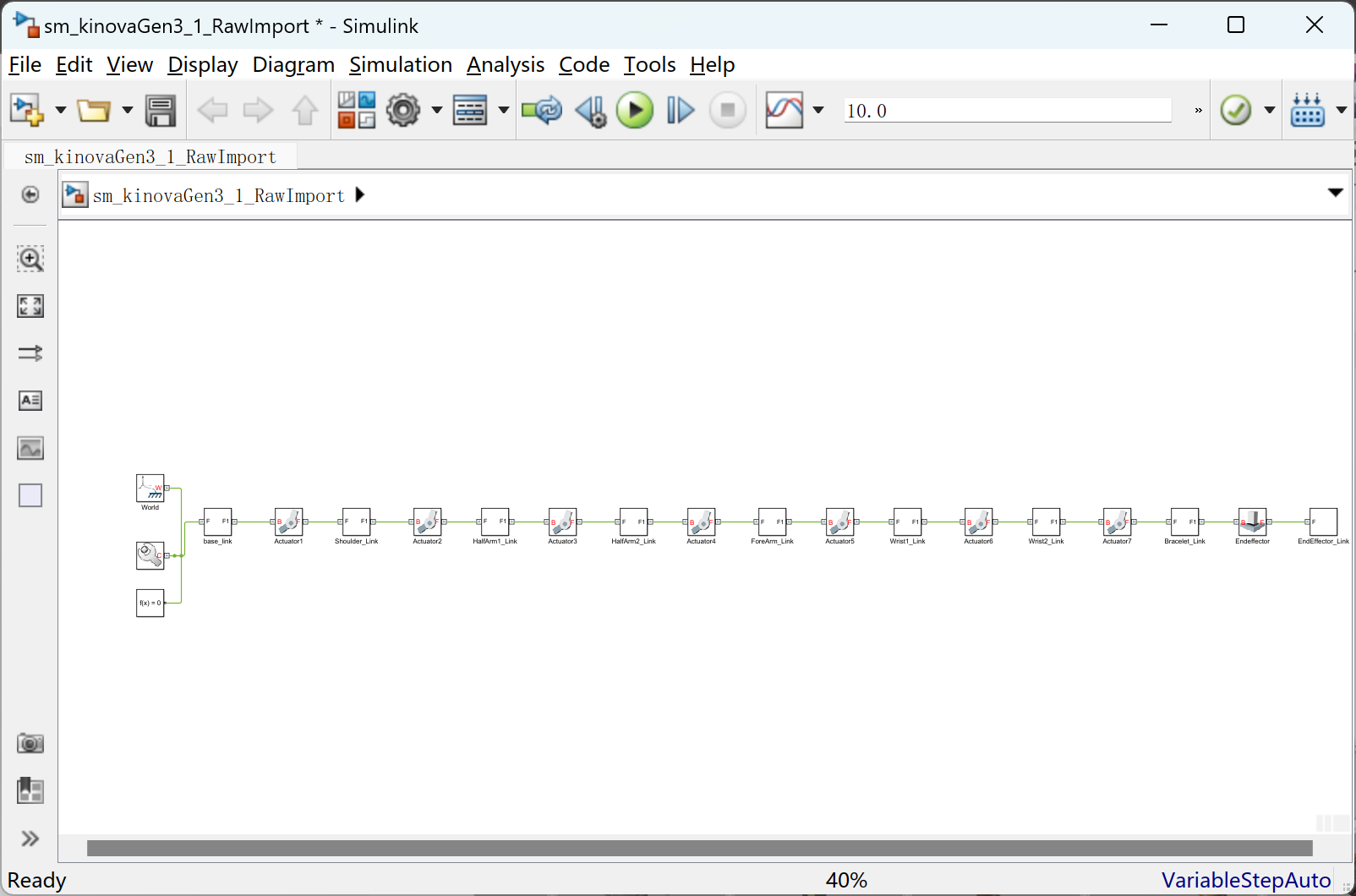
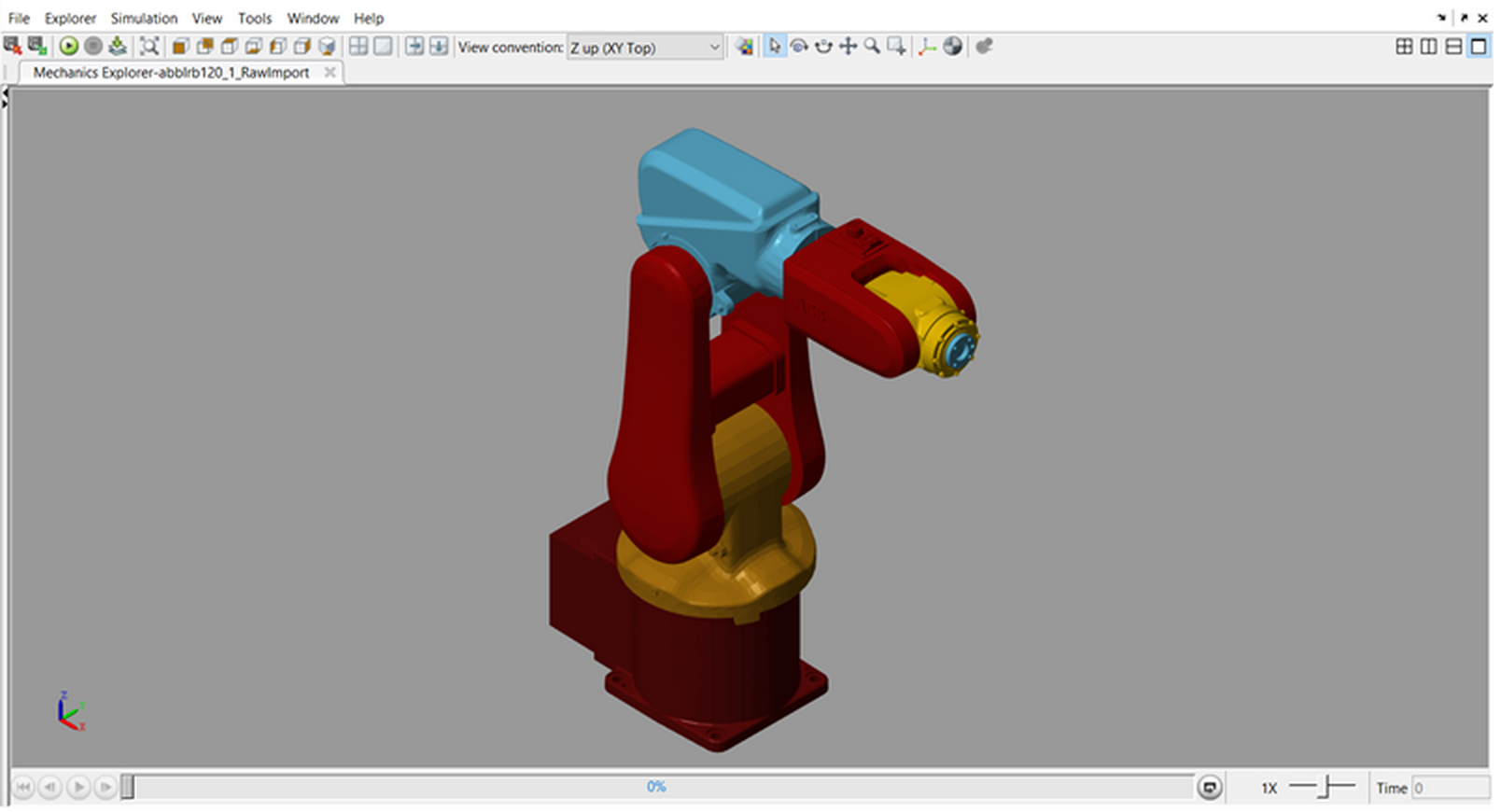
%% Import URDF file to create Simscape Multibody model
addpath([pwd filesep 'Geometry']);
[mdl_h] = smimport('sm_kinovaMicoM1N4S200.urdf','ModelName','sm_kinovaMicoM1N4S200_1_RawImport');
mdl_name = getfullname(mdl_h);
%% Update diagram, note initial robot position
set_param(mdl_h,'SimulationCommand','update')
%% Adjust joint targets for valid initial position
set_param([mdl_name '/m1n4s200_joint_2'],'PositionTargetSpecify','on','PositionTargetValue','180','PositionTargetValueUnits','deg')
set_param([mdl_name '/m1n4s200_joint_3'],'PositionTargetSpecify','on','PositionTargetValue','180','PositionTargetValueUnits','deg')
%% Update diagram, note initial robot position
set_param(mdl_h,'SimulationCommand','update')
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
-
王晓东, 张晓东, & 陈刚. (2019). 基于机械手模型的轨迹规划与执行器分析. 机器人技术与应用, 38(4), 1-8.
-
张晓东, & 陈刚. (2018). 基于移动机器人模型的轨迹规划与执行器分析. 机器人技术与应用, 37(4), 1-8.
-
陈刚, 张晓东, & 王晓东. (2017). 机械手和移动机器人模型在轨迹规划和执行器分析中的应用研究综述. 机器人技术与应用, 36(4), 1-8.