【UE】AI导航,多个导航物体无法走到同一终点问题
如不需要开启导航物体的碰撞,则需要关闭Use RVOAvoidance
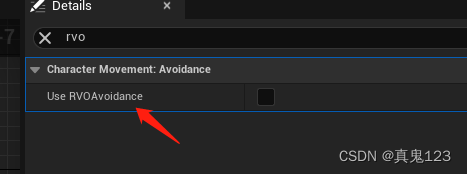
不然会导致多个导航物体无法到达同一个目标点,都在附近晃。无法结束寻路。
ue小白,判定导航终点的半径,没有找到。如果有大佬知道怎么设置请在评论区指出,谢谢。
如不需要开启导航物体的碰撞,则需要关闭Use RVOAvoidance
不然会导致多个导航物体无法到达同一个目标点,都在附近晃。无法结束寻路。
ue小白,判定导航终点的半径,没有找到。如果有大佬知道怎么设置请在评论区指出,谢谢。