无人驾驶实战-第七课(高精地图和V2X )
高精地图是无人驾驶中的重要一环,对环境感知、规划与定位等都有重要的作用。
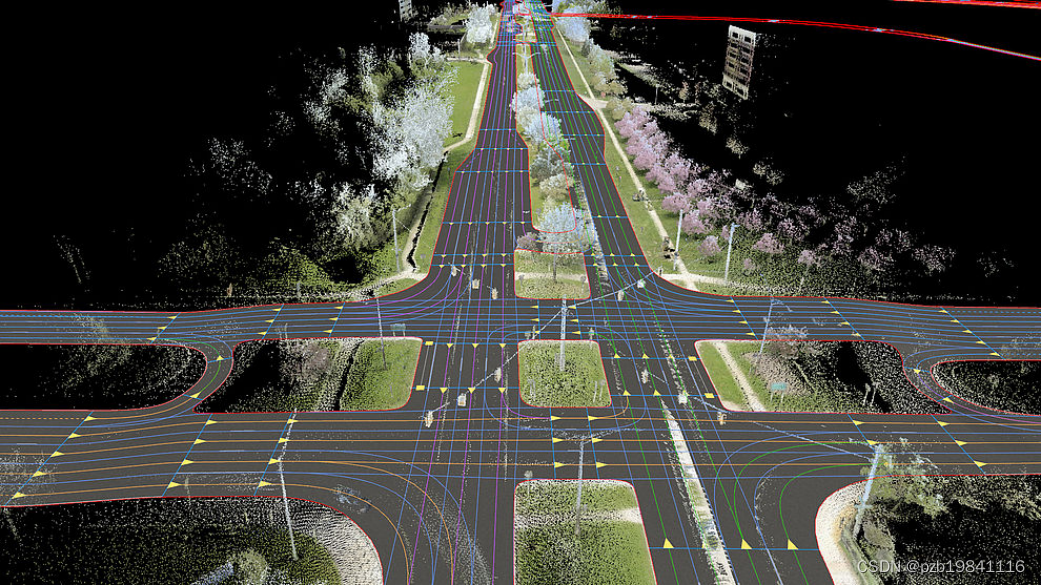
高精地图的特点:
可视化、静态目标、地图信息、点云数据
高精地图与导航地图的区别
| High Definition Map | Navigation Map | |
| Precision | cm | m |
| Information | 3D lane info More detail signals | Basic info |
| Usage | Autonomous vehicle or robotics | Human |
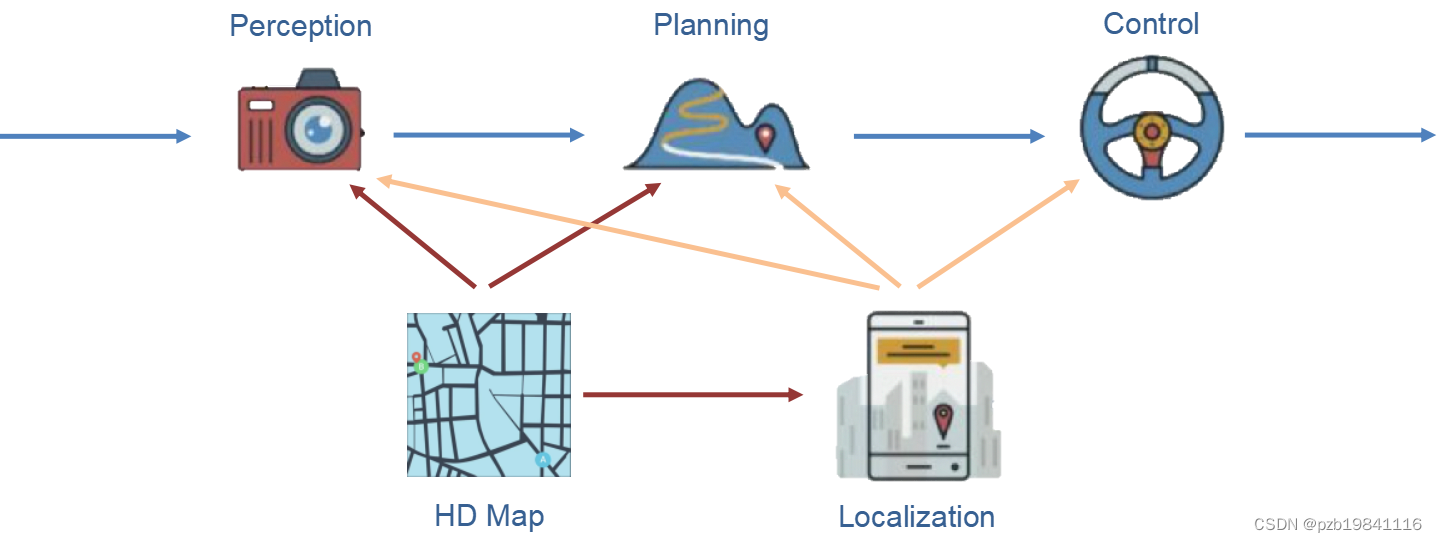
定位:
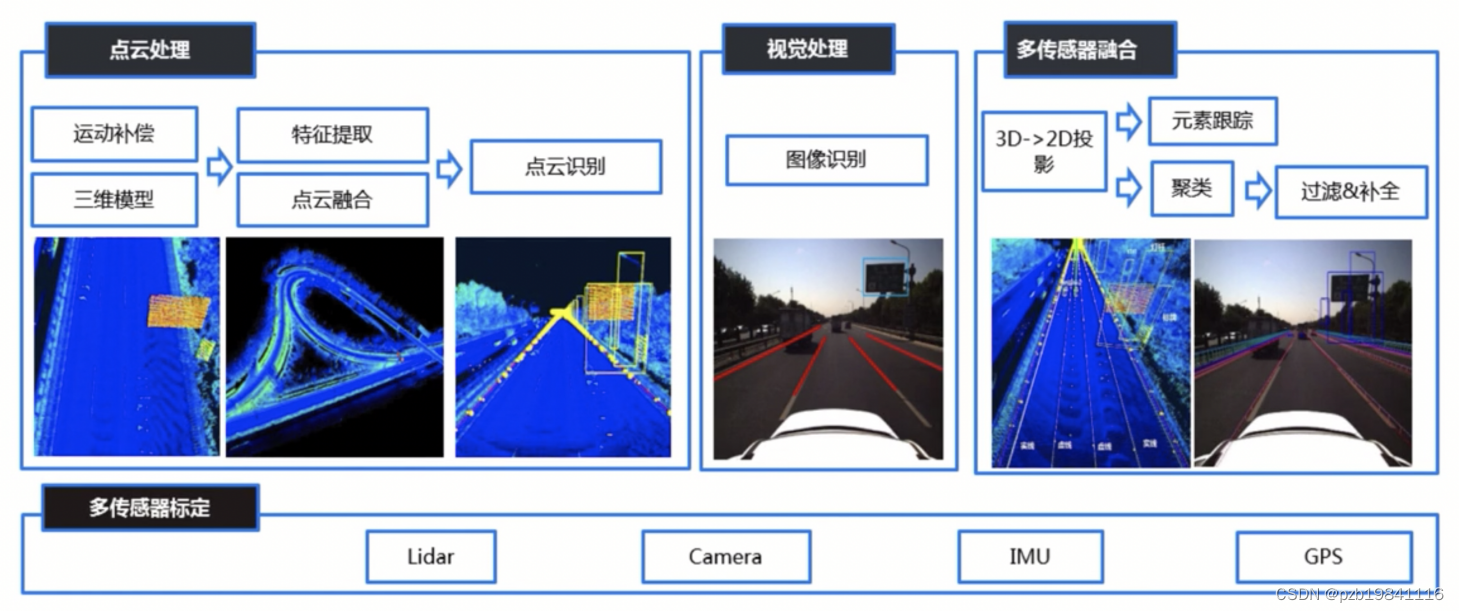
相机与激光雷达采集到的数据,通过预处理、坐标变换与融合,形成的结果可以在高精地图中定位。

感知:
利用高精地图,可以进行超视距的环境感知,还可以划定ROI,从而节省算力。
规划:
与导航地图相比,高精地图提供精准的车道中心线与边界,路网信息中也包含了车道合并与路网节点的位置,同时还标记出了停车位与限速牌等信息。
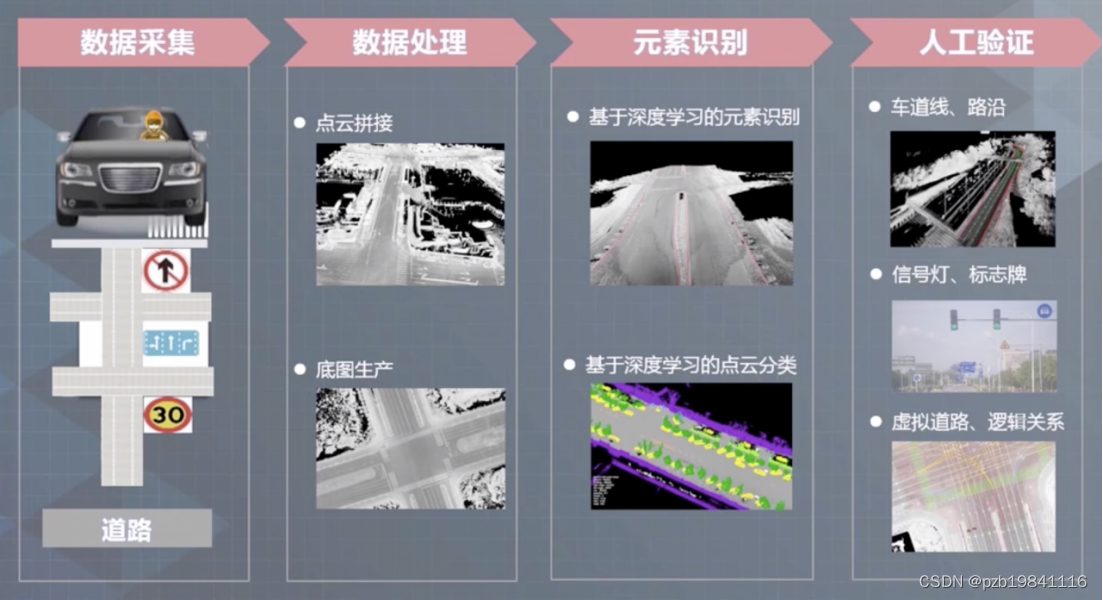
高精地图制作流程
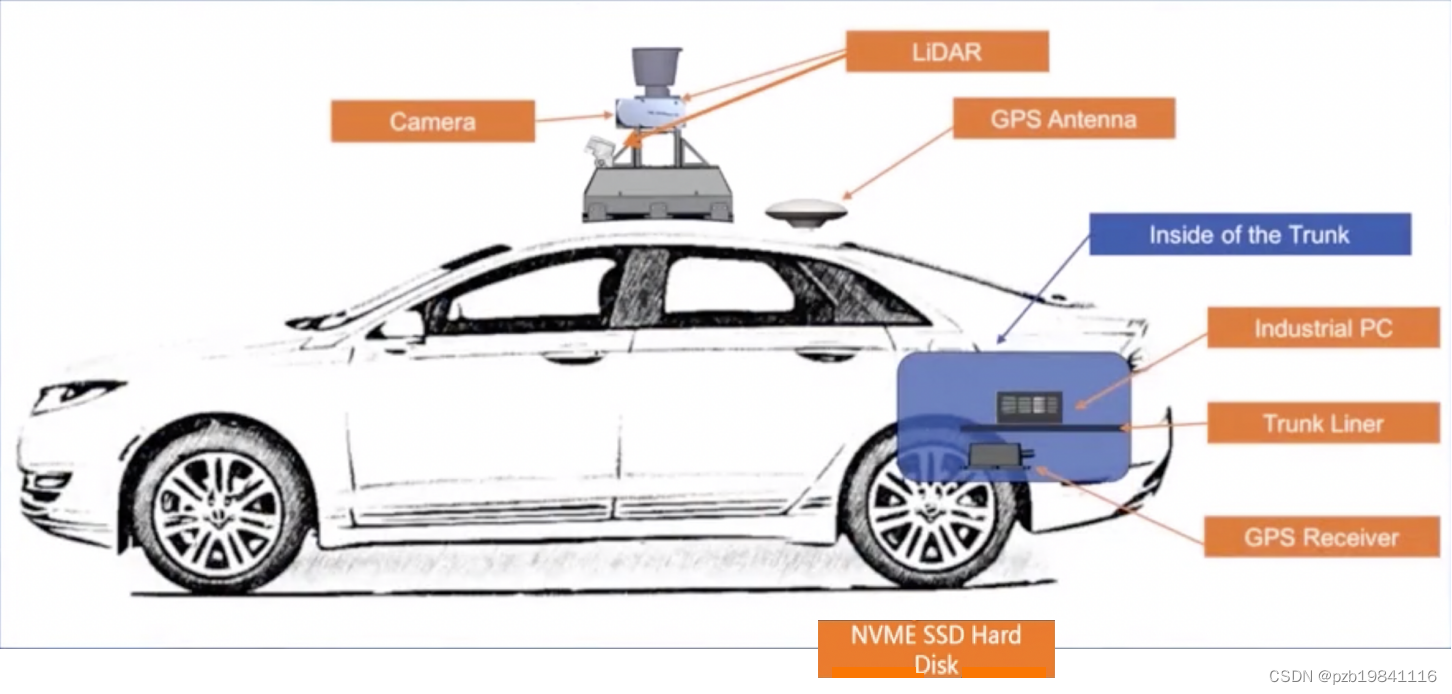
高精地图采集车配置
可以看出,GAN无人驾驶的试验车一样。
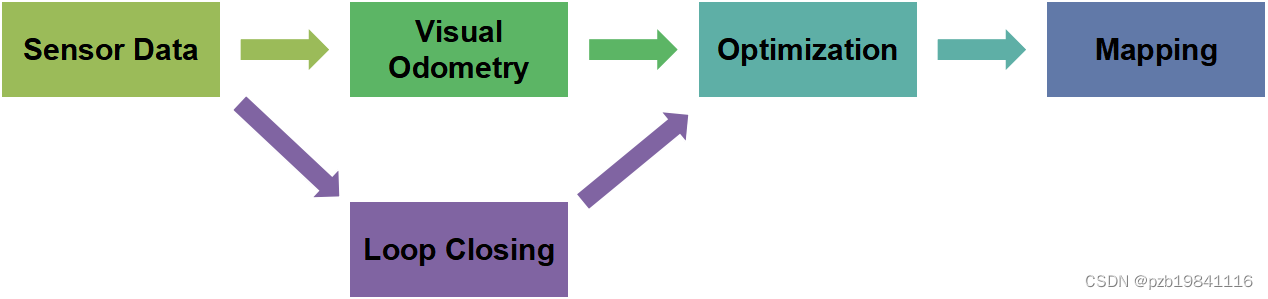
道路信息采集
整个流程跟SLAM是一样的,可以看成一个大范围的SLAM
高精地图的整体框架
OpenDriver
OpenDriver是一个描述路网信息的开放文件格式。
查看方式
对应的软件为odrViewer 64.1.9.1,是Linux下的一个工具。
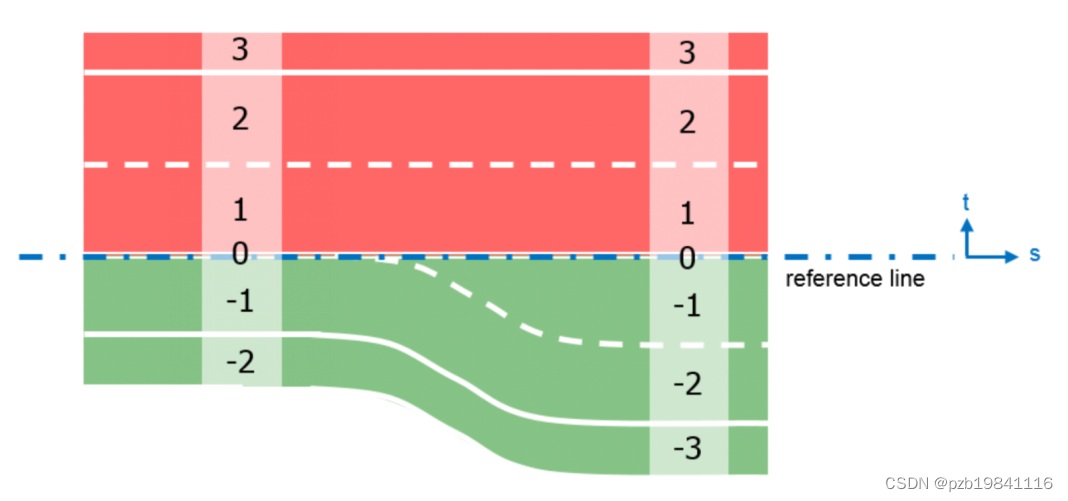
坐标
S为与原点相比的距离信息,t为与车道线中心线对比的偏差距离。
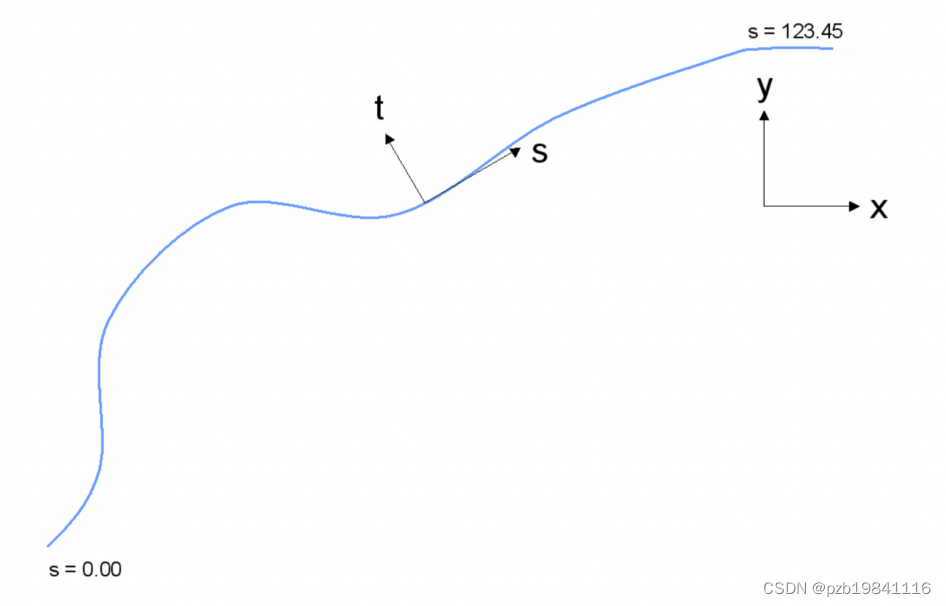
OpenDriver用的是右手坐标系
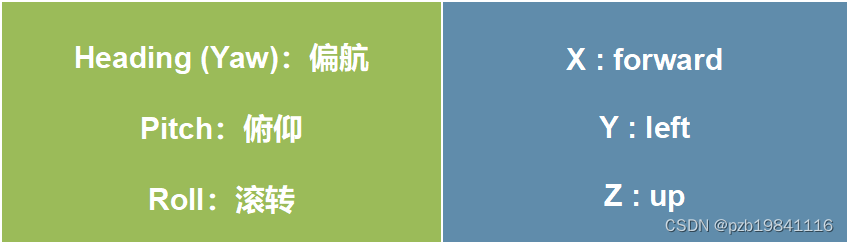
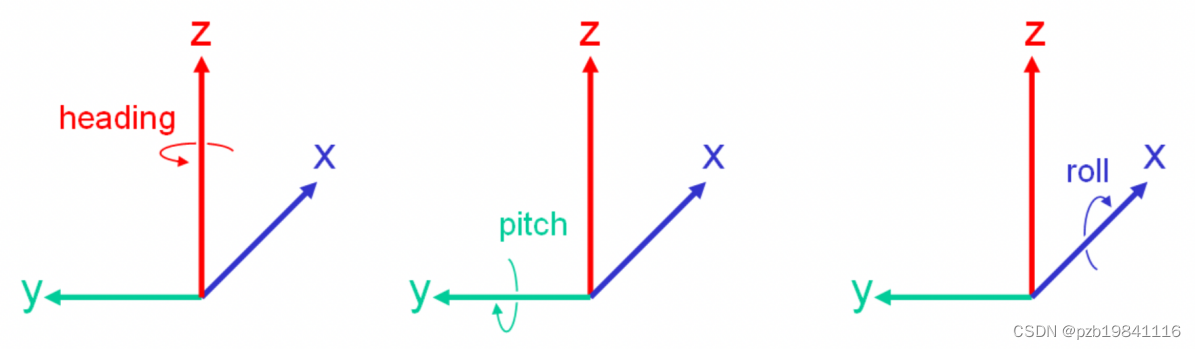
车辆在路网中的坐标分三个维度
s为与参考点相比的距离,t为与车道线中心相比偏移的距离,h为车辆的高度(因为路面不一定是水平的)

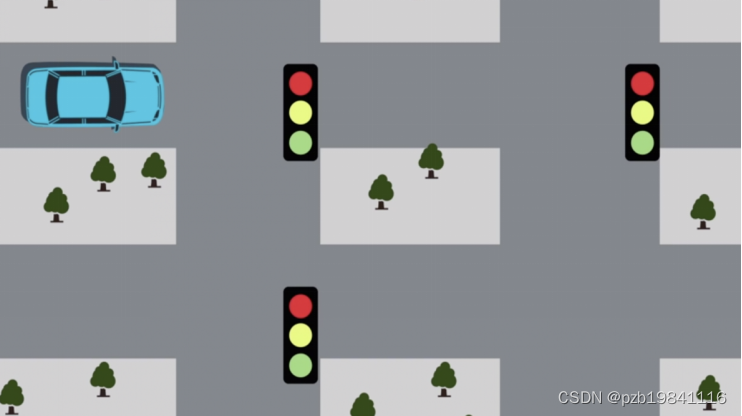
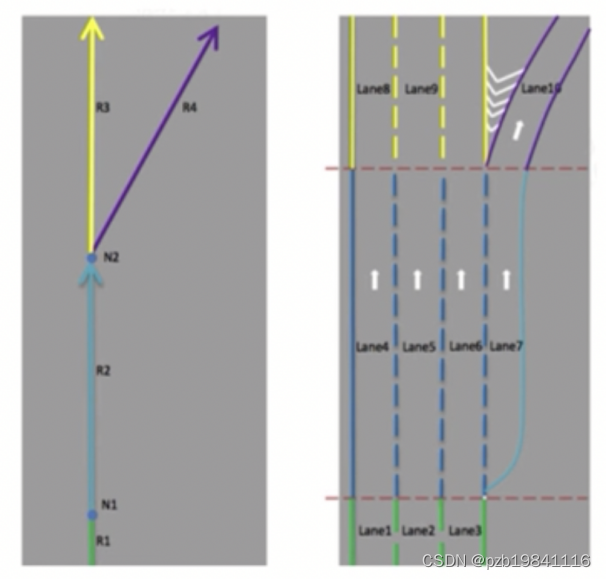
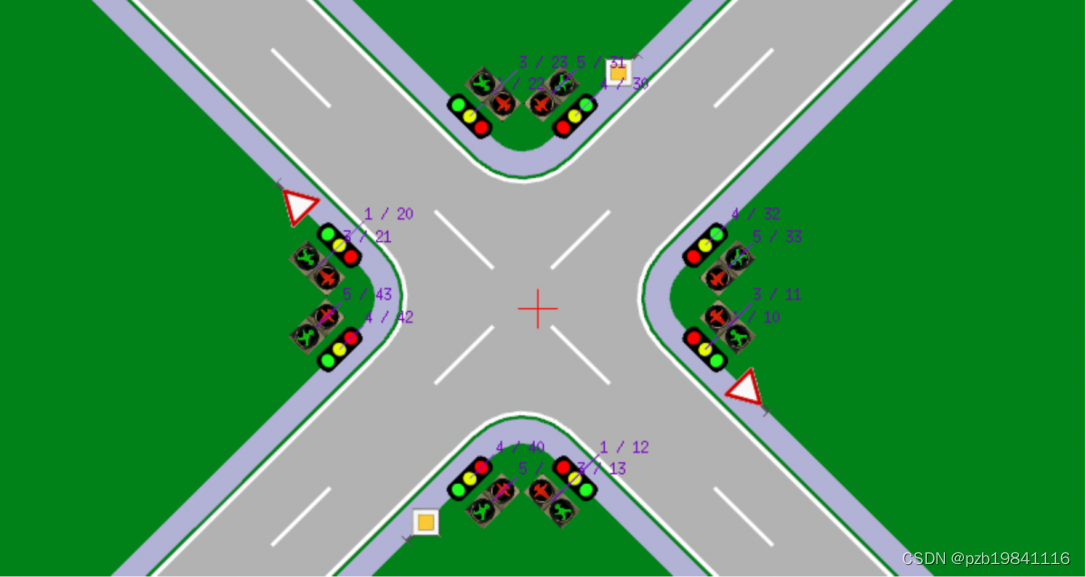
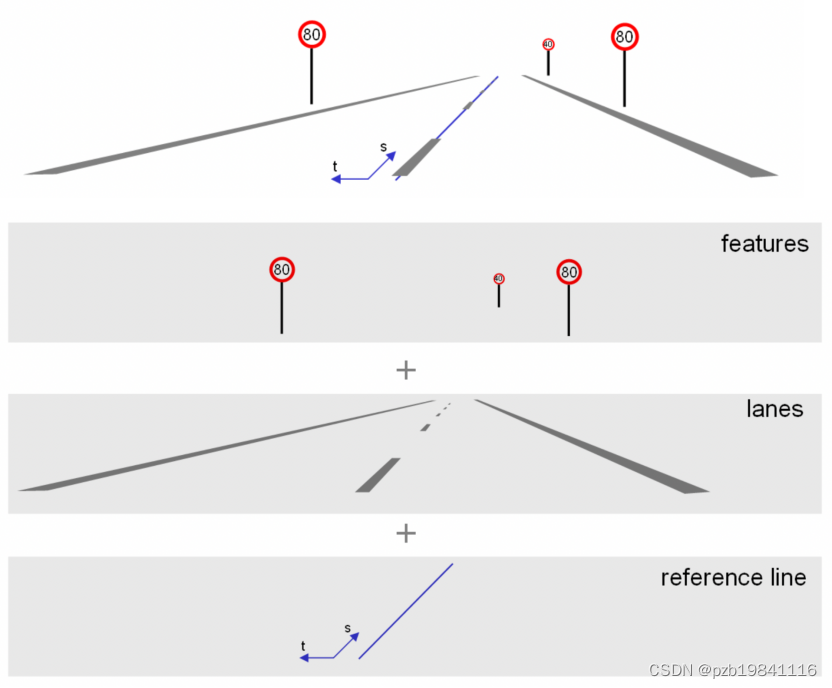
高精地图中的道路信息
包括道路上的各特征(交通信号),道路的车道线及参考线。
车道被定义为一些数字,参考线的左边为正,右边为负。
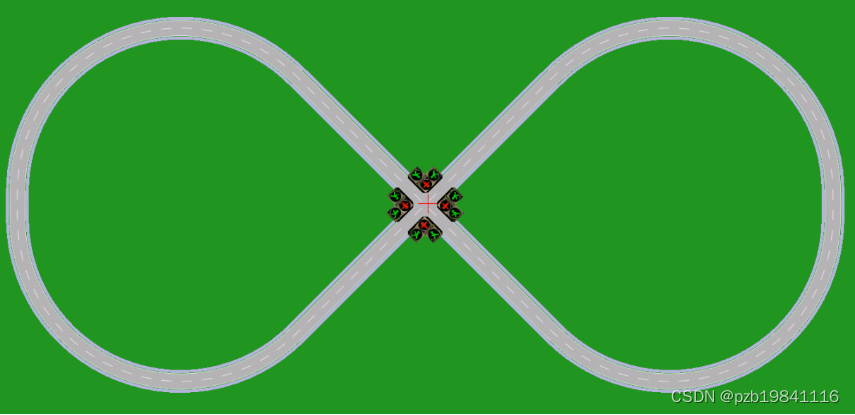
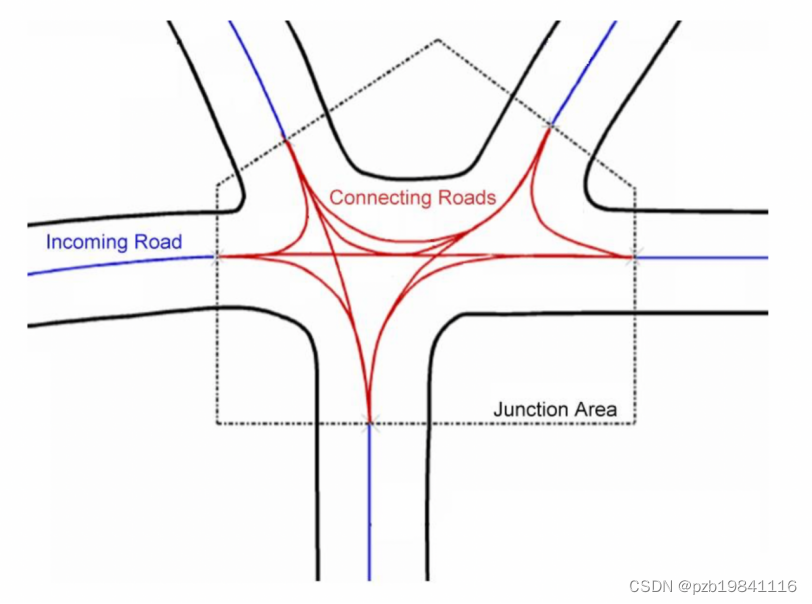
交汇处
道路的交汇处是另一个重要的信息,包含车道的虚拟连接等
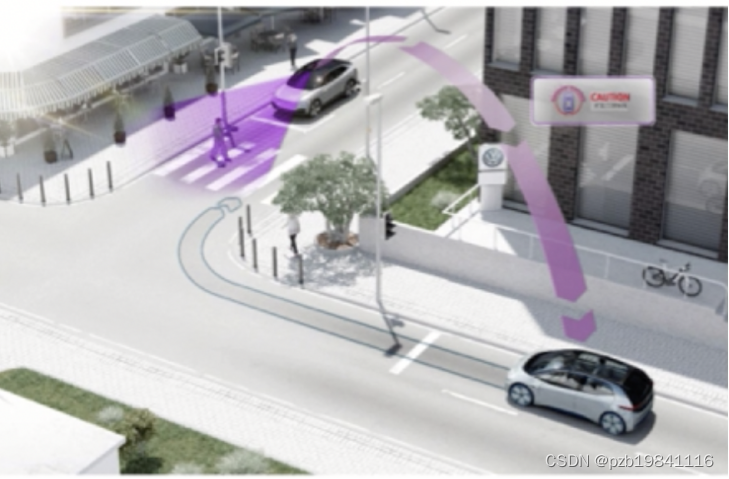
V2X
高精地图记录的是道路的静态特征,而V2X是用于获取动态特征的方法。具有低延时、高鲁棒性,动态组网及超视距的特点。
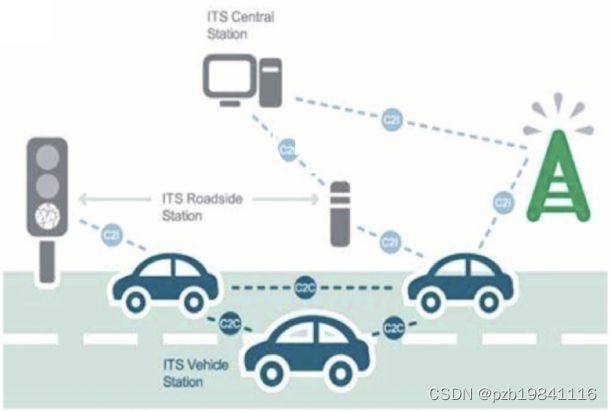
V2X的通讯协议分为两大阵营。
C-V2X (LTE-V):主要用在中国,共享站直连模式,推动厂家为华为与大唐。
DSRC (Dedicated Short Range Communication):主要用在美国与日本,WIFI通讯,5.8GHz的频率,推动厂家为索尼和AT&T。
