OpenCV中图像变换
一、介绍
transform():Transposes a matrix.
perspectiveTransform():Performs the perspective matrix transformation of vectors.
warpAffine():Applies an affine transformation to an image.
warpPerspective():Applies a perspective transformation to an image.
二、transform
Mat m23 = Mat::zeros(2, 3, CV_32FC1); // 2*2 2*3m23.at<float>(0, 0) = 1.0;m23.at<float>(0, 2) = 2.0;m23.at<float>(1, 1) = 3.0;m23.at<float>(1, 2) = 4.0;cout << "m23 = " << endl << m23 << endl;// src.channel = m.cols 或 m.cols - 1// 当src.channel=m.cols - 1时,src增加一通道,值为1Mat src = Mat::zeros(4, 4, CV_8UC3);for (int i = 0; i < src.rows; i++){for (int j = 0; j < src.cols; j++){for (int k = 0; k < src.channels(); k++){src.at<Vec3b>(i, j)[k] = 2 * i + j + k;}}}cout << "src = " << endl << src << endl;Mat dst;cv::transform(src, dst, m23); // dst.channel = m.rowscout << "dst = " << endl << dst << endl;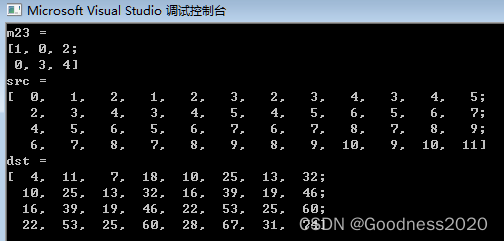
三、perspectiveTransform
Mat m33 = Mat::zeros(3, 3, CV_32FC1); // 3*3 4*4m33.at<float>(0, 0) = 1.0;m33.at<float>(0, 2) = 2.0;m33.at<float>(1, 1) = 3.0;m33.at<float>(1, 2) = 4.0;m33.at<float>(2, 2) = 2.0;cout << "m33 = " << endl << m33 << endl;// src.channel = m.cols - 1 src增加一个通道,值为1Mat src = Mat::zeros(2, 2, CV_32FC2);for (int i = 0; i < src.rows; i++){for (int j = 0; j < src.cols; j++){for (int k = 0; k < src.channels(); k++){src.at<Vec2f>(i, j)[k] = 2.0f * i + j + k;}}}cout << "src = " << endl << src << endl;// dst.size = src.size dst.channels = src.channels// 3*3 * 3*1 = 3*1 4*4 * 4*1 = 4*1 m * v1 = v2// m33 * [x,y,1] = [x',y',w], 使用[x'/w, y'/w]作为dst的结果Mat dst;cv::perspectiveTransform(src, dst, m33);cout << "dst = " << endl << dst << endl;
四、warpAffine
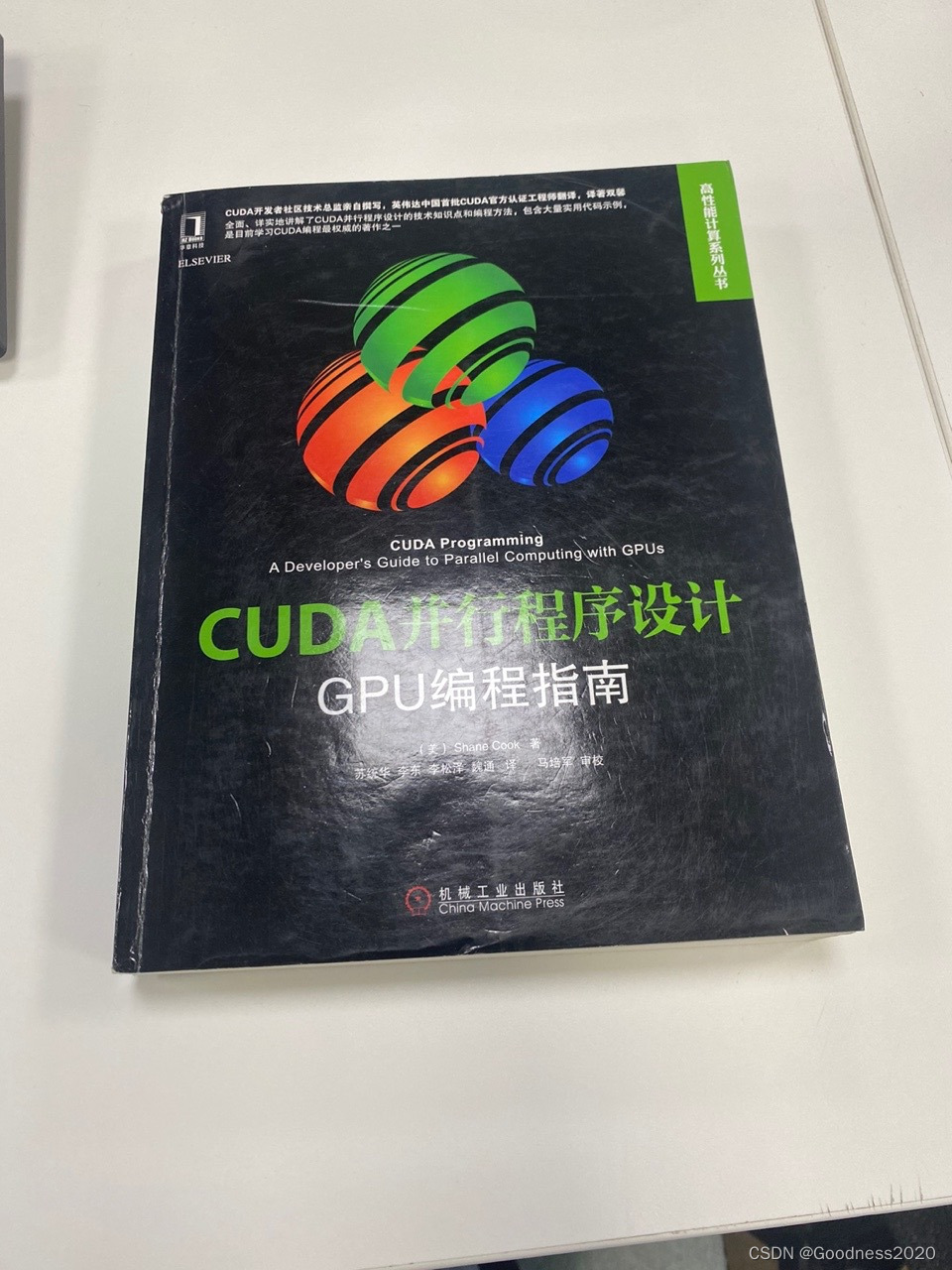
// 仿射变换矩阵 M 2*3 --- 旋转、平移、缩放cv::Point2f center = Point2f(img.cols / 2.0f, img.rows / 2.0f); // 旋转中心double angle = 10.0; // 旋转角度,逆时针为正double scale = 1.2; // 缩放尺寸Mat M = cv::getRotationMatrix2D(center, angle, scale);int bound_w = (img.rows * fabs(sin(angle * CV_PI / 180)) + img.cols * fabs(cos(angle * CV_PI / 180))) * scale;int bound_h = (img.rows * fabs(cos(angle * CV_PI / 180)) + img.cols * fabs(sin(angle * CV_PI / 180))) * scale;M.at<double>(0, 2) += (bound_w - img.cols) / 2.0; // x平移M.at<double>(1, 2) += (bound_h - img.rows) / 2.0; // y平移Mat dst;cv::warpAffine(img, dst, M, cv::Size(bound_w, bound_h));
五、warpPerspective
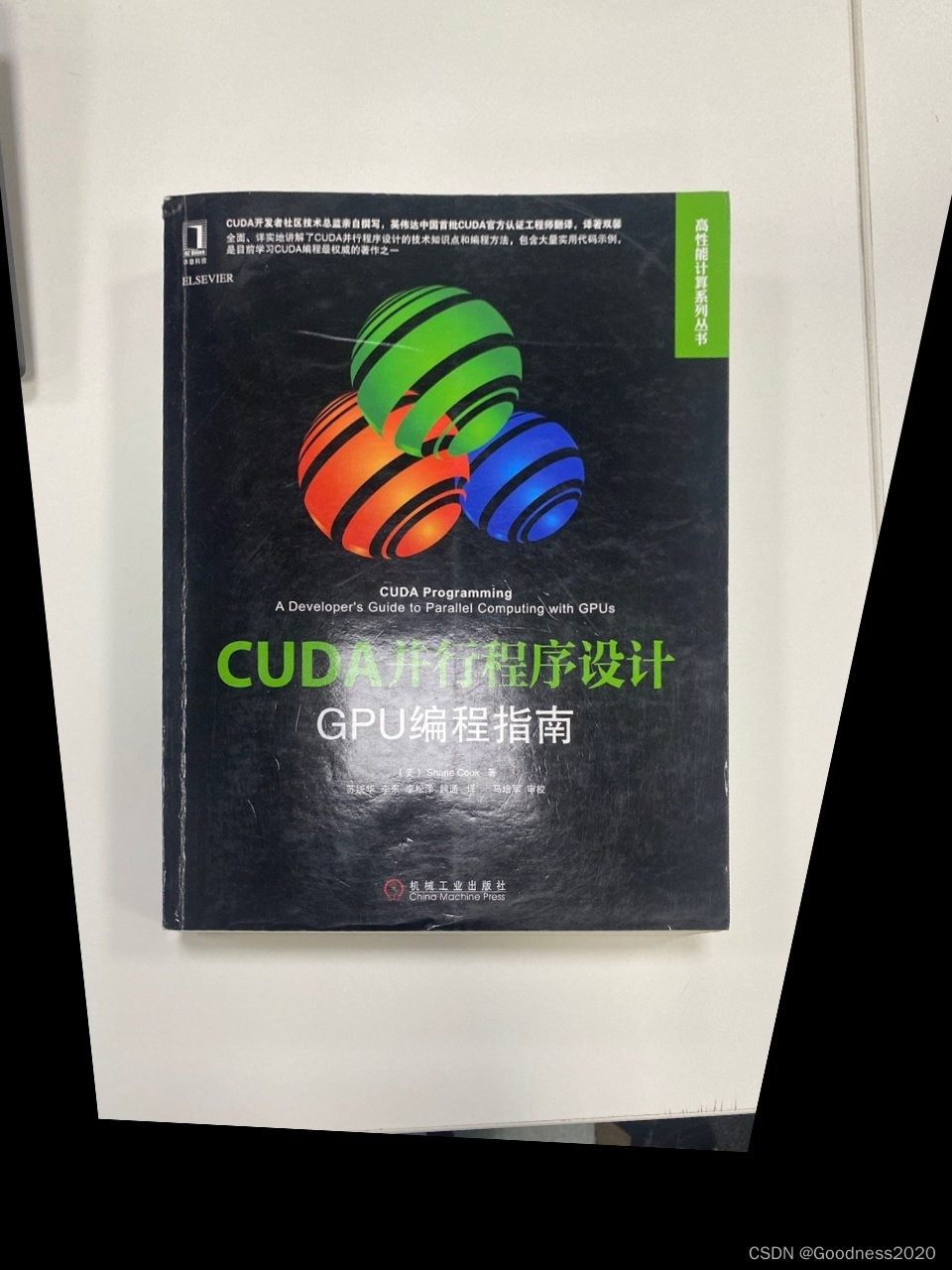
// 透视变换矩阵 M 3*3 --- 投影Point2f ptsF[4], ptsT[4];ptsF[0] = Point2f(163, 191);ptsF[1] = Point2f(735, 160);ptsF[2] = Point2f(872, 936);ptsF[3] = Point2f(112, 980);ptsT[0] = Point2f(163, 191);ptsT[1] = Point2f(735, 191);ptsT[2] = Point2f(735, 936);ptsT[3] = Point2f(163, 936);Mat M = cv::getPerspectiveTransform(ptsF, ptsT);Mat dst;cv::warpPerspective(img, dst, M, img.size());